 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHistogram Transporter: Learning Rotation-Equivariant Orientation Histograms for High-Precision Robotic Kitting
Mar 16, 2025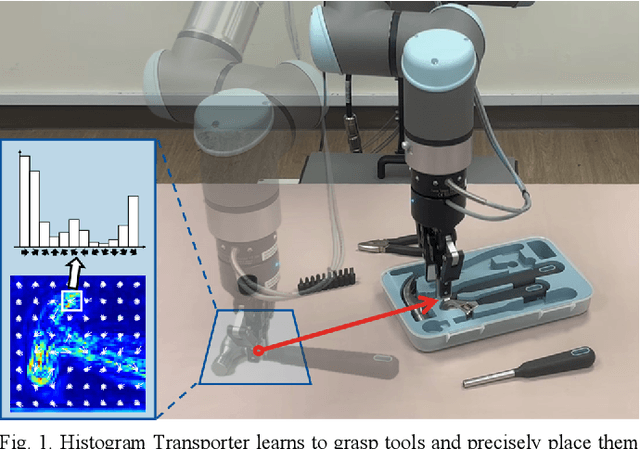



Robotic kitting is a critical task in industrial automation that requires the precise arrangement of objects into kits to support downstream production processes. However, when handling complex kitting tasks that involve fine-grained orientation alignment, existing approaches often suffer from limited accuracy and computational efficiency. To address these challenges, we propose Histogram Transporter, a novel kitting framework that learns high-precision pick-and-place actions from scratch using only a few demonstrations. First, our method extracts rotation-equivariant orientation histograms (EOHs) from visual observations using an efficient Fourier-based discretization strategy. These EOHs serve a dual purpose: improving picking efficiency by directly modeling action success probabilities over high-resolution orientations and enhancing placing accuracy by serving as local, discriminative feature descriptors for object-to-placement matching. Second, we introduce a subgroup alignment strategy in the place model that compresses the full spectrum of EOHs into a compact orientation representation, enabling efficient feature matching while preserving accuracy. Finally, we examine the proposed framework on the simulated Hand-Tool Kitting Dataset (HTKD), where it outperforms competitive baselines in both success rates and computational efficiency. Further experiments on five Raven-10 tasks exhibits the remarkable adaptability of our approach, with real-robot trials confirming its applicability for real-world deployment.
Few-shot Human Motion Recognition through Multi-Aspect mmWave FMCW Radar Data
Jan 19, 2025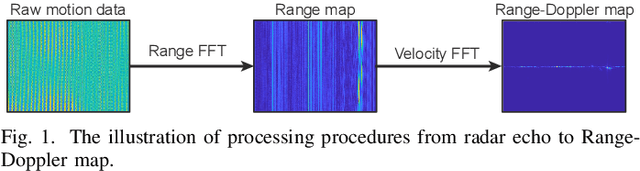
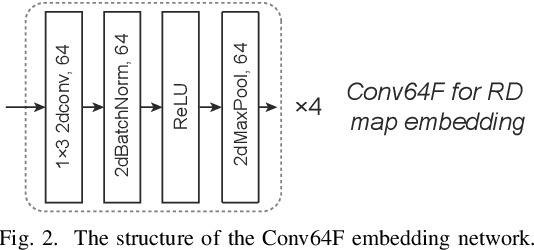
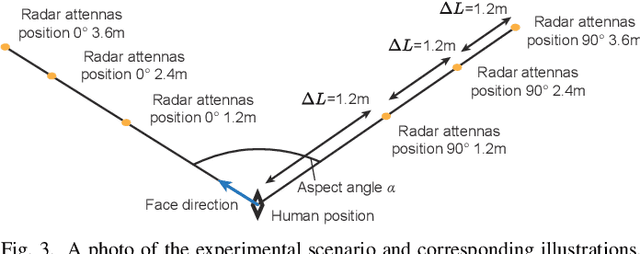
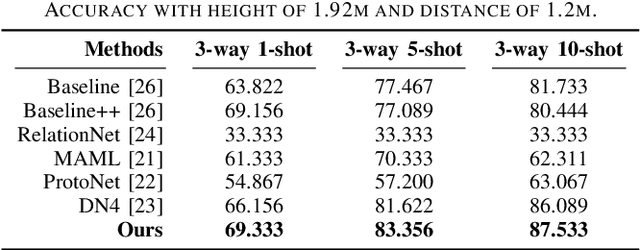
Radar human motion recognition methods based on deep learning models has been a heated spot of remote sensing in recent years, yet the existing methods are mostly radial-oriented. In practical application, the test data could be multi-aspect and the sample number of each motion could be very limited, causing model overfitting and reduced recognition accuracy. This paper proposed channel-DN4, a multi-aspect few-shot human motion recognition method. First, local descriptors are introduced for a precise classification metric. Moreover, episodic training strategy was adopted to reduce model overfitting. To utilize the invariant sematic information in multi-aspect conditions, we considered channel attention after the embedding network to obtain precise implicit high-dimensional representation of sematic information. We tested the performance of channel-DN4 and methods for comparison on measured mmWave FMCW radar data. The proposed channel-DN4 produced competitive and convincing results, reaching the highest 87.533% recognition accuracy in 3-way 10-shot condition while other methods suffer from overfitting. Codes are available at: https://github.com/MountainChenCad/channel-DN4
Discretizing SO(2)-Equivariant Features for Robotic Kitting
Mar 20, 2024Robotic kitting has attracted considerable attention in logistics and industrial settings. However, existing kitting methods encounter challenges such as low precision and poor efficiency, limiting their widespread applications. To address these issues, we present a novel kitting framework that improves both the precision and computational efficiency of complex kitting tasks. Firstly, our approach introduces a fine-grained orientation estimation technique in the picking module, significantly enhancing orientation precision while effectively decoupling computational load from orientation granularity. This approach combines an SO(2)-equivariant network with a group discretization operation to preciously predict discrete orientation distributions. Secondly, we develop the Hand-tool Kitting Dataset (HKD) to evaluate the performance of different solutions in handling orientation-sensitive kitting tasks. This dataset comprises a diverse collection of hand tools and synthetically created kits, which reflects the complexities encountered in real-world kitting scenarios. Finally, a series of experiments are conducted to evaluate the performance of the proposed method. The results demonstrate that our approach offers remarkable precision and enhanced computational efficiency in robotic kitting tasks.
Real-time Human-Robot Collaborative Manipulations of Cylindrical and Cubic Objects via Geometric Primitives and Depth Information
Jun 28, 2021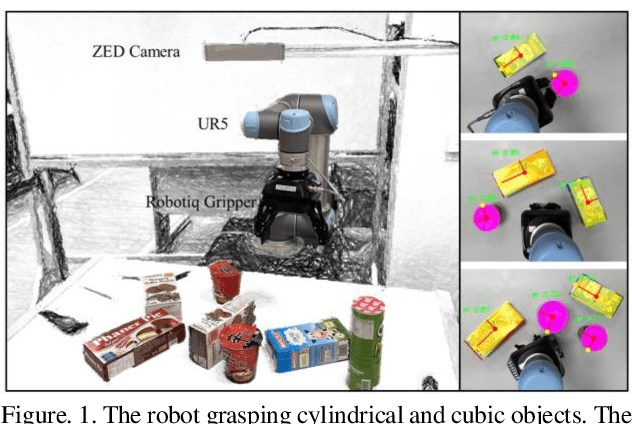
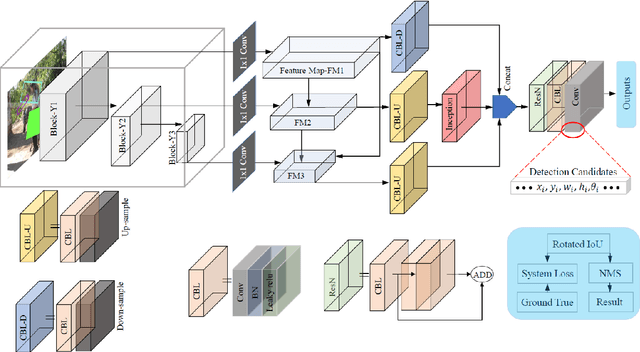
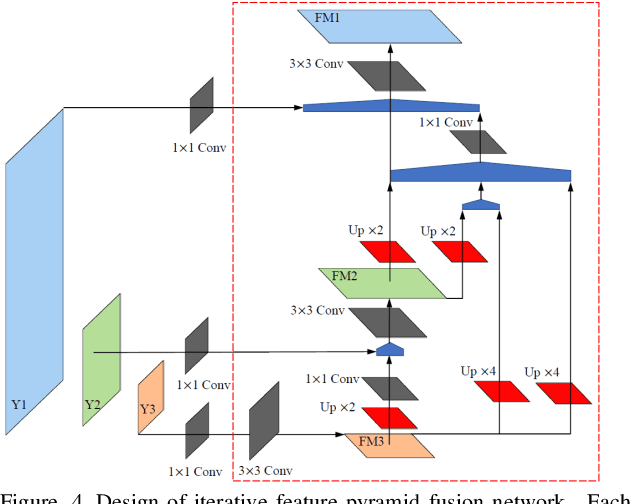
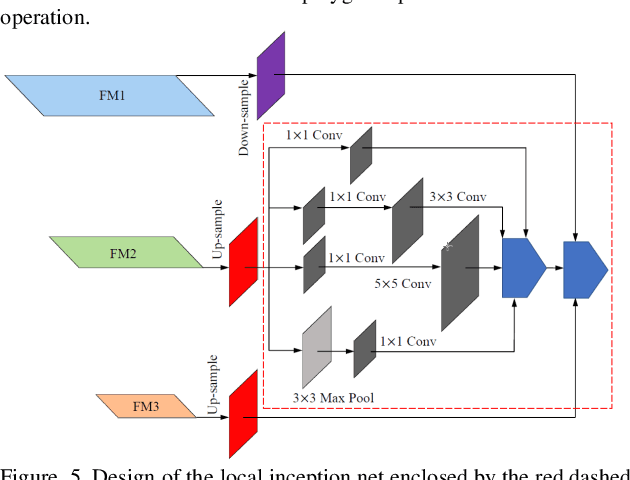
Many objects commonly found in household and industrial environments are represented by cylindrical and cubic shapes. Thus, it is available for robots to manipulate them through the real-time detection of elliptic and rectangle shape primitives formed by the circular and rectangle tops of these objects. We devise a robust grasping system that enables a robot to manipulate cylindrical and cubic objects in collaboration scenarios by the proposed perception strategy including the detection of elliptic and rectangle shape primitives and depth information. The proposed method of detecting ellipses and rectangles incorporates a one-stage detection backbone and then, accommodates the proposed adaptive multi-branch multi-scale net with a designed iterative feature pyramid network, local inception net, and multi-receptive-filed feature fusion net to generate object detection recommendations. In terms of manipulating objects with different shapes, we propose the grasp synthetic to align the grasp pose of the gripper with an object's pose based on the proposed detector and registered depth information. The proposed robotic perception algorithm has been integrated on a robot to demonstrate the ability to carry out human-robot collaborative manipulations of cylindrical and cubic objects in real-time. We show that the robotic manipulator, empowered by the proposed detector, performs well in practical manipulation scenarios.(An experiment video is available in YouTube, https://www.youtube.com/watch?v=Amcs8lwvNK8.)
Machine learning-guided synthesis of advanced inorganic materials
May 10, 2019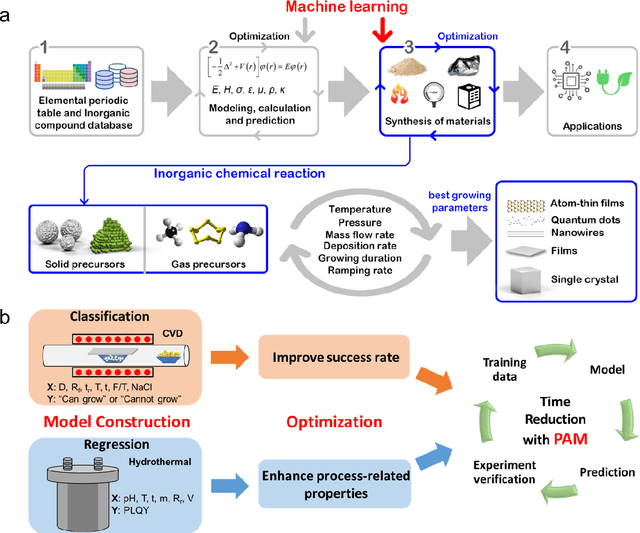
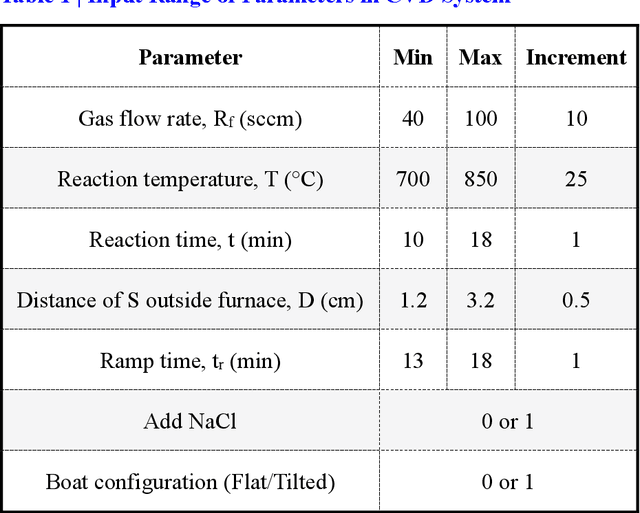
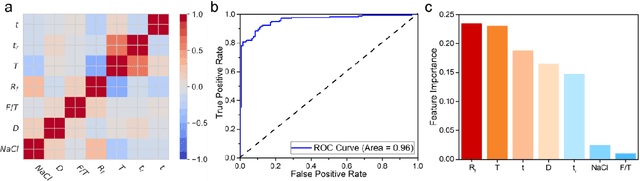
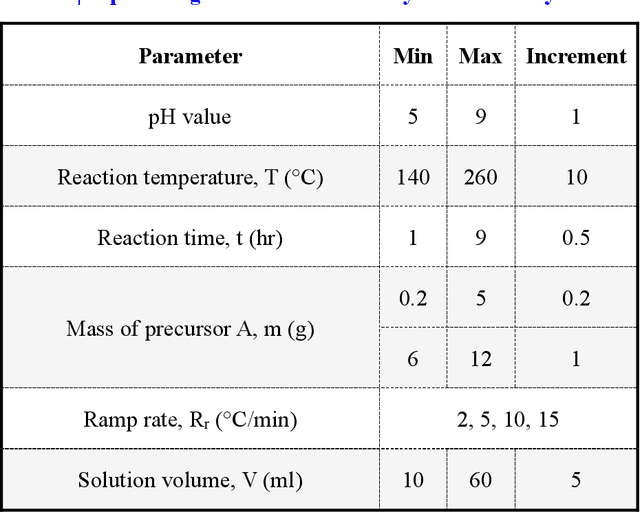
Synthesis of advanced inorganic materials with minimum number of trials is of paramount importance towards the acceleration of inorganic materials development. The enormous complexity involved in existing multi-variable synthesis methods leads to high uncertainty, numerous trials and exorbitant cost. Recently, machine learning (ML) has demonstrated tremendous potential for material research. Here, we report the application of ML to optimize and accelerate material synthesis process in two representative multi-variable systems. A classification ML model on chemical vapor deposition-grown MoS2 is established, capable of optimizing the synthesis conditions to achieve higher success rate. While a regression model is constructed on the hydrothermal-synthesized carbon quantum dots, to enhance the process-related properties such as the photoluminescence quantum yield. Progressive adaptive model is further developed, aiming to involve ML at the beginning stage of new material synthesis. Optimization of the experimental outcome with minimized number of trials can be achieved with the effective feedback loops. This work serves as proof of concept revealing the feasibility and remarkable capability of ML to facilitate the synthesis of inorganic materials, and opens up a new window for accelerating material development.