 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerchMobi^3: A Multi-Modal Robot with Power-Reuse Quad-Fan Mechanism for Air-Ground-Wall Locomotion
Sep 16, 2025Achieving seamless integration of aerial flight, ground driving, and wall climbing within a single robotic platform remains a major challenge, as existing designs often rely on additional adhesion actuators that increase complexity, reduce efficiency, and compromise reliability. To address these limitations, we present PerchMobi^3, a quad-fan, negative-pressure, air-ground-wall robot that implements a propulsion-adhesion power-reuse mechanism. By repurposing four ducted fans to simultaneously provide aerial thrust and negative-pressure adhesion, and integrating them with four actively driven wheels, PerchMobi^3 eliminates dedicated pumps while maintaining a lightweight and compact design. To the best of our knowledge, this is the first quad-fan prototype to demonstrate functional power reuse for multi-modal locomotion. A modeling and control framework enables coordinated operation across ground, wall, and aerial domains with fan-assisted transitions. The feasibility of the design is validated through a comprehensive set of experiments covering ground driving, payload-assisted wall climbing, aerial flight, and cross-mode transitions, demonstrating robust adaptability across locomotion scenarios. These results highlight the potential of PerchMobi^3 as a novel design paradigm for multi-modal robotic mobility, paving the way for future extensions toward autonomous and application-oriented deployment.
Construction of a Multiple-DOF Under-actuated Gripper with Force-Sensing via Deep Learning
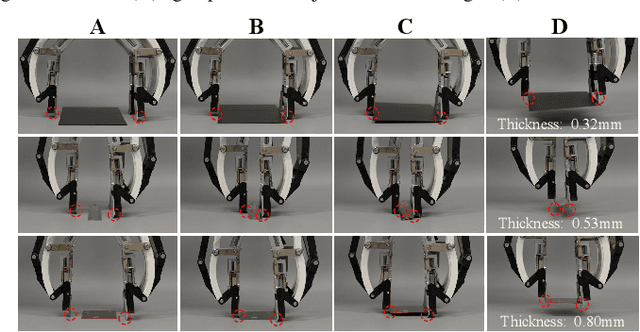
Jun 13, 2025We present a novel under-actuated gripper with two 3-joint fingers, which realizes force feedback control by the deep learning technique- Long Short-Term Memory (LSTM) model, without any force sensor. First, a five-linkage mechanism stacked by double four-linkages is designed as a finger to automatically achieve the transformation between parallel and enveloping grasping modes. This enables the creation of a low-cost under-actuated gripper comprising a single actuator and two 3-phalange fingers. Second, we devise theoretical models of kinematics and power transmission based on the proposed gripper, accurately obtaining fingertip positions and contact forces. Through coupling and decoupling of five-linkage mechanisms, the proposed gripper offers the expected capabilities of grasping payload/force/stability and objects with large dimension ranges. Third, to realize the force control, an LSTM model is proposed to determine the grasping mode for synthesizing force-feedback control policies that exploit contact sensing after outlining the uncertainty of currents using a statistical method. Finally, a series of experiments are implemented to measure quantitative indicators, such as the payload, grasping force, force sensing, grasping stability and the dimension ranges of objects to be grasped. Additionally, the grasping performance of the proposed gripper is verified experimentally to guarantee the high versatility and robustness of the proposed gripper.
Bridging VLM and KMP: Enabling Fine-grained robotic manipulation via Semantic Keypoints Representation
Mar 04, 2025
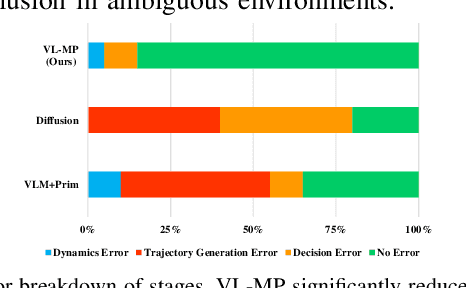
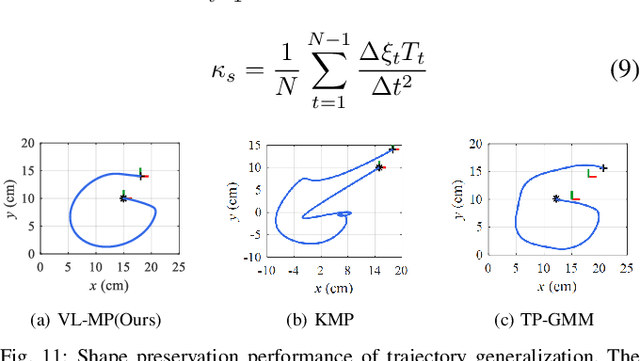
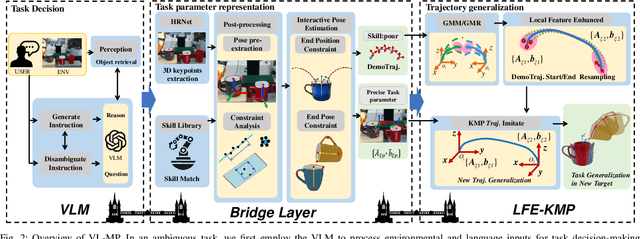
From early Movement Primitive (MP) techniques to modern Vision-Language Models (VLMs), autonomous manipulation has remained a pivotal topic in robotics. As two extremes, VLM-based methods emphasize zero-shot and adaptive manipulation but struggle with fine-grained planning. In contrast, MP-based approaches excel in precise trajectory generalization but lack decision-making ability. To leverage the strengths of the two frameworks, we propose VL-MP, which integrates VLM with Kernelized Movement Primitives (KMP) via a low-distortion decision information transfer bridge, enabling fine-grained robotic manipulation under ambiguous situations. One key of VL-MP is the accurate representation of task decision parameters through semantic keypoints constraints, leading to more precise task parameter generation. Additionally, we introduce a local trajectory feature-enhanced KMP to support VL-MP, thereby achieving shape preservation for complex trajectories. Extensive experiments conducted in complex real-world environments validate the effectiveness of VL-MP for adaptive and fine-grained manipulation.
Diffusion-Based mmWave Radar Point Cloud Enhancement Driven by Range Images
Mar 04, 2025Millimeter-wave (mmWave) radar has attracted significant attention in robotics and autonomous driving. However, despite the perception stability in harsh environments, the point cloud generated by mmWave radar is relatively sparse while containing significant noise, which limits its further development. Traditional mmWave radar enhancement approaches often struggle to leverage the effectiveness of diffusion models in super-resolution, largely due to the unnatural range-azimuth heatmap (RAH) or bird's eye view (BEV) representation. To overcome this limitation, we propose a novel method that pioneers the application of fusing range images with image diffusion models, achieving accurate and dense mmWave radar point clouds that are similar to LiDAR. Benefitting from the projection that aligns with human observation, the range image representation of mmWave radar is close to natural images, allowing the knowledge from pre-trained image diffusion models to be effectively transferred, significantly improving the overall performance. Extensive evaluations on both public datasets and self-constructed datasets demonstrate that our approach provides substantial improvements, establishing a new state-of-the-art performance in generating truly three-dimensional LiDAR-like point clouds via mmWave radar.
The Stiffness of 3-PRS PM Across Parasitic and Orientational Workspace
May 14, 2024This study investigates the stiffness characteristics of the Sprint Z3 head, also known as 3-PRS Parallel Kinematics Machines, which are among the most extensively researched and viably successful manipulators for precision machining applications. Despite the wealth of research on these robotic manipulators, no previous work has demonstrated their stiffness performance within the parasitic motion space. Such an undesired motion influences their stiffness properties, as stiffness is configuration-dependent. Addressing this gap, this paper develops a stiffness model that accounts for both the velocity-level parasitic motion space and the regular workspace. Numerical simulations are provided to illustrate the stiffness characteristics of the manipulator across all considered spaces. The results indicate that the stiffness profile within the parasitic motion space is both shallower and the values are smaller when compared to the stiffness distribution across the orientation workspace. This implies that evaluating a manipulator's performance adequately requires assessing its ability to resist external loads during parasitic motion. Therefore, comprehending this aspect is crucial for redesigning components to enhance overall stiffness.
Under-actuated Robotic Gripper with Multiple Grasping Modes Inspired by Human Finger
Mar 19, 2024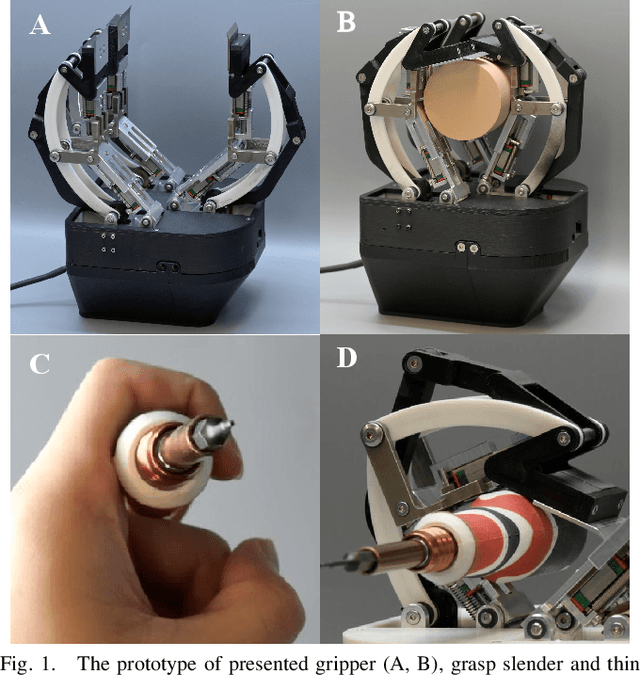
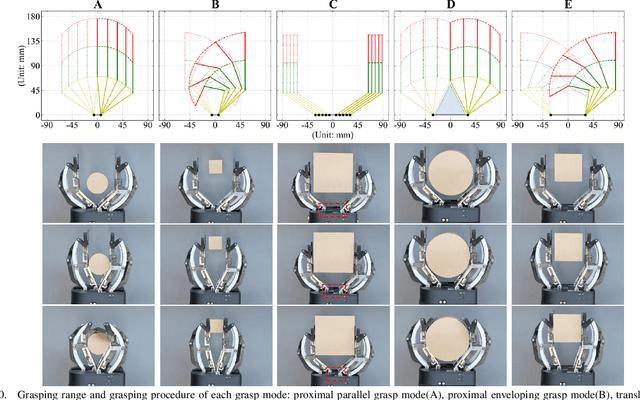

Under-actuated robot grippers as a pervasive tool of robots have become a considerable research focus. Despite their simplicity of mechanical design and control strategy, they suffer from poor versatility and weak adaptability, making widespread applications limited. To better relieve relevant research gaps, we present a novel 3-finger linkage-based gripper that realizes retractable and reconfigurable multi-mode grasps driven by a single motor. Firstly, inspired by the changes that occurred in the contact surface with a human finger moving, we artfully design a slider-slide rail mechanism as the phalanx to achieve retraction of each finger, allowing for better performance in the enveloping grasping mode. Secondly, a reconfigurable structure is constructed to broaden the grasping range of objects' dimensions for the proposed gripper. By adjusting the configuration and gesture of each finger, the gripper can achieve five grasping modes. Thirdly, the proposed gripper is just actuated by a single motor, yet it can be capable of grasping and reconfiguring simultaneously. Finally, various experiments on grasps of slender, thin, and large-volume objects are implemented to evaluate the performance of the proposed gripper in practical scenarios, which demonstrates the excellent grasping capabilities of the gripper.
Unveiling the Complete Variant of Spherical Robots
Mar 06, 2024
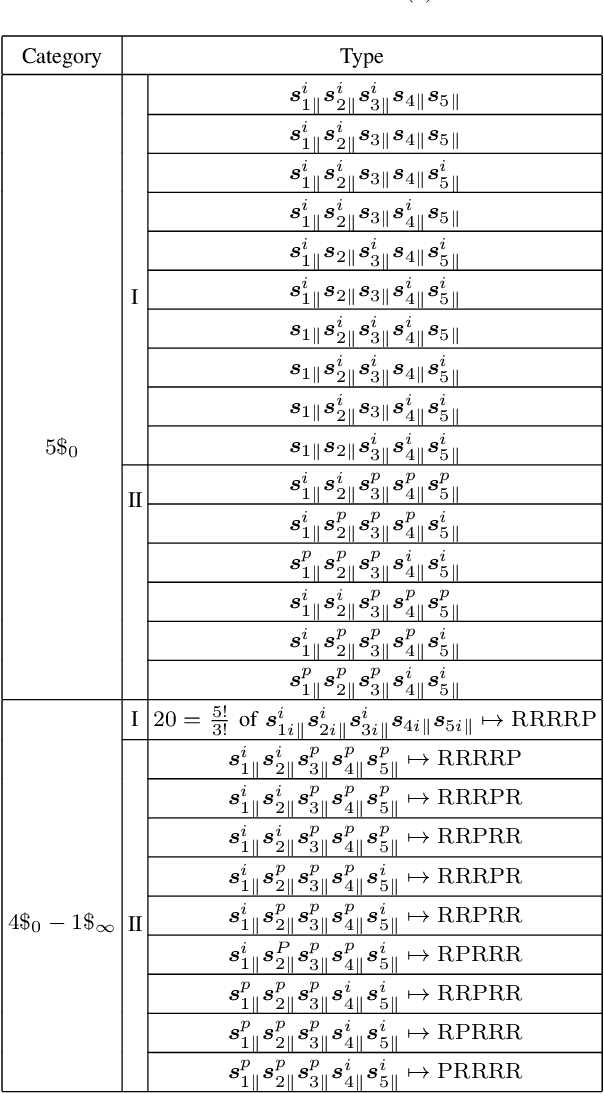
This study presents a systematic enumeration of spherical ($SO(3)$) type parallel robots' variants using an analytical velocity-level approach. These robots are known for their ability to perform arbitrary rotations around a fixed point, making them suitable for numerous applications. Despite their architectural diversity, existing research has predominantly approached them on a case-by-case basis. This approach hinders the exploration of all possible variants, thereby limiting the benefits derived from architectural diversity. By employing a generalized analytical approach through the reciprocal screw method, we systematically explore all the kinematic conditions for limbs yielding $SO(3)$ motion.Consequently, all 73 possible types of non-redundant limbs suitable for generating the target $SO(3)$ motion are identified. The approach involves performing an in-depth algebraic motion-constraint analysis and identifying common characteristics among different variants. This leads us to systematically explore all 73 symmetric and 5256 asymmetric variants, which in turn become a total of 5329, each potentially having different workspace capability, stiffness performance, and dynamics. Hence, having all these variants can facilitate the innovation of novel spherical robots and help us easily find the best and optimal ones for our specific applications.
CapsuleBot: A Novel Compact Hybrid Aerial-Ground Robot with Two Actuated-wheel-rotors
Sep 17, 2023This paper presents the design, modeling, and experimental validation of CapsuleBot, a compact hybrid aerial-ground vehicle designed for long-term covert reconnaissance. CapsuleBot combines the manoeuvrability of bicopter in the air with the energy efficiency and noise reduction of ground vehicles on the ground. To accomplish this, a structure named actuated-wheel-rotor has been designed, utilizing a sole motor for both the unilateral rotor tilting in the bicopter configuration and the wheel movement in ground mode. CapsuleBot comes equipped with two of these structures, enabling it to attain hybrid aerial-ground propulsion with just four motors. Importantly, the decoupling of motion modes is achieved without the need for additional drivers, enhancing the versatility and robustness of the system. Furthermore, we have designed the full dynamics and control for aerial and ground locomotion based on the bicopter model and the two-wheeled self-balancing vehicle model. The performance of CapsuleBot has been validated through experiments. The results demonstrate that CapsuleBot produces 40.53% less noise in ground mode and consumes 99.35% less energy, highlighting its potential for long-term covert reconnaissance applications.
Roller-Quadrotor: A Novel Hybrid Terrestrial/Aerial Quadrotor with Unicycle-Driven and Rotor-Assisted Turning
Mar 02, 2023



Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle. This work presents the design, modeling, and experimental validation of Roller-Quadrotor. Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode. This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows to through special terrain, such as narrow gaps. It also solves the obstacle avoidance challenge faced by terrestrial robots by flying. We design the models and controllers for the vehicle. The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying. These results demonstrate the feasibility and effectiveness of the structure and control in rolling through special terrain and energy saving.
Catch Planner: Catching High-Speed Targets in the Flight
Feb 09, 2023



Catching high-speed targets in the flight is a complex and typical highly dynamic task. In this paper, we propose Catch Planner, a planning-with-decision scheme for catching. For sequential decision making, we propose a policy search method based on deep reinforcement learning. In order to make catching adaptive and flexible, we propose a trajectory optimization method to jointly optimize the highly coupled catching time and terminal state while considering the dynamic feasibility and safety. We also propose a flexible constraint transcription method to catch targets at any reasonable attitude and terminal position bias. The proposed Catch Planner provides a new paradigm for the combination of learning and planning and is integrated on the quadrotor designed by ourselves, which runs at 100$hz$ on the onboard computer. Extensive experiments are carried out in real and simulated scenes to verify the robustness of the proposed method and its expansibility when facing a variety of high-speed flying targets.