 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEB-Naver: A SE(2)-based Local Navigation Framework for Car-like Robots on Uneven Terrain
Mar 05, 2025Autonomous navigation of car-like robots on uneven terrain poses unique challenges compared to flat terrain, particularly in traversability assessment and terrain-associated kinematic modelling for motion planning. This paper introduces SEB-Naver, a novel SE(2)-based local navigation framework designed to overcome these challenges. First, we propose an efficient traversability assessment method for SE(2) grids, leveraging GPU parallel computing to enable real-time updates and maintenance of local maps. Second, inspired by differential flatness, we present an optimization-based trajectory planning method that integrates terrain-associated kinematic models, significantly improving both planning efficiency and trajectory quality. Finally, we unify these components into SEB-Naver, achieving real-time terrain assessment and trajectory optimization. Extensive simulations and real-world experiments demonstrate the effectiveness and efficiency of our approach. The code is at https://github.com/ZJU-FAST-Lab/seb_naver.
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Vehicles in Unstructured Environments
Feb 27, 2025The tractor-trailer vehicle (robot) consists of a drivable tractor and one or more non-drivable trailers connected via hitches. Compared to typical car-like robots, the addition of trailers provides greater transportation capability. However, this also complicates motion planning due to the robot's complex kinematics, high-dimensional state space, and deformable structure. To efficiently plan safe, time-optimal trajectories that adhere to the kinematic constraints of the robot and address the challenges posed by its unique features, this paper introduces a lightweight, compact, and high-order smooth trajectory representation for tractor-trailer robots. Based on it, we design an efficiently solvable spatio-temporal trajectory optimization problem. To deal with deformable structures, which leads to difficulties in collision avoidance, we fully leverage the collision-free regions of the environment, directly applying deformations to trajectories in continuous space. This approach not requires constructing safe regions from the environment using convex approximations through collision-free seed points before each optimization, avoiding the loss of the solution space, thus reducing the dependency of the optimization on initial values. Moreover, a multi-terminal fast path search algorithm is proposed to generate the initial values for optimization. Extensive simulation experiments demonstrate that our approach achieves several-fold improvements in efficiency compared to existing algorithms, while also ensuring lower curvature and trajectory duration. Real-world experiments involving the transportation, loading and unloading of goods in both indoor and outdoor scenarios further validate the effectiveness of our method. The source code is accessible at https://github.com/ZJU-FAST-Lab/tracailer/.
Towards Medical Knowmetrics: Representing and Computing Medical Knowledge using Semantic Predications as the Knowledge Unit and the Uncertainty as the Knowledge Context
Oct 25, 2020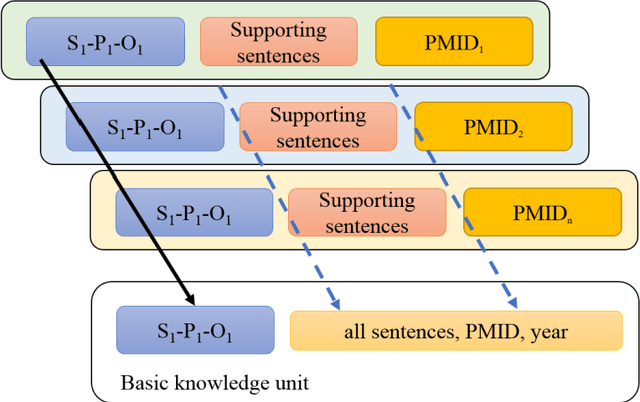
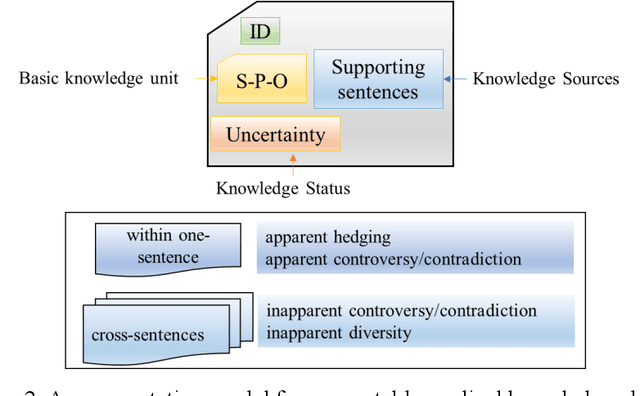


In China, Prof. Hongzhou Zhao and Zeyuan Liu are the pioneers of the concept "knowledge unit" and "knowmetrics" for measuring knowledge. However, the definition of "computable knowledge object" remains controversial so far in different fields. For example, it is defined as 1) quantitative scientific concept in natural science and engineering, 2) knowledge point in the field of education research, and 3) semantic predications, i.e., Subject-Predicate-Object (SPO) triples in biomedical fields. The Semantic MEDLINE Database (SemMedDB), a high-quality public repository of SPO triples extracted from medical literature, provides a basic data infrastructure for measuring medical knowledge. In general, the study of extracting SPO triples as computable knowledge unit from unstructured scientific text has been overwhelmingly focusing on scientific knowledge per se. Since the SPO triples would be possibly extracted from hypothetical, speculative statements or even conflicting and contradictory assertions, the knowledge status (i.e., the uncertainty), which serves as an integral and critical part of scientific knowledge has been largely overlooked. This article aims to put forward a framework for Medical Knowmetrics using the SPO triples as the knowledge unit and the uncertainty as the knowledge context. The lung cancer publications dataset is used to validate the proposed framework. The uncertainty of medical knowledge and how its status evolves over time indirectly reflect the strength of competing knowledge claims, and the probability of certainty for a given SPO triple. We try to discuss the new insights using the uncertainty-centric approaches to detect research fronts, and identify knowledge claims with high certainty level, in order to improve the efficacy of knowledge-driven decision support.