 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLOAT Drone for Physical Interaction: Lateral Airflow Reduction, Wrench Modeling, and Adaptive Control
Jul 05, 2026Aerial physical interaction represents a promising direction for next-generation unmanned aerial vehicles (UAVs), but it requires an aerial platform that can exert contact forces while maintaining stable flight. For close-proximity tasks, this translates into three coupled design requirements: multidimensional wrench generation for stable contact, compactness for maneuverability and safety in confined spaces, and reduced lateral airflow toward the target when generating horizontal force. This article presents FLOAT Drone, a fully actuated coaxial UAV with servo-driven control surfaces for close-proximity physical interaction. The coaxial dual-rotor layout provides a compact propulsion layout, while the control surfaces, immersed in the rotor downwash, generate lateral forces and moments for 6-DoF wrench generation. A force-matched computational fluid dynamics (CFD) comparison with a tilted-rotor alternative quantifies the reduction in target-facing lateral airflow. To account for nonlinear rotor--control-surface coupling in the rotor wake, a high-fidelity polynomial aerodynamic wrench model is identified from precision force measurements and embedded in a constrained nonlinear allocator for real-time wrench tracking. Comparative flight and interaction experiments show that the proposed framework improves control accuracy over linear allocation baselines, rejects ground-effect and payload disturbances, and enables close-proximity drawer push--pull manipulation through a $2~\mathrm{cm}$ handle clearance.
Precise Aggressive Aerial Maneuvers with Sensorimotor Policies
Apr 07, 2026Precise aggressive maneuvers with lightweight onboard sensors remains a key bottleneck in fully exploiting the maneuverability of drones. Such maneuvers are critical for expanding the systems' accessible area by navigating through narrow openings in the environment. Among the most relevant problems, a representative one is aggressive traversal through narrow gaps with quadrotors under SE(3) constraints, which require the quadrotors to leverage a momentary tilted attitude and the asymmetry of the airframe to navigate through gaps. In this paper, we achieve such maneuvers by developing sensorimotor policies directly mapping onboard vision and proprioception into low-level control commands. The policies are trained using reinforcement learning (RL) with end-to-end policy distillation in simulation. We mitigate the fundamental hardness of model-free RL's exploration on the restricted solution space with an initialization strategy leveraging trajectories generated by a model-based planner. Careful sim-to-real design allows the policy to control a quadrotor through narrow gaps with low clearances and high repeatability. For instance, the proposed method enables a quadrotor to navigate a rectangular gap at a 5 cm clearance, tilted at up to 90-degree orientation, without knowledge of the gap's position or orientation. Without training on dynamic gaps, the policy can reactively servo the quadrotor to traverse through a moving gap. The proposed method is also validated by training and deploying policies on challenging tracks of narrow gaps placed closely. The flexibility of the policy learning method is demonstrated by developing policies for geometrically diverse gaps, without relying on manually defined traversal poses and visual features.
Primitive-based Truncated Diffusion for Efficient Trajectory Generation of Differential Drive Mobile Manipulators
Apr 05, 2026We present a learning-enhanced motion planner for differential drive mobile manipulators to improve efficiency, success rate, and optimality. For task representation encoder, we propose a keypoint sequence extraction module that maps boundary states to 3D space via differentiable forward kinematics. Point clouds and keypoints are encoded separately and fused with attention, enabling effective integration of environment and boundary states information. We also propose a primitive-based truncated diffusion model that samples from a biased distribution. Compared with vanilla diffusion model, this framework improves the efficiency and diversity of the solution. Denoised paths are refined by trajectory optimization to ensure dynamic feasibility and task-specific optimality. In cluttered 3D simulations, our method achieves higher success rate, improved trajectory diversity, and competitive runtime compared to vanilla diffusion and classical baselines. The source code is released at https://github.com/nmoma/nmoma .
TriphiBot: A Triphibious Robot Combining FOC-based Propulsion with Eccentric Design
Feb 01, 2026Triphibious robots capable of multi-domain motion and cross-domain transitions are promising to handle complex tasks across diverse environments. However, existing designs primarily focus on dual-mode platforms, and some designs suffer from high mechanical complexity or low propulsion efficiency, which limits their application. In this paper, we propose a novel triphibious robot capable of aerial, terrestrial, and aquatic motion, by a minimalist design combining a quadcopter structure with two passive wheels, without extra actuators. To address inefficiency of ground-support motion (moving on land/seabed) for quadcopter based designs, we introduce an eccentric Center of Gravity (CoG) design that inherently aligns thrust with motion, enhancing efficiency without specialized mechanical transformation designs. Furthermore, to address the drastic differences in motion control caused by different fluids (air and water), we develop a unified propulsion system based on Field-Oriented Control (FOC). This method resolves torque matching issues and enables precise, rapid bidirectional thrust across different mediums. Grounded in the perspective of living condition and ground support, we analyse the robot's dynamics and propose a Hybrid Nonlinear Model Predictive Control (HNMPC)-PID control system to ensure stable multi-domain motion and seamless transitions. Experimental results validate the robot's multi-domain motion and cross-mode transition capability, along with the efficiency and adaptability of the proposed propulsion system.
Trajectory Optimization for Differential Drive Mobile Manipulators via Topological Paths Search and Arc Length-Yaw Parameterization
Jul 03, 2025We present an efficient hierarchical motion planning pipeline for differential drive mobile manipulators. Our approach first searches for multiple collisionfree and topologically distinct paths for the mobile base to extract the space in which optimal solutions may exist. Further sampling and optimization are then conducted in parallel to explore feasible whole-body trajectories. For trajectory optimization, we employ polynomial trajectories and arc length-yaw parameterization, enabling efficient handling of the nonholonomic dynamics while ensuring optimality.
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Vehicles in Unstructured Environments
Feb 27, 2025The tractor-trailer vehicle (robot) consists of a drivable tractor and one or more non-drivable trailers connected via hitches. Compared to typical car-like robots, the addition of trailers provides greater transportation capability. However, this also complicates motion planning due to the robot's complex kinematics, high-dimensional state space, and deformable structure. To efficiently plan safe, time-optimal trajectories that adhere to the kinematic constraints of the robot and address the challenges posed by its unique features, this paper introduces a lightweight, compact, and high-order smooth trajectory representation for tractor-trailer robots. Based on it, we design an efficiently solvable spatio-temporal trajectory optimization problem. To deal with deformable structures, which leads to difficulties in collision avoidance, we fully leverage the collision-free regions of the environment, directly applying deformations to trajectories in continuous space. This approach not requires constructing safe regions from the environment using convex approximations through collision-free seed points before each optimization, avoiding the loss of the solution space, thus reducing the dependency of the optimization on initial values. Moreover, a multi-terminal fast path search algorithm is proposed to generate the initial values for optimization. Extensive simulation experiments demonstrate that our approach achieves several-fold improvements in efficiency compared to existing algorithms, while also ensuring lower curvature and trajectory duration. Real-world experiments involving the transportation, loading and unloading of goods in both indoor and outdoor scenarios further validate the effectiveness of our method. The source code is accessible at https://github.com/ZJU-FAST-Lab/tracailer/.
Skater: A Novel Bi-modal Bi-copter Robot for Adaptive Locomotion in Air and Diverse Terrain
Mar 04, 2024



In this letter, we present a novel bi-modal bi-copter robot called Skater, which is adaptable to air and various ground surfaces. Skater consists of a bi-copter moving along its longitudinal direction with two passive wheels on both sides. Using longitudinally arranged bi-copter as the unified actuation system for both aerial and ground modes, this robot not only keeps concise and lightweight mechanism, but also possesses exceptional terrain traversing capability and strong steering capacity. Moreover, leveraging the vectored thrust characteristic of bi-copters, Skater can actively generate the centripetal force needed for steering, enabling it to achieve stable movement even on slippery surfaces. Furthermore, we model the comprehensive dynamics of Skater, analyze its differential flatness and introduce a controller using nonlinear model predictive control for trajectory tracking. The outstanding performance of the system is verified by extensive real-world experiments and benchmark comparisons.
Model-Based Planning and Control for Terrestrial-Aerial Bimodal Vehicles with Passive Wheels
Mar 01, 2024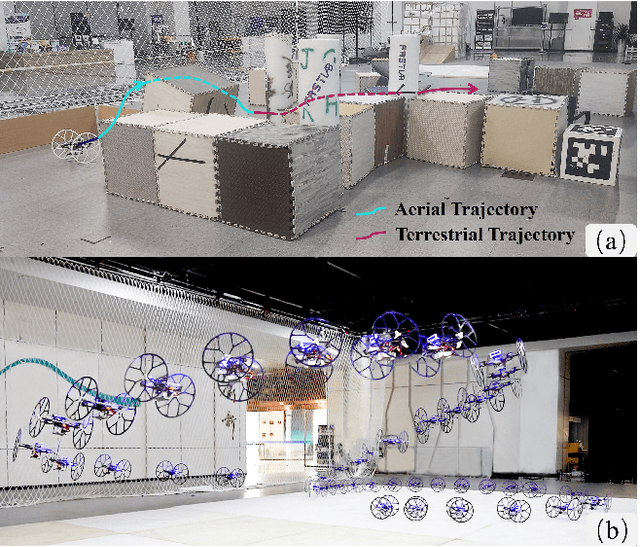
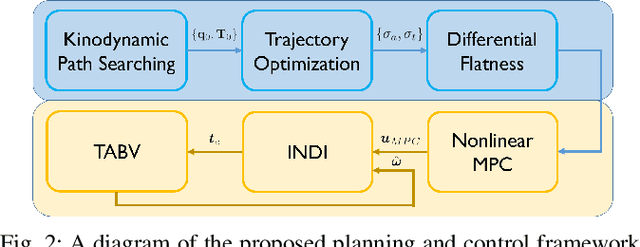
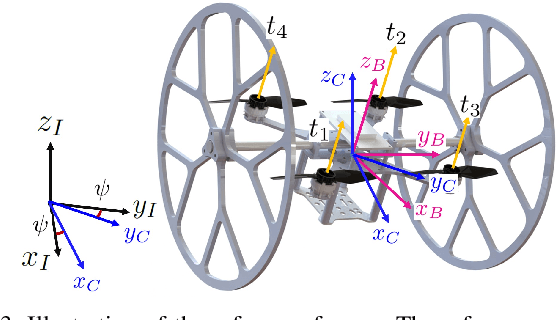
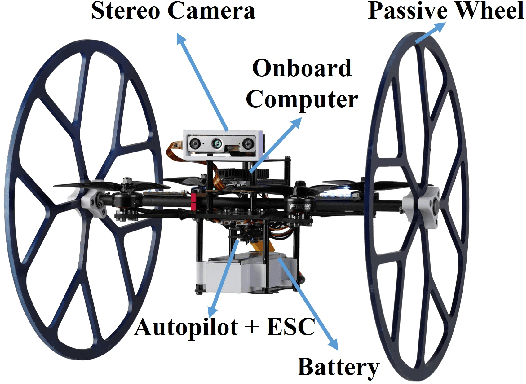
Terrestrial and aerial bimodal vehicles have gained widespread attention due to their cross-domain maneuverability. Nevertheless, their bimodal dynamics significantly increase the complexity of motion planning and control, thus hindering robust and efficient autonomous navigation in unknown environments. To resolve this issue, we develop a model-based planning and control framework for terrestrial aerial bi-modal vehicles. This work begins by deriving a unified dynamic model and the corresponding differential flatness. Leveraging differential flatness, an optimization-based trajectory planner is proposed, which takes into account both solution quality and computational efficiency. Moreover, we design a tracking controller using nonlinear model predictive control based on the proposed unified dynamic model to achieve accurate trajectory tracking and smooth mode transition. We validate our framework through extensive benchmark comparisons and experiments, demonstrating its effectiveness in terms of planning quality and control performance.
Collaborative Planning for Catching and Transporting Objects in Unstructured Environments
Nov 13, 2023



Multi-robot teams have attracted attention from industry and academia for their ability to perform collaborative tasks in unstructured environments, such as wilderness rescue and collaborative transportation.In this paper, we propose a trajectory planning method for a non-holonomic robotic team with collaboration in unstructured environments.For the adaptive state collaboration of a robot team to catch and transport targets to be rescued using a net, we model the process of catching the falling target with a net in a continuous and differentiable form.This enables the robot team to fully exploit the kinematic potential, thereby adaptively catching the target in an appropriate state.Furthermore, the size safety and topological safety of the net, resulting from the collaborative support of the robots, are guaranteed through geometric constraints.We integrate our algorithm on a car-like robot team and test it in simulations and real-world experiments to validate our performance.Our method is compared to state-of-the-art multi-vehicle trajectory planning methods, demonstrating significant performance in efficiency and trajectory quality.