 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEO-RobotAgent: A General-purpose Robotic Agent for Language-driven Embodied Operator
Dec 11, 2025We propose LEO-RobotAgent, a general-purpose language-driven intelligent agent framework for robots. Under this framework, LLMs can operate different types of robots to complete unpredictable complex tasks across various scenarios. This framework features strong generalization, robustness, and efficiency. The application-level system built around it can fully enhance bidirectional human-robot intent understanding and lower the threshold for human-robot interaction. Regarding robot task planning, the vast majority of existing studies focus on the application of large models in single-task scenarios and for single robot types. These algorithms often have complex structures and lack generalizability. Thus, the proposed LEO-RobotAgent framework is designed with a streamlined structure as much as possible, enabling large models to independently think, plan, and act within this clear framework. We provide a modular and easily registrable toolset, allowing large models to flexibly call various tools to meet different requirements. Meanwhile, the framework incorporates a human-robot interaction mechanism, enabling the algorithm to collaborate with humans like a partner. Experiments have verified that this framework can be easily adapted to mainstream robot platforms including unmanned aerial vehicles (UAVs), robotic arms, and wheeled robot, and efficiently execute a variety of carefully designed tasks with different complexity levels. Our code is available at https://github.com/LegendLeoChen/LEO-RobotAgent.
Make Your MoVe: Make Your 3D Contents by Adapting Multi-View Diffusion Models to External Editing
Aug 11, 2025As 3D generation techniques continue to flourish, the demand for generating personalized content is rapidly rising. Users increasingly seek to apply various editing methods to polish generated 3D content, aiming to enhance its color, style, and lighting without compromising the underlying geometry. However, most existing editing tools focus on the 2D domain, and directly feeding their results into 3D generation methods (like multi-view diffusion models) will introduce information loss, degrading the quality of the final 3D assets. In this paper, we propose a tuning-free, plug-and-play scheme that aligns edited assets with their original geometry in a single inference run. Central to our approach is a geometry preservation module that guides the edited multi-view generation with original input normal latents. Besides, an injection switcher is proposed to deliberately control the supervision extent of the original normals, ensuring the alignment between the edited color and normal views. Extensive experiments show that our method consistently improves both the multi-view consistency and mesh quality of edited 3D assets, across multiple combinations of multi-view diffusion models and editing methods.
A practical guide to machine learning interatomic potentials -- Status and future
Mar 12, 2025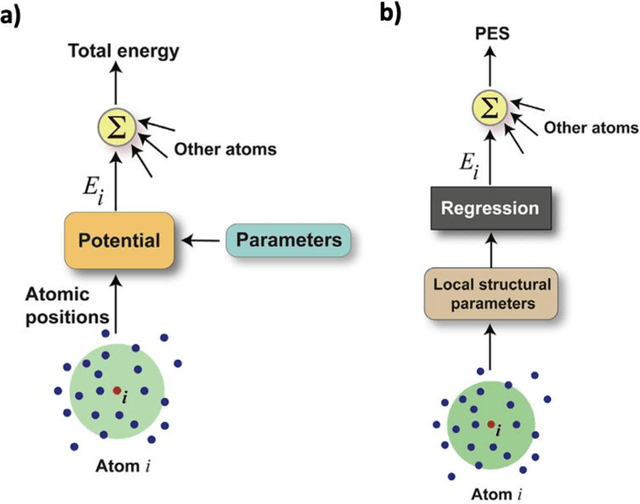

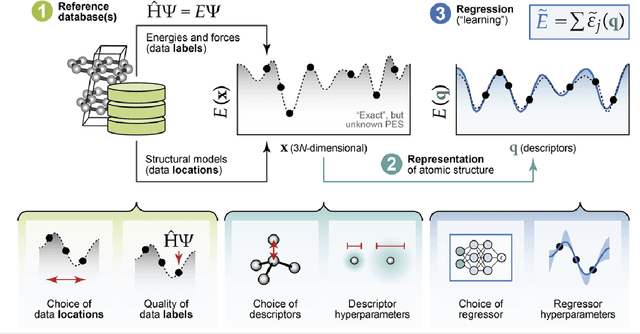
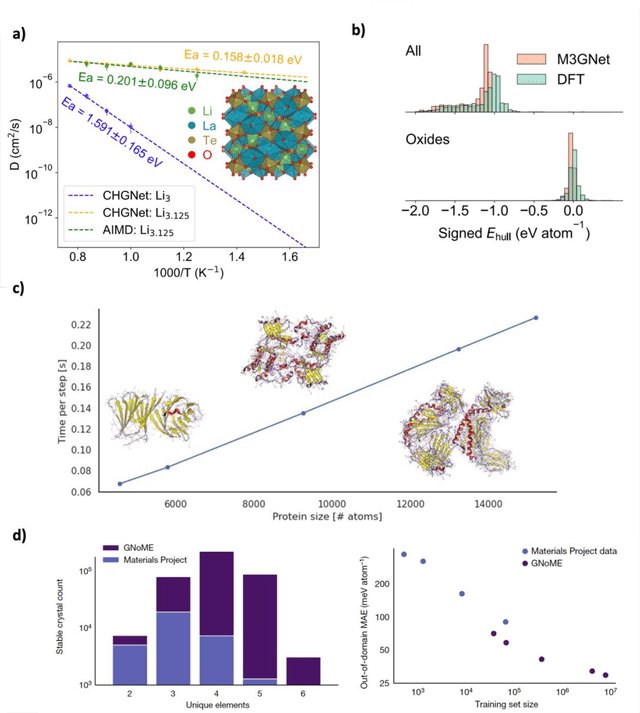
The rapid development and large body of literature on machine learning interatomic potentials (MLIPs) can make it difficult to know how to proceed for researchers who are not experts but wish to use these tools. The spirit of this review is to help such researchers by serving as a practical, accessible guide to the state-of-the-art in MLIPs. This review paper covers a broad range of topics related to MLIPs, including (i) central aspects of how and why MLIPs are enablers of many exciting advancements in molecular modeling, (ii) the main underpinnings of different types of MLIPs, including their basic structure and formalism, (iii) the potentially transformative impact of universal MLIPs for both organic and inorganic systems, including an overview of the most recent advances, capabilities, downsides, and potential applications of this nascent class of MLIPs, (iv) a practical guide for estimating and understanding the execution speed of MLIPs, including guidance for users based on hardware availability, type of MLIP used, and prospective simulation size and time, (v) a manual for what MLIP a user should choose for a given application by considering hardware resources, speed requirements, energy and force accuracy requirements, as well as guidance for choosing pre-trained potentials or fitting a new potential from scratch, (vi) discussion around MLIP infrastructure, including sources of training data, pre-trained potentials, and hardware resources for training, (vii) summary of some key limitations of present MLIPs and current approaches to mitigate such limitations, including methods of including long-range interactions, handling magnetic systems, and treatment of excited states, and finally (viii) we finish with some more speculative thoughts on what the future holds for the development and application of MLIPs over the next 3-10+ years.
MVReward: Better Aligning and Evaluating Multi-View Diffusion Models with Human Preferences
Dec 09, 2024



Recent years have witnessed remarkable progress in 3D content generation. However, corresponding evaluation methods struggle to keep pace. Automatic approaches have proven challenging to align with human preferences, and the mixed comparison of text- and image-driven methods often leads to unfair evaluations. In this paper, we present a comprehensive framework to better align and evaluate multi-view diffusion models with human preferences. To begin with, we first collect and filter a standardized image prompt set from DALL$\cdot$E and Objaverse, which we then use to generate multi-view assets with several multi-view diffusion models. Through a systematic ranking pipeline on these assets, we obtain a human annotation dataset with 16k expert pairwise comparisons and train a reward model, coined MVReward, to effectively encode human preferences. With MVReward, image-driven 3D methods can be evaluated against each other in a more fair and transparent manner. Building on this, we further propose Multi-View Preference Learning (MVP), a plug-and-play multi-view diffusion tuning strategy. Extensive experiments demonstrate that MVReward can serve as a reliable metric and MVP consistently enhances the alignment of multi-view diffusion models with human preferences.
GraphRelate3D: Context-Dependent 3D Object Detection with Inter-Object Relationship Graphs
May 10, 2024



Accurate and effective 3D object detection is critical for ensuring the driving safety of autonomous vehicles. Recently, state-of-the-art two-stage 3D object detectors have exhibited promising performance. However, these methods refine proposals individually, ignoring the rich contextual information in the object relationships between the neighbor proposals. In this study, we introduce an object relation module, consisting of a graph generator and a graph neural network (GNN), to learn the spatial information from certain patterns to improve 3D object detection. Specifically, we create an inter-object relationship graph based on proposals in a frame via the graph generator to connect each proposal with its neighbor proposals. Afterward, the GNN module extracts edge features from the generated graph and iteratively refines proposal features with the captured edge features. Ultimately, we leverage the refined features as input to the detection head to obtain detection results. Our approach improves upon the baseline PV-RCNN on the KITTI validation set for the car class across easy, moderate, and hard difficulty levels by 0.82%, 0.74%, and 0.58%, respectively. Additionally, our method outperforms the baseline by more than 1% under the moderate and hard levels BEV AP on the test server.
Intention-Aware Planner for Robust and Safe Aerial Tracking
Sep 16, 2023



The intention of the target can help us to estimate its future motion state more accurately. This paper proposes an intention-aware planner to enhance safety and robustness in aerial tracking applications. Firstly, we utilize the Mediapipe framework to estimate target's pose. A risk assessment function and a state observation function are designed to predict the target intention. Afterwards, an intention-driven hybrid A* method is proposed for target motion prediction, ensuring that the target's future positions align with its intention. Finally, an intention-aware optimization approach, in conjunction with particular penalty formulations, is designed to generate a spatial-temporal optimal trajectory. Benchmark comparisons validate the superior performance of our proposed methodology across diverse scenarios. This is attributed to the integration of the target intention into the planner through coupled formulations.
Roller-Quadrotor: A Novel Hybrid Terrestrial/Aerial Quadrotor with Unicycle-Driven and Rotor-Assisted Turning
Mar 02, 2023



Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle. This work presents the design, modeling, and experimental validation of Roller-Quadrotor. Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode. This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows to through special terrain, such as narrow gaps. It also solves the obstacle avoidance challenge faced by terrestrial robots by flying. We design the models and controllers for the vehicle. The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying. These results demonstrate the feasibility and effectiveness of the structure and control in rolling through special terrain and energy saving.
Catch Planner: Catching High-Speed Targets in the Flight
Feb 09, 2023



Catching high-speed targets in the flight is a complex and typical highly dynamic task. In this paper, we propose Catch Planner, a planning-with-decision scheme for catching. For sequential decision making, we propose a policy search method based on deep reinforcement learning. In order to make catching adaptive and flexible, we propose a trajectory optimization method to jointly optimize the highly coupled catching time and terminal state while considering the dynamic feasibility and safety. We also propose a flexible constraint transcription method to catch targets at any reasonable attitude and terminal position bias. The proposed Catch Planner provides a new paradigm for the combination of learning and planning and is integrated on the quadrotor designed by ourselves, which runs at 100$hz$ on the onboard computer. Extensive experiments are carried out in real and simulated scenes to verify the robustness of the proposed method and its expansibility when facing a variety of high-speed flying targets.