 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrior-guided Hierarchical Harmonization Network for Efficient Image Dehazing
Mar 03, 2025Image dehazing is a crucial task that involves the enhancement of degraded images to recover their sharpness and textures. While vision Transformers have exhibited impressive results in diverse dehazing tasks, their quadratic complexity and lack of dehazing priors pose significant drawbacks for real-world applications. In this paper, guided by triple priors, Bright Channel Prior (BCP), Dark Channel Prior (DCP), and Histogram Equalization (HE), we propose a \textit{P}rior-\textit{g}uided Hierarchical \textit{H}armonization Network (PGH$^2$Net) for image dehazing. PGH$^2$Net is built upon the UNet-like architecture with an efficient encoder and decoder, consisting of two module types: (1) Prior aggregation module that injects B/DCP and selects diverse contexts with gating attention. (2) Feature harmonization modules that subtract low-frequency components from spatial and channel aspects and learn more informative feature distributions to equalize the feature maps.
GraphRelate3D: Context-Dependent 3D Object Detection with Inter-Object Relationship Graphs
May 10, 2024



Accurate and effective 3D object detection is critical for ensuring the driving safety of autonomous vehicles. Recently, state-of-the-art two-stage 3D object detectors have exhibited promising performance. However, these methods refine proposals individually, ignoring the rich contextual information in the object relationships between the neighbor proposals. In this study, we introduce an object relation module, consisting of a graph generator and a graph neural network (GNN), to learn the spatial information from certain patterns to improve 3D object detection. Specifically, we create an inter-object relationship graph based on proposals in a frame via the graph generator to connect each proposal with its neighbor proposals. Afterward, the GNN module extracts edge features from the generated graph and iteratively refines proposal features with the captured edge features. Ultimately, we leverage the refined features as input to the detection head to obtain detection results. Our approach improves upon the baseline PV-RCNN on the KITTI validation set for the car class across easy, moderate, and hard difficulty levels by 0.82%, 0.74%, and 0.58%, respectively. Additionally, our method outperforms the baseline by more than 1% under the moderate and hard levels BEV AP on the test server.
AdaIR: Adaptive All-in-One Image Restoration via Frequency Mining and Modulation
Mar 21, 2024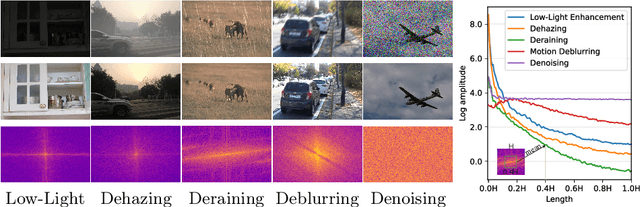
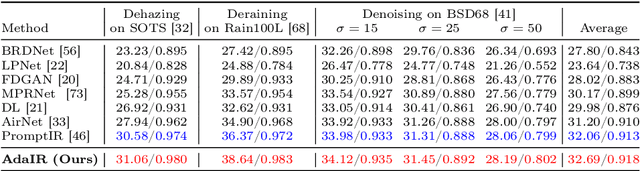
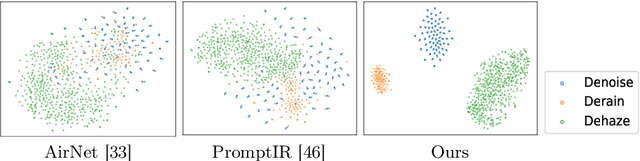

In the image acquisition process, various forms of degradation, including noise, haze, and rain, are frequently introduced. These degradations typically arise from the inherent limitations of cameras or unfavorable ambient conditions. To recover clean images from degraded versions, numerous specialized restoration methods have been developed, each targeting a specific type of degradation. Recently, all-in-one algorithms have garnered significant attention by addressing different types of degradations within a single model without requiring prior information of the input degradation type. However, these methods purely operate in the spatial domain and do not delve into the distinct frequency variations inherent to different degradation types. To address this gap, we propose an adaptive all-in-one image restoration network based on frequency mining and modulation. Our approach is motivated by the observation that different degradation types impact the image content on different frequency subbands, thereby requiring different treatments for each restoration task. Specifically, we first mine low- and high-frequency information from the input features, guided by the adaptively decoupled spectra of the degraded image. The extracted features are then modulated by a bidirectional operator to facilitate interactions between different frequency components. Finally, the modulated features are merged into the original input for a progressively guided restoration. With this approach, the model achieves adaptive reconstruction by accentuating the informative frequency subbands according to different input degradations. Extensive experiments demonstrate that the proposed method achieves state-of-the-art performance on different image restoration tasks, including denoising, dehazing, deraining, motion deblurring, and low-light image enhancement. Our code is available at https://github.com/c-yn/AdaIR.
A Survey on Autonomous Driving Datasets: Data Statistic, Annotation, and Outlook
Jan 02, 2024



Autonomous driving has rapidly developed and shown promising performance with recent advances in hardware and deep learning methods. High-quality datasets are fundamental for developing reliable autonomous driving algorithms. Previous dataset surveys tried to review the datasets but either focused on a limited number or lacked detailed investigation of the characters of datasets. To this end, we present an exhaustive study of over 200 autonomous driving datasets from multiple perspectives, including sensor modalities, data size, tasks, and contextual conditions. We introduce a novel metric to evaluate the impact of each dataset, which can also be a guide for establishing new datasets. We further analyze the annotation process and quality of datasets. Additionally, we conduct an in-depth analysis of the data distribution of several vital datasets. Finally, we discuss the development trend of the future autonomous driving datasets.