 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD$^2$GSLAM: 4D Dynamic Gaussian Splatting SLAM
Dec 10, 2025Recent advances in Dense Simultaneous Localization and Mapping (SLAM) have demonstrated remarkable performance in static environments. However, dense SLAM in dynamic environments remains challenging. Most methods directly remove dynamic objects and focus solely on static scene reconstruction, which ignores the motion information contained in these dynamic objects. In this paper, we present D$^2$GSLAM, a novel dynamic SLAM system utilizing Gaussian representation, which simultaneously performs accurate dynamic reconstruction and robust tracking within dynamic environments. Our system is composed of four key components: (i) We propose a geometric-prompt dynamic separation method to distinguish between static and dynamic elements of the scene. This approach leverages the geometric consistency of Gaussian representation and scene geometry to obtain coarse dynamic regions. The regions then serve as prompts to guide the refinement of the coarse mask for achieving accurate motion mask. (ii) To facilitate accurate and efficient mapping of the dynamic scene, we introduce dynamic-static composite representation that integrates static 3D Gaussians with dynamic 4D Gaussians. This representation allows for modeling the transitions between static and dynamic states of objects in the scene for composite mapping and optimization. (iii) We employ a progressive pose refinement strategy that leverages both the multi-view consistency of static scene geometry and motion information from dynamic objects to achieve accurate camera tracking. (iv) We introduce a motion consistency loss, which leverages the temporal continuity in object motions for accurate dynamic modeling. Our D$^2$GSLAM demonstrates superior performance on dynamic scenes in terms of mapping and tracking accuracy, while also showing capability in accurate dynamic modeling.
Construction of a Multiple-DOF Under-actuated Gripper with Force-Sensing via Deep Learning
Jun 13, 2025We present a novel under-actuated gripper with two 3-joint fingers, which realizes force feedback control by the deep learning technique- Long Short-Term Memory (LSTM) model, without any force sensor. First, a five-linkage mechanism stacked by double four-linkages is designed as a finger to automatically achieve the transformation between parallel and enveloping grasping modes. This enables the creation of a low-cost under-actuated gripper comprising a single actuator and two 3-phalange fingers. Second, we devise theoretical models of kinematics and power transmission based on the proposed gripper, accurately obtaining fingertip positions and contact forces. Through coupling and decoupling of five-linkage mechanisms, the proposed gripper offers the expected capabilities of grasping payload/force/stability and objects with large dimension ranges. Third, to realize the force control, an LSTM model is proposed to determine the grasping mode for synthesizing force-feedback control policies that exploit contact sensing after outlining the uncertainty of currents using a statistical method. Finally, a series of experiments are implemented to measure quantitative indicators, such as the payload, grasping force, force sensing, grasping stability and the dimension ranges of objects to be grasped. Additionally, the grasping performance of the proposed gripper is verified experimentally to guarantee the high versatility and robustness of the proposed gripper.
Histogram Transporter: Learning Rotation-Equivariant Orientation Histograms for High-Precision Robotic Kitting
Mar 16, 2025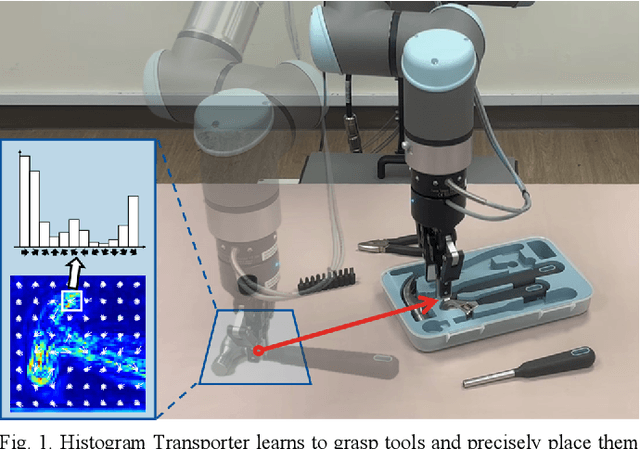



Robotic kitting is a critical task in industrial automation that requires the precise arrangement of objects into kits to support downstream production processes. However, when handling complex kitting tasks that involve fine-grained orientation alignment, existing approaches often suffer from limited accuracy and computational efficiency. To address these challenges, we propose Histogram Transporter, a novel kitting framework that learns high-precision pick-and-place actions from scratch using only a few demonstrations. First, our method extracts rotation-equivariant orientation histograms (EOHs) from visual observations using an efficient Fourier-based discretization strategy. These EOHs serve a dual purpose: improving picking efficiency by directly modeling action success probabilities over high-resolution orientations and enhancing placing accuracy by serving as local, discriminative feature descriptors for object-to-placement matching. Second, we introduce a subgroup alignment strategy in the place model that compresses the full spectrum of EOHs into a compact orientation representation, enabling efficient feature matching while preserving accuracy. Finally, we examine the proposed framework on the simulated Hand-Tool Kitting Dataset (HTKD), where it outperforms competitive baselines in both success rates and computational efficiency. Further experiments on five Raven-10 tasks exhibits the remarkable adaptability of our approach, with real-robot trials confirming its applicability for real-world deployment.
DSCformer: A Dual-Branch Network Integrating Enhanced Dynamic Snake Convolution and SegFormer for Crack Segmentation
Nov 14, 2024



In construction quality monitoring, accurately detecting and segmenting cracks in concrete structures is paramount for safety and maintenance. Current convolutional neural networks (CNNs) have demonstrated strong performance in crack segmentation tasks, yet they often struggle with complex backgrounds and fail to capture fine-grained tubular structures fully. In contrast, Transformers excel at capturing global context but lack precision in detailed feature extraction. We introduce DSCformer, a novel hybrid model that integrates an enhanced Dynamic Snake Convolution (DSConv) with a Transformer architecture for crack segmentation to address these challenges. Our key contributions include the enhanced DSConv through a pyramid kernel for adaptive offset computation and a simultaneous bi-directional learnable offset iteration, significantly improving the model's performance to capture intricate crack patterns. Additionally, we propose a Weighted Convolutional Attention Module (WCAM), which refines channel attention, allowing for more precise and adaptive feature attention. We evaluate DSCformer on the Crack3238 and FIND datasets, achieving IoUs of 59.22\% and 87.24\%, respectively. The experimental results suggest that our DSCformer outperforms state-of-the-art methods across different datasets.
Discretizing SO(2)-Equivariant Features for Robotic Kitting
Mar 20, 2024Robotic kitting has attracted considerable attention in logistics and industrial settings. However, existing kitting methods encounter challenges such as low precision and poor efficiency, limiting their widespread applications. To address these issues, we present a novel kitting framework that improves both the precision and computational efficiency of complex kitting tasks. Firstly, our approach introduces a fine-grained orientation estimation technique in the picking module, significantly enhancing orientation precision while effectively decoupling computational load from orientation granularity. This approach combines an SO(2)-equivariant network with a group discretization operation to preciously predict discrete orientation distributions. Secondly, we develop the Hand-tool Kitting Dataset (HKD) to evaluate the performance of different solutions in handling orientation-sensitive kitting tasks. This dataset comprises a diverse collection of hand tools and synthetically created kits, which reflects the complexities encountered in real-world kitting scenarios. Finally, a series of experiments are conducted to evaluate the performance of the proposed method. The results demonstrate that our approach offers remarkable precision and enhanced computational efficiency in robotic kitting tasks.
Theoretical Model Construction of Deformation-Force for Soft Grippers Part I: Co-rotational Modeling and Force Control for Design Optimization
Mar 23, 2023



Compliant grippers, owing to adaptivity and safety, have attracted considerable attention for unstructured grasping in real applications, such as industrial or logistic scenarios. However, accurate construction of the mathematical model depicting the bidirectional relationship between shape deformation and contact force for such grippers, such as the Fin-Ray grippers, remains stagnant to date. To address this research gap, this article devises, presents, and experimentally validates a universal bidirectional force-displacement mathematical model for compliant grippers based on the co-rotational concept, which endows such grippers with an intrinsic force sensing capability and offers a better insight into the design optimization. In Part 1 of the article, we introduce the fundamental theory of the co-rotational approach, where arbitrary large deformation of beam elements can be modeled. Its intrinsic principle enables the theoretical modeling to consider various types of configurations and key design parameters with very few assumptions made. Further, a force control algorithm is proposed, providing accurate displacement estimations of the gripper under external forces with minor computational loads. The performance of the proposed method is experimentally verified through comparison with Finite Element Analysis, where the influence of four key design parameters on the gripper s performance is investigated, facilitating systematical design optimization. Part 2 of this article demonstrating the force sensing capabilities and the effects of representative co-rotational modeling parameters on model accuracy is released in Google Drive.
Theoretical Model Construction of Deformation-Force for Soft Grippers Part II: Displacement Control Based Intrinsic Force Sensing
Mar 22, 2023



Compliant grasping is an essential capability for most robots in practical applications. For compliant robotic end-effectors that commonly appear in industrial or logistic scenarios, such as Fin-Ray gripper, it still remains challenging to build a bidirectional mathematical model that mutually maps the shape deformation and contact force. Part I of this article has constructed the force-displacement relationship for design optimization through the co-rotational theory with very few assumptions. In Part II, we further devise a detailed displacement-force mathematical model, enabling the compliant gripper to precisely estimate contact force sensor-free. Specifically, the proposed approach based on the co-rotational theory can calculate contact forces from deformations. The presented displacement-control algorithm elaborately investigates contact forces and provides force feedback for a force control system of a gripper, where deformation appears as displacements in contact points. Afterward, simulation experiments are conducted to evaluate the performance of the proposed model through comparisons with the finite-element analysis (FEA). Simulation results reveal that the proposed model accurately estimates contact force, with an average error of around 5% throughout all single/multiple node cases, regardless of various design parameters (Part I of this article is released in Google Drive).
Enabling Massage Actions: An Interactive Parallel Robot with Compliant Joints
Aug 26, 2022

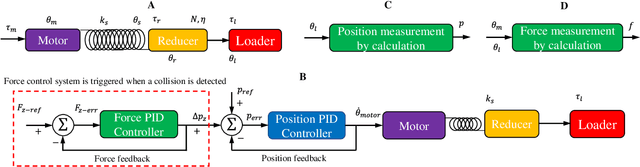

We propose a parallel massage robot with compliant joints based on the series elastic actuator (SEA), offering a unified force-position control approach. First, the kinematic and static force models are established for obtaining the corresponding control variables. Then, a novel force-position control strategy is proposed to separately control the force-position along the normal direction of the surface and another two-direction displacement, without the requirement of a robotic dynamics model. To evaluate its performance, we implement a series of robotic massage experiments. The results demonstrate that the proposed massage manipulator can successfully achieve desired forces and motion patterns of massage tasks, arriving at a high-score user experience.
Enabling Grasp Action: Generalized Evaluation of Grasp Stability via Contact Stiffness from Contact Mechanics Insight
Oct 19, 2018

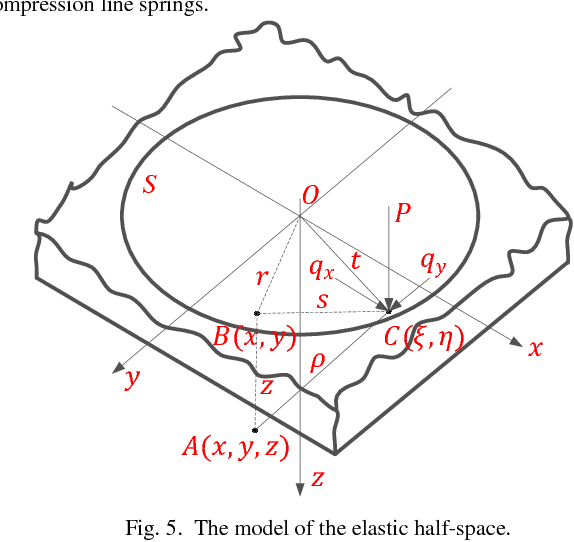
Performing a grasp is a pivotal capability for a robotic gripper. We propose a new evaluation approach of grasping stability via constructing a model of grasping stiffness based on the theory of contact mechanics. First, the mathematical models are built to explore soft contact and the general grasp stiffness between a finger and an object. Next, the grasping stiffness matrix is constructed to reflect the normal, tangential and torsion stiffness coefficients. Finally, we design two grasping cases to verify the proposed measurement criterion of grasping stability by comparing different grasping configurations. Specifically, a standard grasping index is used and compared with the minimum eigenvalue index of the constructed grasping stiffness we built. The comparison result reveals a similar tendency between them for measuring the grasping stability and thus, validates the proposed approach.