 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDelta6: A Low-Cost, 6-DOF Force-Sensing Flexible End-Effector
Apr 07, 2026This paper presents Delta6, a low-cost, six-degree-of-freedom (6-DOF) force/torque end-effector that combines antagonistic springs with magnetic encoders to deliver accurate wrench sensing while remaining as simple to assemble as flat-pack furniture. A fully 3D-printed prototype, assembled entirely from off-the-shelf parts, withstands peak forces above +/-14.4 N and torques of +/-0.33 N.m per axis; these limits can be further extended by leveraging the proposed parametric analytical model. Without calibration, Delta6 attains a 99th-percentile error of 7% full scale (FS). With lightweight sequence models, the error is reduced to 3.8% FS by the best-performing network. Benchmarks on multiple computing platforms confirm that the device's bandwidth is adjustable, enabling balanced trade-offs among update rate, accuracy, and cost, while durability, thermal drift, and zero-calibration tests confirm its robustness. With Delta6 mounted on a robot arm governed by a force-impedance controller, the system successfully performs two contact-rich tasks: buffing curved surfaces and tight assemblies. Experiments validate the design, showing that Delta6 is a robust, low-cost alternative to existing 6-DOF force sensing solutions. Open-source site: https://wings-robotics.github.io/delta6 .
TacMamba: A Tactile History Compression Adapter Bridging Fast Reflexes and Slow VLA Reasoning
Mar 02, 2026In visually ambiguous manipulation such as detecting button click tactile feedback is often the sole source of ground truth. However, fusing tactile data poses a significant challenge due to a spatiotemporal mismatch: tactile perception requires high-frequency processing with long-horizon memory (System 1), whereas visual policies operate at low control frequencies (System 2). Existing architectures struggle to bridge this gap: Transformers are computationally prohibitive for high-frequency loops (>100Hz), while LSTMs suffer from forgetting over extended interaction histories. In this paper, we introduce TacMamba, a hierarchical architecture that aligns high-bandwidth tactile reflexes with low-frequency visual planning. Our approach comprises three core contributions: (1) a custom high-frequency tactile interface designed for flexible integration; (2) a Mamba-based Tactile History Compressor that encodes continuous force history into a compact state with O(1) inference latency (0.45 ms), enabling plug-and-play fusion with VLA models without joint pre-training and (3) a Tactile-Guided Dual-Stage Training strategy that leverages temporal discrimination for self-supervised representation learning and phase-uniform sampling to mitigate data sparsity. Experiments on discrete counting and implicit state switching demonstrate that TacMamba achieves 100% success rates, significantly outperforming the visual-only pi_0.5 baseline, while strictly satisfying hard real-time constraints.
IG-RFT: An Interaction-Guided RL Framework for VLA Models in Long-Horizon Robotic Manipulation
Feb 24, 2026Vision-Language-Action (VLA) models have demonstrated significant potential for generalist robotic policies; however, they struggle to generalize to long-horizon complex tasks in novel real-world domains due to distribution shifts and the scarcity of high-quality demonstrations. Although reinforcement learning (RL) offers a promising avenue for policy improvement, applying it to real-world VLA fine-tuning faces challenges regarding exploration efficiency, training stability, and sample cost. To address these issues, we propose IG-RFT, a novel Interaction-Guided Reinforced Fine-Tuning system designed for flow-based VLA models. Firstly, to facilitate effective policy optimization, we introduce Interaction-Guided Advantage Weighted Regression (IG-AWR), an RL algorithm that dynamically modulates exploration intensity based on the robot's interaction status. Furthermore, to address the limitations of sparse or task-specific rewards, we design a novel hybrid dense reward function that integrates the trajectory-level reward and the subtask-level reward. Finally, we construct a three-stage RL system comprising SFT, Offline RL, and Human-in-the-Loop RL for fine-tuning VLA models. Extensive real-world experiments on four challenging long-horizon tasks demonstrate that IG-RFT achieves an average success rate of 85.0%, significantly outperforming SFT (18.8%) and standard Offline RL baselines (40.0%). Ablation studies confirm the critical contributions of IG-AWR and hybrid reward shaping. In summary, our work establishes and validates a novel reinforced fine-tuning system for VLA models in real-world robotic manipulation.
Construction of a Multiple-DOF Under-actuated Gripper with Force-Sensing via Deep Learning
Jun 13, 2025We present a novel under-actuated gripper with two 3-joint fingers, which realizes force feedback control by the deep learning technique- Long Short-Term Memory (LSTM) model, without any force sensor. First, a five-linkage mechanism stacked by double four-linkages is designed as a finger to automatically achieve the transformation between parallel and enveloping grasping modes. This enables the creation of a low-cost under-actuated gripper comprising a single actuator and two 3-phalange fingers. Second, we devise theoretical models of kinematics and power transmission based on the proposed gripper, accurately obtaining fingertip positions and contact forces. Through coupling and decoupling of five-linkage mechanisms, the proposed gripper offers the expected capabilities of grasping payload/force/stability and objects with large dimension ranges. Third, to realize the force control, an LSTM model is proposed to determine the grasping mode for synthesizing force-feedback control policies that exploit contact sensing after outlining the uncertainty of currents using a statistical method. Finally, a series of experiments are implemented to measure quantitative indicators, such as the payload, grasping force, force sensing, grasping stability and the dimension ranges of objects to be grasped. Additionally, the grasping performance of the proposed gripper is verified experimentally to guarantee the high versatility and robustness of the proposed gripper.
Histogram Transporter: Learning Rotation-Equivariant Orientation Histograms for High-Precision Robotic Kitting
Mar 16, 2025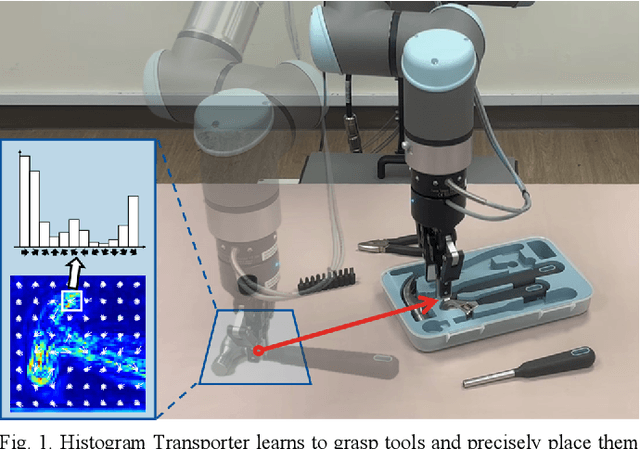



Robotic kitting is a critical task in industrial automation that requires the precise arrangement of objects into kits to support downstream production processes. However, when handling complex kitting tasks that involve fine-grained orientation alignment, existing approaches often suffer from limited accuracy and computational efficiency. To address these challenges, we propose Histogram Transporter, a novel kitting framework that learns high-precision pick-and-place actions from scratch using only a few demonstrations. First, our method extracts rotation-equivariant orientation histograms (EOHs) from visual observations using an efficient Fourier-based discretization strategy. These EOHs serve a dual purpose: improving picking efficiency by directly modeling action success probabilities over high-resolution orientations and enhancing placing accuracy by serving as local, discriminative feature descriptors for object-to-placement matching. Second, we introduce a subgroup alignment strategy in the place model that compresses the full spectrum of EOHs into a compact orientation representation, enabling efficient feature matching while preserving accuracy. Finally, we examine the proposed framework on the simulated Hand-Tool Kitting Dataset (HTKD), where it outperforms competitive baselines in both success rates and computational efficiency. Further experiments on five Raven-10 tasks exhibits the remarkable adaptability of our approach, with real-robot trials confirming its applicability for real-world deployment.
GelSight FlexiRay: Breaking Planar Limits by Harnessing Large Deformations for Flexible,Full-Coverage Multimodal Sensing
Nov 28, 2024



The integration of tactile sensing into compliant soft robotic grippers offers a compelling pathway toward advanced robotic grasping and safer human-robot interactions. Visual-tactile sensors realize high-resolution, large-area tactile perception with affordable cameras. However, conventional visual-tactile sensors rely heavily on rigid forms, sacrificing finger compliance and sensing regions to achieve localized tactile feedback. Enabling seamless, large-area tactile sensing in soft grippers remains challenging, as deformations inherent to soft structures can obstruct the optical path and restrict the camera's field of view. To address these, we present Gelsight FlexiRay, a multimodal visual-tactile sensor designed for safe and compliant interactions with substantial structural deformation through integration with Finray Effect grippers. First, we adopt a multi-mirror configuration, which is systematically modeled and optimized based on the physical force-deformation characteristics of FRE grippers. Second, we enhanced Gelsight FlexiRay with human-like multimodal perception, including contact force and location, proprioception, temperature, texture, and slippage. Experiments demonstrate Gelsight FlexiRay's robust tactile performance across diverse deformation states, achieving a force measurement accuracy of 0.14 N and proprioceptive positioning accuracy of 0.19 mm. Compared with state of art compliant VTS, the FlexiRay demonstrates 5 times larger structural deformation under the same loads. Its expanded sensing area and ability to distinguish contact information and execute grasping and classification tasks highlights its potential for versatile, large-area multimodal tactile sensing integration within soft robotic systems. This work establishes a foundation for flexible, high-resolution tactile sensing in compliant robotic applications.
Discretizing SO(2)-Equivariant Features for Robotic Kitting
Mar 20, 2024Robotic kitting has attracted considerable attention in logistics and industrial settings. However, existing kitting methods encounter challenges such as low precision and poor efficiency, limiting their widespread applications. To address these issues, we present a novel kitting framework that improves both the precision and computational efficiency of complex kitting tasks. Firstly, our approach introduces a fine-grained orientation estimation technique in the picking module, significantly enhancing orientation precision while effectively decoupling computational load from orientation granularity. This approach combines an SO(2)-equivariant network with a group discretization operation to preciously predict discrete orientation distributions. Secondly, we develop the Hand-tool Kitting Dataset (HKD) to evaluate the performance of different solutions in handling orientation-sensitive kitting tasks. This dataset comprises a diverse collection of hand tools and synthetically created kits, which reflects the complexities encountered in real-world kitting scenarios. Finally, a series of experiments are conducted to evaluate the performance of the proposed method. The results demonstrate that our approach offers remarkable precision and enhanced computational efficiency in robotic kitting tasks.
Bin Packing Optimization via Deep Reinforcement Learning
Mar 19, 2024The Bin Packing Problem (BPP) has attracted enthusiastic research interest recently, owing to widespread applications in logistics and warehousing environments. It is truly essential to optimize the bin packing to enable more objects to be packed into boxes. Object packing order and placement strategy are the two crucial optimization objectives of the BPP. However, existing optimization methods for BPP, such as the genetic algorithm (GA), emerge as the main issues in highly computational cost and relatively low accuracy, making it difficult to implement in realistic scenarios. To well relieve the research gaps, we present a novel optimization methodology of two-dimensional (2D)-BPP and three-dimensional (3D)-BPP for objects with regular shapes via deep reinforcement learning (DRL), maximizing the space utilization and minimizing the usage number of boxes. First, an end-to-end DRL neural network constructed by a modified Pointer Network consisting of an encoder, a decoder and an attention module is proposed to achieve the optimal object packing order. Second, conforming to the top-down operation mode, the placement strategy based on a height map is used to arrange the ordered objects in the boxes, preventing the objects from colliding with boxes and other objects in boxes. Third, the reward and loss functions are defined as the indicators of the compactness, pyramid, and usage number of boxes to conduct the training of the DRL neural network based on an on-policy actor-critic framework. Finally, a series of experiments are implemented to compare our method with conventional packing methods, from which we conclude that our method outperforms these packing methods in both packing accuracy and efficiency.
Under-actuated Robotic Gripper with Multiple Grasping Modes Inspired by Human Finger
Mar 19, 2024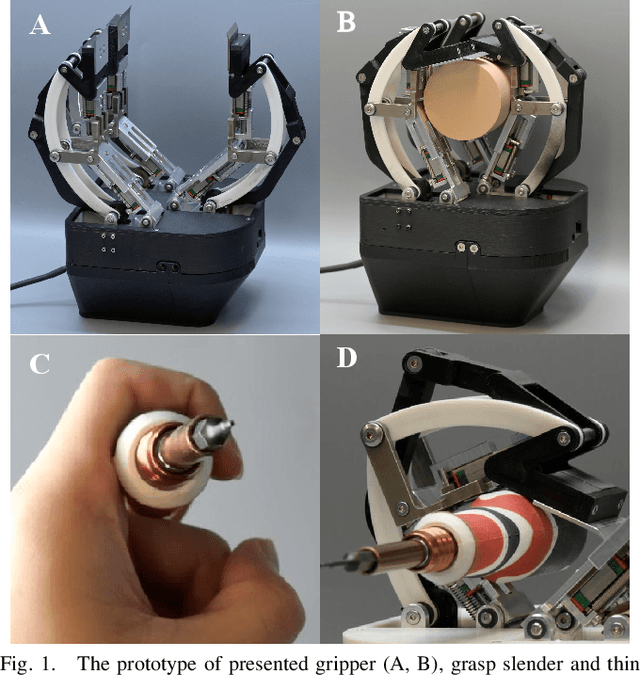
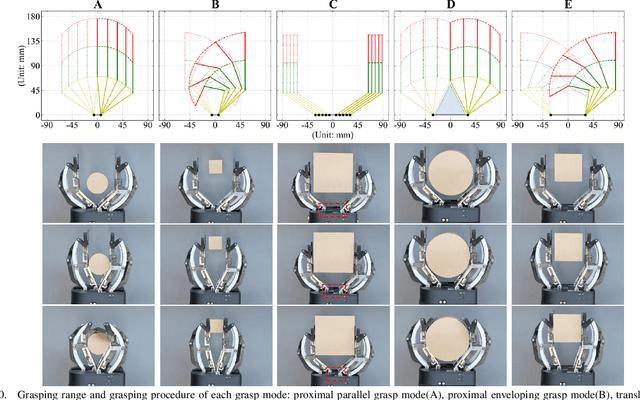

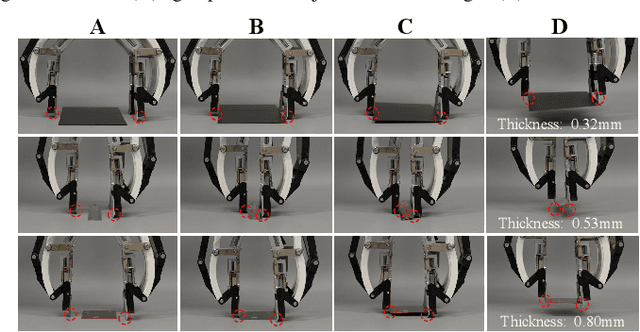
Under-actuated robot grippers as a pervasive tool of robots have become a considerable research focus. Despite their simplicity of mechanical design and control strategy, they suffer from poor versatility and weak adaptability, making widespread applications limited. To better relieve relevant research gaps, we present a novel 3-finger linkage-based gripper that realizes retractable and reconfigurable multi-mode grasps driven by a single motor. Firstly, inspired by the changes that occurred in the contact surface with a human finger moving, we artfully design a slider-slide rail mechanism as the phalanx to achieve retraction of each finger, allowing for better performance in the enveloping grasping mode. Secondly, a reconfigurable structure is constructed to broaden the grasping range of objects' dimensions for the proposed gripper. By adjusting the configuration and gesture of each finger, the gripper can achieve five grasping modes. Thirdly, the proposed gripper is just actuated by a single motor, yet it can be capable of grasping and reconfiguring simultaneously. Finally, various experiments on grasps of slender, thin, and large-volume objects are implemented to evaluate the performance of the proposed gripper in practical scenarios, which demonstrates the excellent grasping capabilities of the gripper.
Theoretical Modeling and Bio-inspired Trajectory Optimization of A Multiple-locomotion Origami Robot
Mar 19, 2024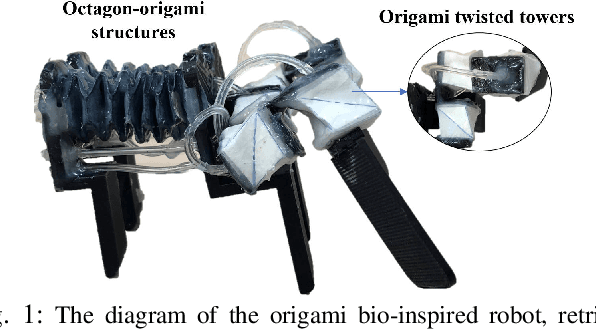

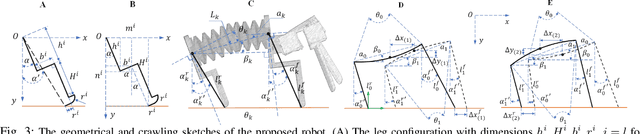
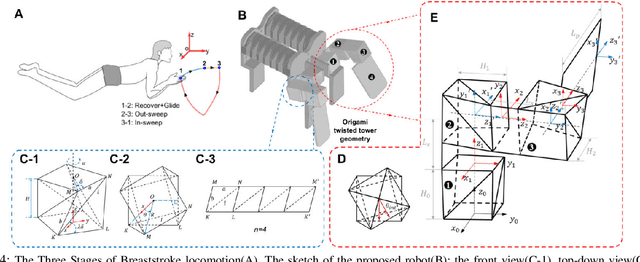
Recent research on mobile robots has focused on increasing their adaptability to unpredictable and unstructured environments using soft materials and structures. However, the determination of key design parameters and control over these compliant robots are predominantly iterated through experiments, lacking a solid theoretical foundation. To improve their efficiency, this paper aims to provide mathematics modeling over two locomotion, crawling and swimming. Specifically, a dynamic model is first devised to reveal the influence of the contact surfaces' frictional coefficients on displacements in different motion phases. Besides, a swimming kinematics model is provided using coordinate transformation, based on which, we further develop an algorithm that systematically plans human-like swimming gaits, with maximum thrust obtained. The proposed algorithm is highly generalizable and has the potential to be applied in other soft robots with multiple joints. Simulation experiments have been conducted to illustrate the effectiveness of the proposed modeling.