 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Human-Robot Collaborative Manipulations of Cylindrical and Cubic Objects via Geometric Primitives and Depth Information
Paper and Code
Jun 28, 2021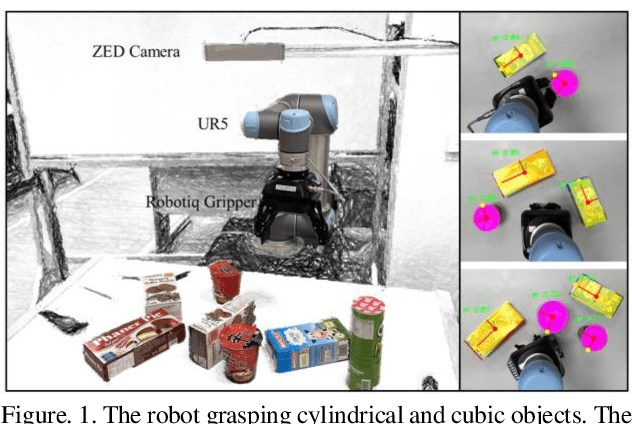
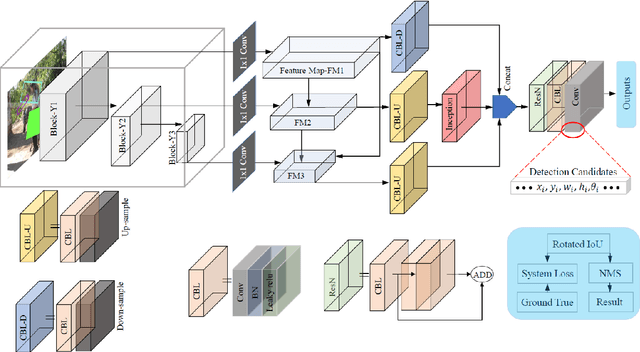
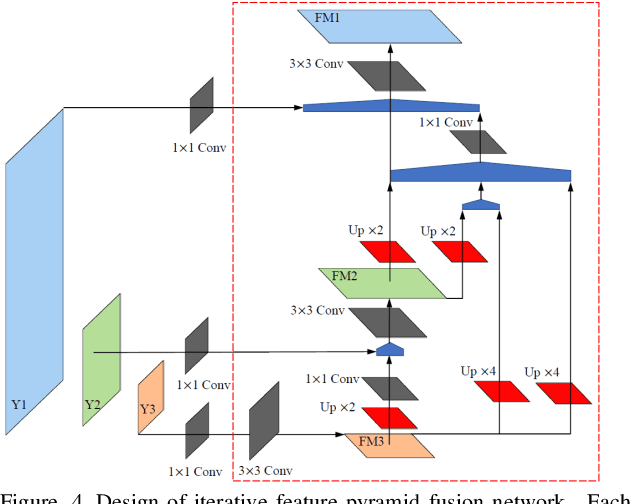
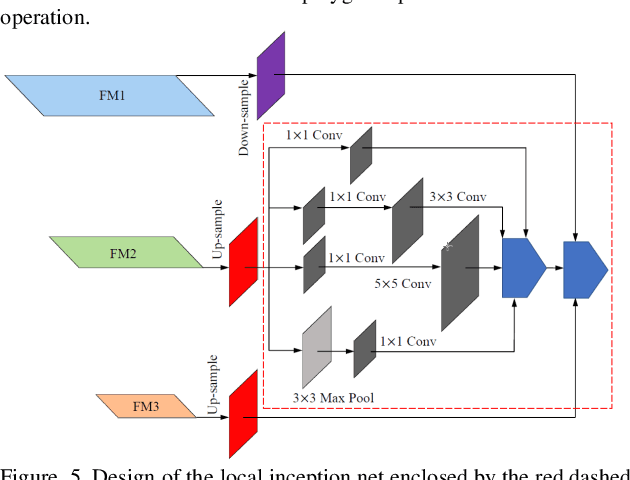
Many objects commonly found in household and industrial environments are represented by cylindrical and cubic shapes. Thus, it is available for robots to manipulate them through the real-time detection of elliptic and rectangle shape primitives formed by the circular and rectangle tops of these objects. We devise a robust grasping system that enables a robot to manipulate cylindrical and cubic objects in collaboration scenarios by the proposed perception strategy including the detection of elliptic and rectangle shape primitives and depth information. The proposed method of detecting ellipses and rectangles incorporates a one-stage detection backbone and then, accommodates the proposed adaptive multi-branch multi-scale net with a designed iterative feature pyramid network, local inception net, and multi-receptive-filed feature fusion net to generate object detection recommendations. In terms of manipulating objects with different shapes, we propose the grasp synthetic to align the grasp pose of the gripper with an object's pose based on the proposed detector and registered depth information. The proposed robotic perception algorithm has been integrated on a robot to demonstrate the ability to carry out human-robot collaborative manipulations of cylindrical and cubic objects in real-time. We show that the robotic manipulator, empowered by the proposed detector, performs well in practical manipulation scenarios.(An experiment video is available in YouTube, https://www.youtube.com/watch?v=Amcs8lwvNK8.)