 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Exoskeleton Kinematic Calibration to Improve Hand Tracking for Dexterous Teleoperation
Jul 31, 2025Hand exoskeletons are critical tools for dexterous teleoperation and immersive manipulation interfaces, but achieving accurate hand tracking remains a challenge due to user-specific anatomical variability and donning inconsistencies. These issues lead to kinematic misalignments that degrade tracking performance and limit applicability in precision tasks. We propose a subject-specific calibration framework for exoskeleton-based hand tracking that uses redundant joint sensing and a residual-weighted optimization strategy to estimate virtual link parameters. Implemented on the Maestro exoskeleton, our method improves joint angle and fingertip position estimation across users with varying hand geometries. We introduce a data-driven approach to empirically tune cost function weights using motion capture ground truth, enabling more accurate and consistent calibration across participants. Quantitative results from seven subjects show substantial reductions in joint and fingertip tracking errors compared to uncalibrated and evenly weighted models. Qualitative visualizations using a Unity-based virtual hand further confirm improvements in motion fidelity. The proposed framework generalizes across exoskeleton designs with closed-loop kinematics and minimal sensing, and lays the foundation for high-fidelity teleoperation and learning-from-demonstration applications.
Incrementally Stochastic and Accelerated Gradient Information mixed Optimization for Manipulator Motion Planning
Aug 21, 2021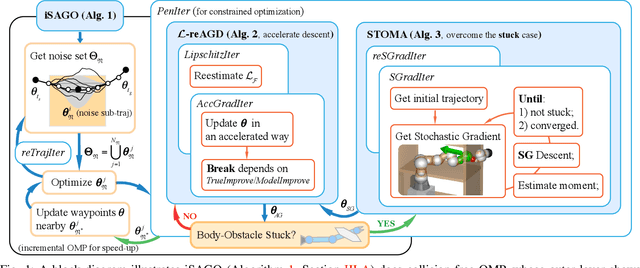
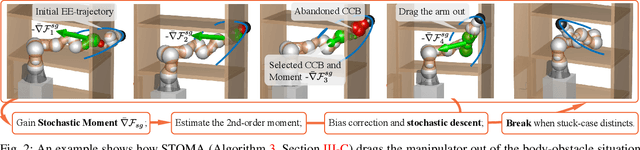


This paper introduces a novel motion planning algorithm, incrementally stochastic and accelerated gradient information mixed optimization (iSAGO), for robotic manipulators in a narrow workspace. Primarily, we propose the overall scheme of iSAGO integrating the accelerated and stochastic gradient information for efficient descent in the penalty method. In the stochastic part, we generate the adaptive stochastic moment via the random selection of collision checkboxes, interval time-series, and penalty factor based on Adam to solve the body-obstacle stuck case. Due to the slow convergence of STOMA, we integrate the accelerated gradient and stimulate the descent rate in a Lipschitz constant reestimation framework. Moreover, we introduce the Bayesian tree inference (BTI) method, transforming the whole trajectory optimization (SAGO) into an incremental sub-trajectory optimization (iSAGO) to improve the computational efficiency and success rate. Finally, we demonstrate the key coefficient tuning, benchmark iSAGO against other planners (CHOMP, GPMP2, TrajOpt, STOMP, and RRT-Connect), and implement iSAGO on AUBO-i5 in a storage shelf. The result shows the highest success rate and moderate solving efficiency of iSAGO.