 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLessons from Deploying Learning-based CSI Localization on a Large-Scale ISAC Platform
Apr 24, 2025In recent years, Channel State Information (CSI), recognized for its fine-grained spatial characteristics, has attracted increasing attention in WiFi-based indoor localization. However, despite its potential, CSI-based approaches have yet to achieve the same level of deployment scale and commercialization as those based on Received Signal Strength Indicator (RSSI). A key limitation lies in the fact that most existing CSI-based systems are developed and evaluated in controlled, small-scale environments, limiting their generalizability. To bridge this gap, we explore the deployment of a large-scale CSI-based localization system involving over 400 Access Points (APs) in a real-world building under the Integrated Sensing and Communication (ISAC) paradigm. We highlight two critical yet often overlooked factors: the underutilization of unlabeled data and the inherent heterogeneity of CSI measurements. To address these challenges, we propose a novel CSI-based learning framework for WiFi localization, tailored for large-scale ISAC deployments on the server side. Specifically, we employ a novel graph-based structure to model heterogeneous CSI data and reduce redundancy. We further design a pretext pretraining task that incorporates spatial and temporal priors to effectively leverage large-scale unlabeled CSI data. Complementarily, we introduce a confidence-aware fine-tuning strategy to enhance the robustness of localization results. In a leave-one-smartphone-out experiment spanning five floors and 25, 600 m2, we achieve a median localization error of 2.17 meters and a floor accuracy of 99.49%. This performance corresponds to an 18.7% reduction in mean absolute error (MAE) compared to the best-performing baseline.
IFNet: Deep Imaging and Focusing for Handheld SAR with Millimeter-wave Signals
May 06, 2024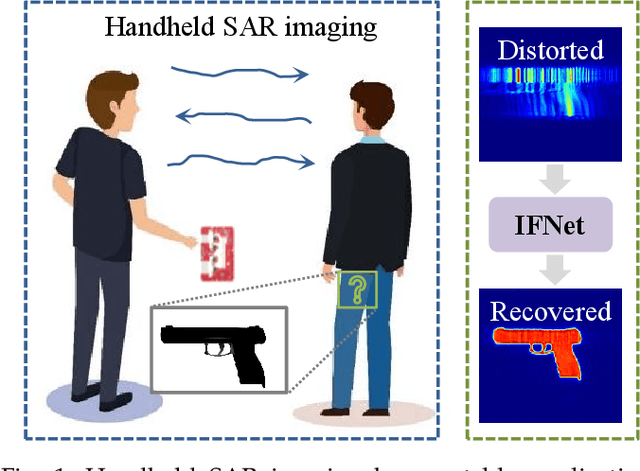
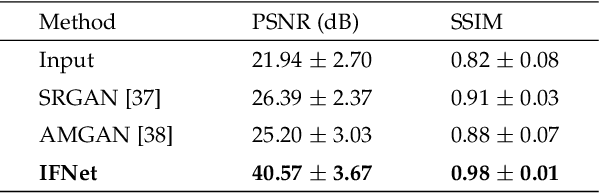
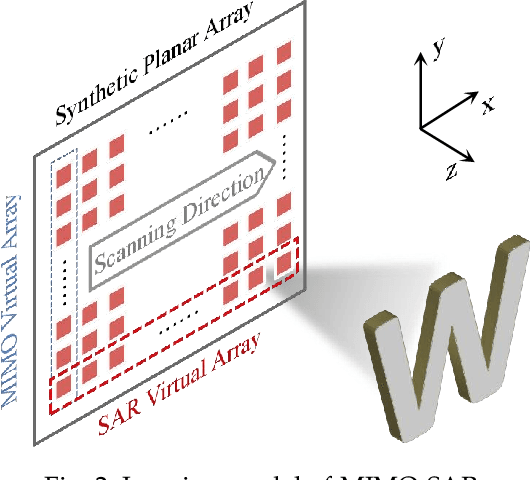

Recent advancements have showcased the potential of handheld millimeter-wave (mmWave) imaging, which applies synthetic aperture radar (SAR) principles in portable settings. However, existing studies addressing handheld motion errors either rely on costly tracking devices or employ simplified imaging models, leading to impractical deployment or limited performance. In this paper, we present IFNet, a novel deep unfolding network that combines the strengths of signal processing models and deep neural networks to achieve robust imaging and focusing for handheld mmWave systems. We first formulate the handheld imaging model by integrating multiple priors about mmWave images and handheld phase errors. Furthermore, we transform the optimization processes into an iterative network structure for improved and efficient imaging performance. Extensive experiments demonstrate that IFNet effectively compensates for handheld phase errors and recovers high-fidelity images from severely distorted signals. In comparison with existing methods, IFNet can achieve at least 11.89 dB improvement in average peak signal-to-noise ratio (PSNR) and 64.91% improvement in average structural similarity index measure (SSIM) on a real-world dataset.
Towards Dense and Accurate Radar Perception Via Efficient Cross-Modal Diffusion Model
Mar 19, 2024Millimeter wave (mmWave) radars have attracted significant attention from both academia and industry due to their capability to operate in extreme weather conditions. However, they face challenges in terms of sparsity and noise interference, which hinder their application in the field of micro aerial vehicle (MAV) autonomous navigation. To this end, this paper proposes a novel approach to dense and accurate mmWave radar point cloud construction via cross-modal learning. Specifically, we introduce diffusion models, which possess state-of-the-art performance in generative modeling, to predict LiDAR-like point clouds from paired raw radar data. We also incorporate the most recent diffusion model inference accelerating techniques to ensure that the proposed method can be implemented on MAVs with limited computing resources.We validate the proposed method through extensive benchmark comparisons and real-world experiments, demonstrating its superior performance and generalization ability. Code and pretrained models will be available at https://github.com/ZJU-FAST-Lab/Radar-Diffusion.
Passive Non-Line-of-Sight Imaging with Light Transport Modulation
Dec 26, 2023Passive non-line-of-sight (NLOS) imaging has witnessed rapid development in recent years, due to its ability to image objects that are out of sight. The light transport condition plays an important role in this task since changing the conditions will lead to different imaging models. Existing learning-based NLOS methods usually train independent models for different light transport conditions, which is computationally inefficient and impairs the practicality of the models. In this work, we propose NLOS-LTM, a novel passive NLOS imaging method that effectively handles multiple light transport conditions with a single network. We achieve this by inferring a latent light transport representation from the projection image and using this representation to modulate the network that reconstructs the hidden image from the projection image. We train a light transport encoder together with a vector quantizer to obtain the light transport representation. To further regulate this representation, we jointly learn both the reconstruction network and the reprojection network during training. A set of light transport modulation blocks is used to modulate the two jointly trained networks in a multi-scale way. Extensive experiments on a large-scale passive NLOS dataset demonstrate the superiority of the proposed method. The code is available at https://github.com/JerryOctopus/NLOS-LTM.
DREAM-PCD: Deep Reconstruction and Enhancement of mmWave Radar Pointcloud
Sep 27, 2023Millimeter-wave (mmWave) radar pointcloud offers attractive potential for 3D sensing, thanks to its robustness in challenging conditions such as smoke and low illumination. However, existing methods failed to simultaneously address the three main challenges in mmWave radar pointcloud reconstruction: specular information lost, low angular resolution, and strong interference and noise. In this paper, we propose DREAM-PCD, a novel framework that combines signal processing and deep learning methods into three well-designed components to tackle all three challenges: Non-Coherent Accumulation for dense points, Synthetic Aperture Accumulation for improved angular resolution, and Real-Denoise Multiframe network for noise and interference removal. Moreover, the causal multiframe and "real-denoise" mechanisms in DREAM-PCD significantly enhance the generalization performance. We also introduce RadarEyes, the largest mmWave indoor dataset with over 1,000,000 frames, featuring a unique design incorporating two orthogonal single-chip radars, lidar, and camera, enriching dataset diversity and applications. Experimental results demonstrate that DREAM-PCD surpasses existing methods in reconstruction quality, and exhibits superior generalization and real-time capabilities, enabling high-quality real-time reconstruction of radar pointcloud under various parameters and scenarios. We believe that DREAM-PCD, along with the RadarEyes dataset, will significantly advance mmWave radar perception in future real-world applications.
Recent Advances on Non-Line-of-Sight Imaging: Conventional Physical Models, Deep Learning, and New Scenes
Apr 28, 2021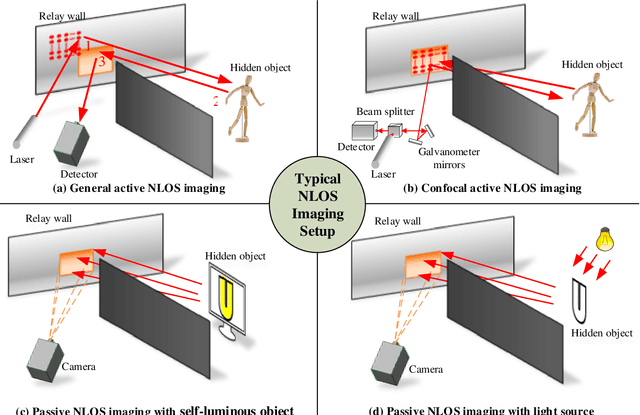
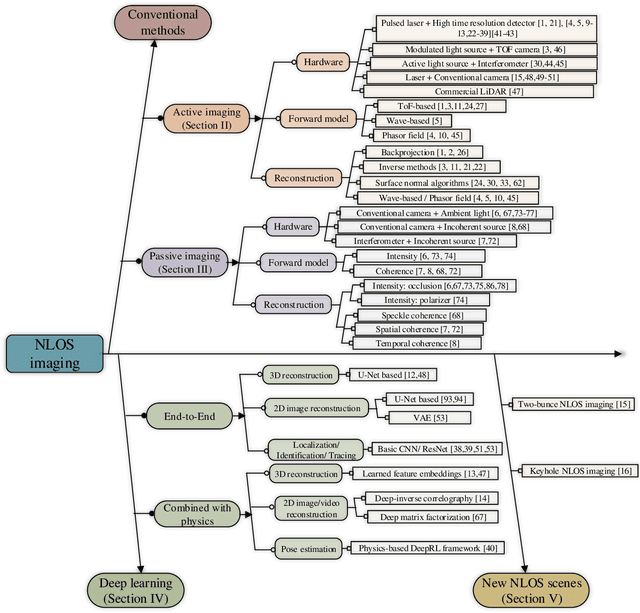
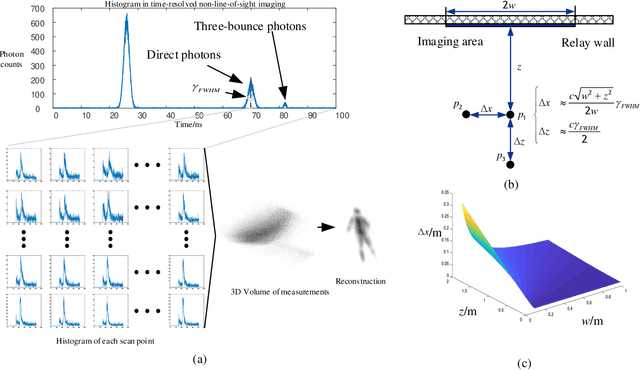
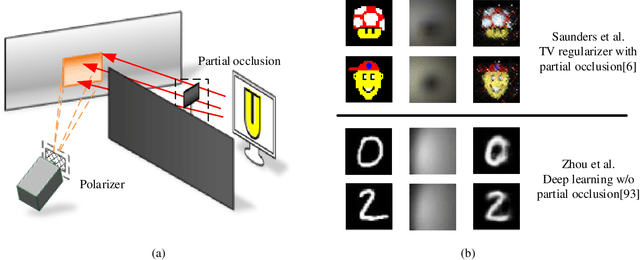
As an emerging technology that has attracted huge attention, non-line-of-sight (NLOS) imaging can reconstruct hidden objects by analyzing the diffuse reflection on a relay surface, with broad application prospects in the fields of autonomous driving, medical imaging, and defense. Despite the challenges of low signal-to-noise ratio (SNR) and high ill-posedness, NLOS imaging has been developed rapidly in recent years. Most current NLOS imaging technologies use conventional physical models, constructing imaging models through active or passive illumination and using reconstruction algorithms to restore hidden scenes. Moreover, deep learning algorithms for NLOS imaging have also received much attention recently. This paper presents a comprehensive overview of both conventional and deep learning-based NLOS imaging techniques. Besides, we also survey new proposed NLOS scenes, and discuss the challenges and prospects of existing technologies. Such a survey can help readers have an overview of different types of NLOS imaging, thus expediting the development of seeing around corners.