 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Dense and Accurate Radar Perception Via Efficient Cross-Modal Diffusion Model
Mar 19, 2024Millimeter wave (mmWave) radars have attracted significant attention from both academia and industry due to their capability to operate in extreme weather conditions. However, they face challenges in terms of sparsity and noise interference, which hinder their application in the field of micro aerial vehicle (MAV) autonomous navigation. To this end, this paper proposes a novel approach to dense and accurate mmWave radar point cloud construction via cross-modal learning. Specifically, we introduce diffusion models, which possess state-of-the-art performance in generative modeling, to predict LiDAR-like point clouds from paired raw radar data. We also incorporate the most recent diffusion model inference accelerating techniques to ensure that the proposed method can be implemented on MAVs with limited computing resources.We validate the proposed method through extensive benchmark comparisons and real-world experiments, demonstrating its superior performance and generalization ability. Code and pretrained models will be available at https://github.com/ZJU-FAST-Lab/Radar-Diffusion.
Skater: A Novel Bi-modal Bi-copter Robot for Adaptive Locomotion in Air and Diverse Terrain
Mar 04, 2024



In this letter, we present a novel bi-modal bi-copter robot called Skater, which is adaptable to air and various ground surfaces. Skater consists of a bi-copter moving along its longitudinal direction with two passive wheels on both sides. Using longitudinally arranged bi-copter as the unified actuation system for both aerial and ground modes, this robot not only keeps concise and lightweight mechanism, but also possesses exceptional terrain traversing capability and strong steering capacity. Moreover, leveraging the vectored thrust characteristic of bi-copters, Skater can actively generate the centripetal force needed for steering, enabling it to achieve stable movement even on slippery surfaces. Furthermore, we model the comprehensive dynamics of Skater, analyze its differential flatness and introduce a controller using nonlinear model predictive control for trajectory tracking. The outstanding performance of the system is verified by extensive real-world experiments and benchmark comparisons.
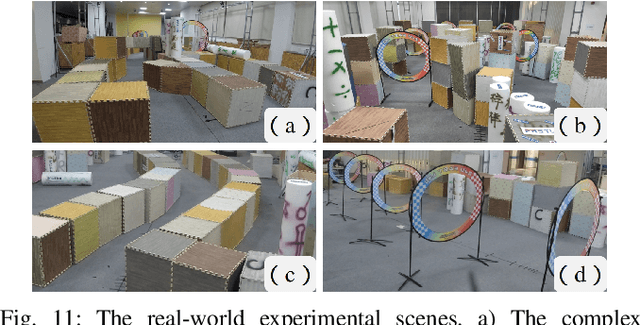
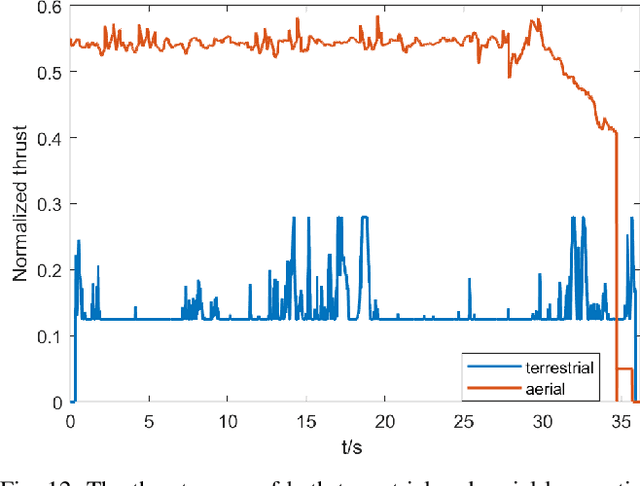
Model-Based Planning and Control for Terrestrial-Aerial Bimodal Vehicles with Passive Wheels
Mar 01, 2024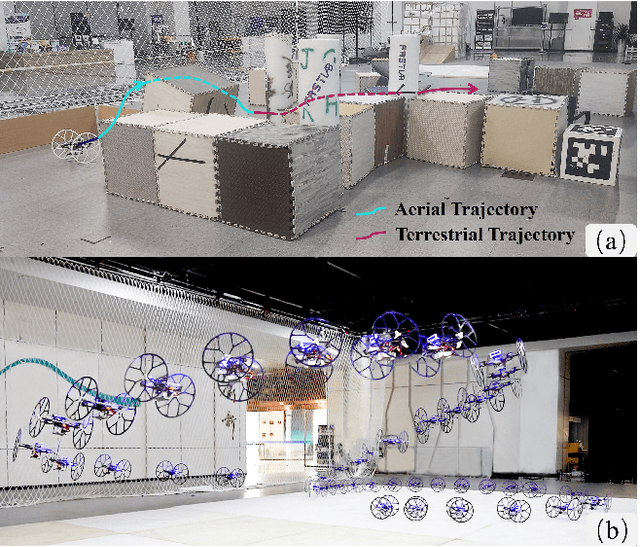
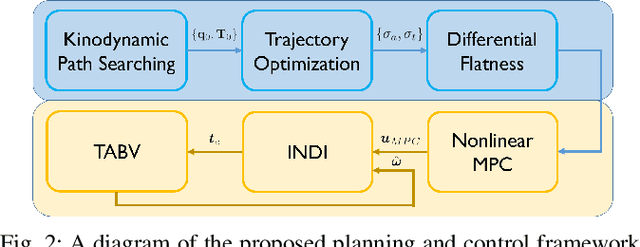
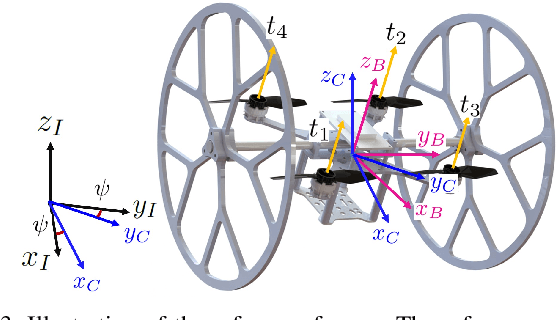
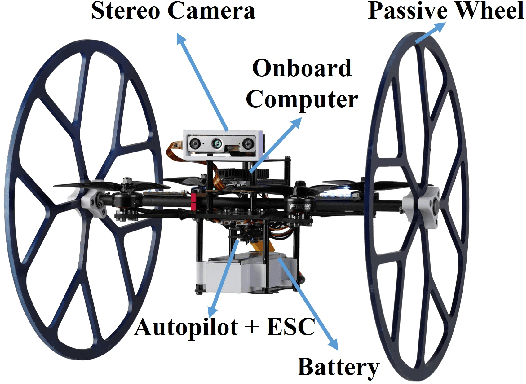
Terrestrial and aerial bimodal vehicles have gained widespread attention due to their cross-domain maneuverability. Nevertheless, their bimodal dynamics significantly increase the complexity of motion planning and control, thus hindering robust and efficient autonomous navigation in unknown environments. To resolve this issue, we develop a model-based planning and control framework for terrestrial aerial bi-modal vehicles. This work begins by deriving a unified dynamic model and the corresponding differential flatness. Leveraging differential flatness, an optimization-based trajectory planner is proposed, which takes into account both solution quality and computational efficiency. Moreover, we design a tracking controller using nonlinear model predictive control based on the proposed unified dynamic model to achieve accurate trajectory tracking and smooth mode transition. We validate our framework through extensive benchmark comparisons and experiments, demonstrating its effectiveness in terms of planning quality and control performance.
Concealed Electronic Countermeasures of Radar Signal with Adversarial Examples
Oct 12, 2023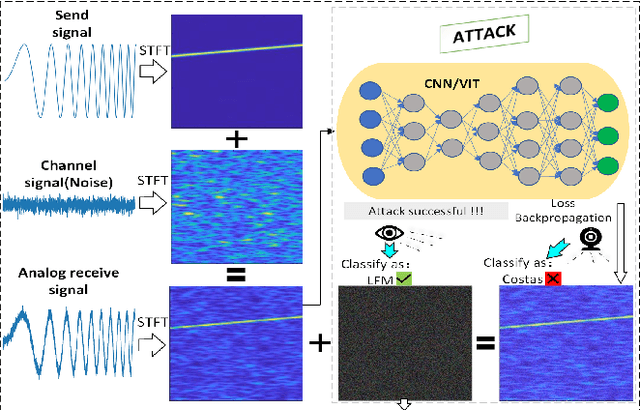
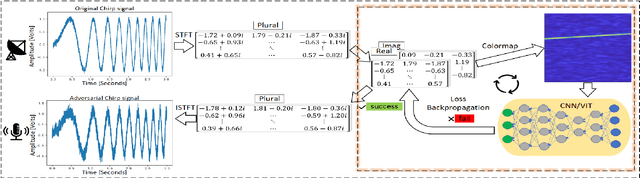


Electronic countermeasures involving radar signals are an important aspect of modern warfare. Traditional electronic countermeasures techniques typically add large-scale interference signals to ensure interference effects, which can lead to attacks being too obvious. In recent years, AI-based attack methods have emerged that can effectively solve this problem, but the attack scenarios are currently limited to time domain radar signal classification. In this paper, we focus on the time-frequency images classification scenario of radar signals. We first propose an attack pipeline under the time-frequency images scenario and DITIMI-FGSM attack algorithm with high transferability. Then, we propose STFT-based time domain signal attack(STDS) algorithm to solve the problem of non-invertibility in time-frequency analysis, thus obtaining the time-domain representation of the interference signal. A large number of experiments show that our attack pipeline is feasible and the proposed attack method has a high success rate.
Roller-Quadrotor: A Novel Hybrid Terrestrial/Aerial Quadrotor with Unicycle-Driven and Rotor-Assisted Turning
Mar 02, 2023



Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle. This work presents the design, modeling, and experimental validation of Roller-Quadrotor. Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode. This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows to through special terrain, such as narrow gaps. It also solves the obstacle avoidance challenge faced by terrestrial robots by flying. We design the models and controllers for the vehicle. The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying. These results demonstrate the feasibility and effectiveness of the structure and control in rolling through special terrain and energy saving.
TIE: An Autonomous and Adaptive Terrestrial-Aerial Quadrotor
Sep 10, 2021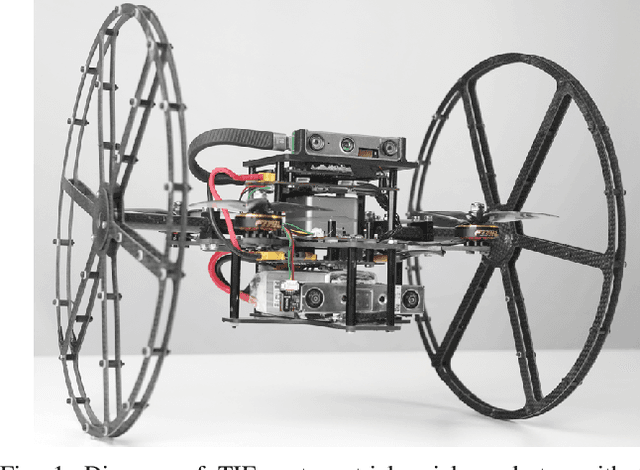
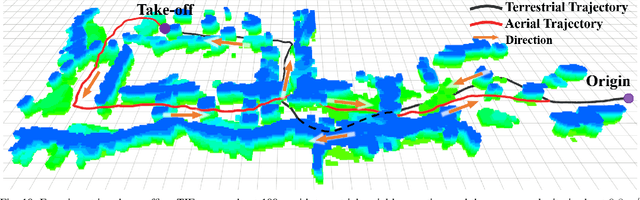
This letter presents a fully autonomous robot system that possesses both terrestrial and aerial mobility. We firstly develop a lightweight terrestrial-aerial quadrotor that carries sufficient sensing and computing resources. It incorporates both the high mobility of unmanned aerial vehicles and the long endurance of unmanned ground vehicles. An adaptive navigation framework is then proposed that brings complete autonomy to it. In this framework, a hierarchical motion planner is proposed to generate safe and low-power terrestrial-aerial trajectories in unknown environments. Moreover, we present a unified motion controller which dynamically adjusts energy consumption in terrestrial locomotion. Extensive realworld experiments and benchmark comparisons validate the robustness and outstanding performance of the proposed system. During the tests, it safely traverses complex environments with terrestrial aerial integrated mobility, and achieves 7 times energy savings in terrestrial locomotion. Finally, we will release our code and hardware configuration as an open-source package.
Fast-Tracker 2.0: Improving Autonomy of Aerial Tracking with Active Vision and Human Location Regression
Mar 11, 2021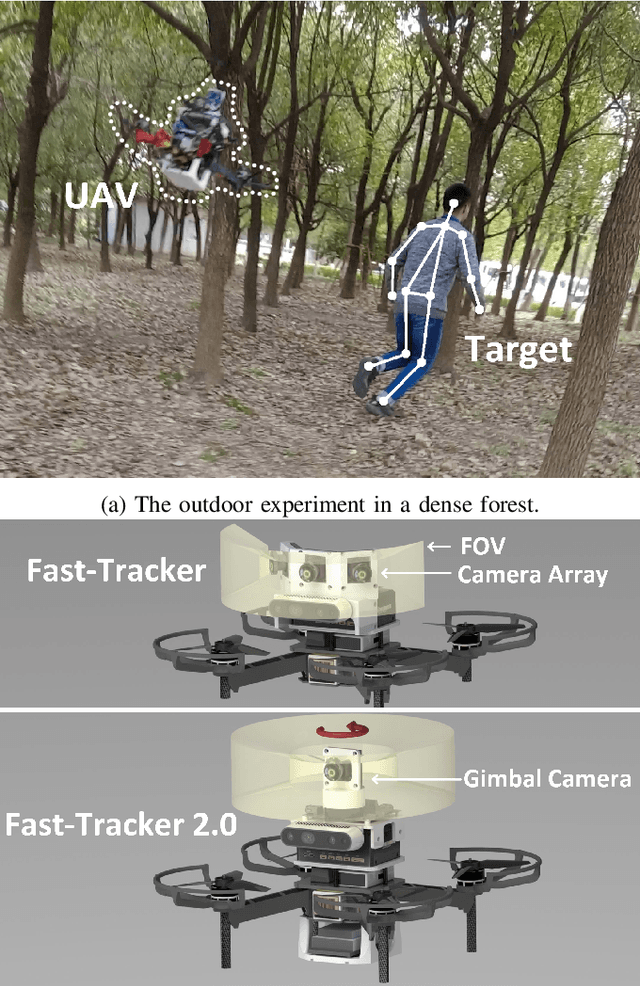
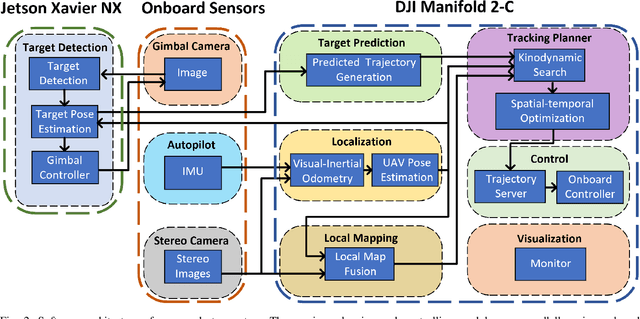
In recent years, several progressive works promote the development of aerial tracking. One of the representative works is our previous work Fast-tracker which is applicable to various challenging tracking scenarios. However, it suffers from two main drawbacks: 1) the over simplification in target detection by using artificial markers and 2) the contradiction between simultaneous target and environment perception with limited onboard vision. In this paper, we upgrade the target detection in Fast-tracker to detect and localize a human target based on deep learning and non-linear regression to solve the former problem. For the latter one, we equip the quadrotor system with 360 degree active vision on a customized gimbal camera. Furthermore, we improve the tracking trajectory planning in Fast-tracker by incorporating an occlusion-aware mechanism that generates observable tracking trajectories. Comprehensive real-world tests confirm the proposed system's robustness and real-time capability. Benchmark comparisons with Fast-tracker validate that the proposed system presents better tracking performance even when performing more difficult tracking tasks.
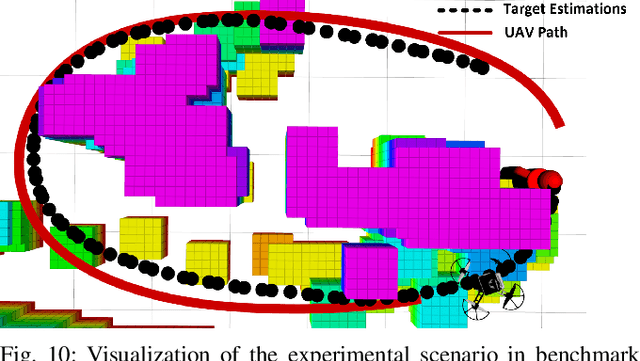
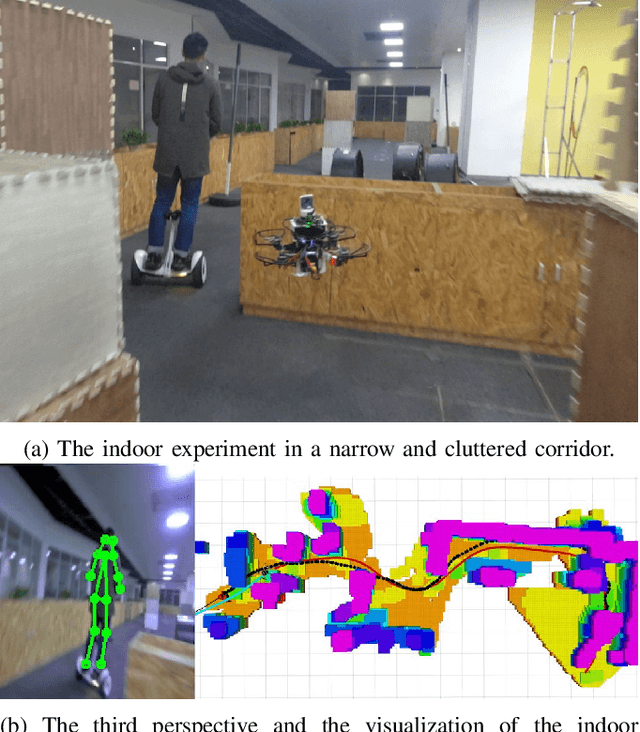
Fast-Tracker: A Robust Aerial System for Tracking Agile Target in Cluttered Environments
Nov 08, 2020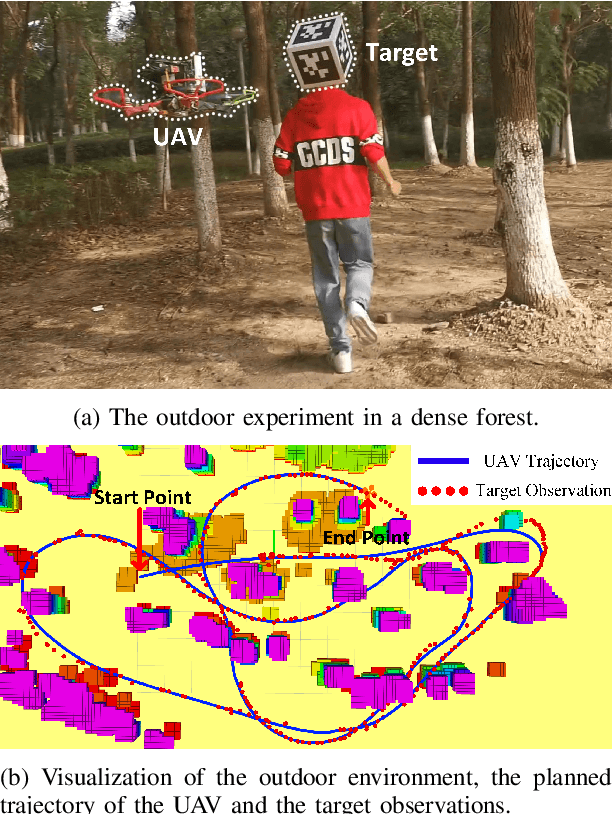
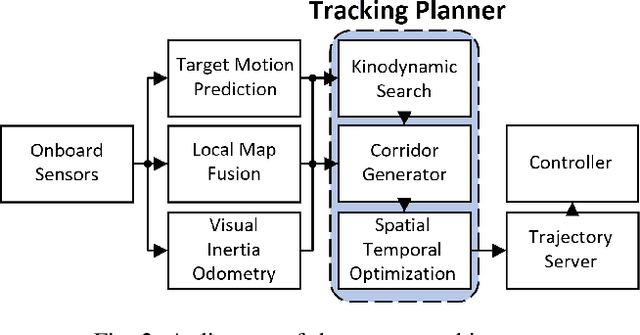
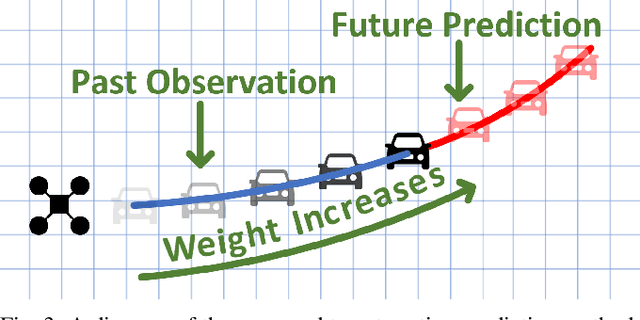
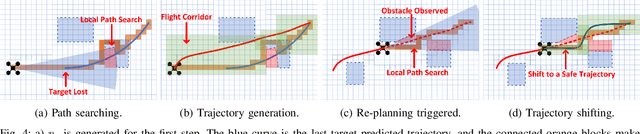
This paper proposes a systematic solution that uses an unmanned aerial vehicle (UAV) to aggressively and safely track an agile target. The solution properly handles the challenging situations where the intent of the target and the dense environments are unknown to the UAV. Our work is divided into two parts: target motion prediction and tracking trajectory planning. The target motion prediction method utilizes target observations to reliably predict the future motion of the target considering dynamic constraints. The tracking trajectory planner follows the traditional hierarchical workflow.A target informed kinodynamic searching method is adopted as the front-end, which heuristically searches for a safe tracking trajectory. The back-end optimizer then refines it into a spatial-temporal optimal and collision-free trajectory. The proposed solution is integrated into an onboard quadrotor system. We fully test the system in challenging real-world tracking missions.Moreover, benchmark comparisons validate that the proposed method surpasses the cutting-edge methods on time efficiency and tracking effectiveness.