 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoencoding a Soft Touch to Learn Grasping from On-land to Underwater
Aug 16, 2023Robots play a critical role as the physical agent of human operators in exploring the ocean. However, it remains challenging to grasp objects reliably while fully submerging under a highly pressurized aquatic environment with little visible light, mainly due to the fluidic interference on the tactile mechanics between the finger and object surfaces. This study investigates the transferability of grasping knowledge from on-land to underwater via a vision-based soft robotic finger that learns 6D forces and torques (FT) using a Supervised Variational Autoencoder (SVAE). A high-framerate camera captures the whole-body deformations while a soft robotic finger interacts with physical objects on-land and underwater. Results show that the trained SVAE model learned a series of latent representations of the soft mechanics transferrable from land to water, presenting a superior adaptation to the changing environments against commercial FT sensors. Soft, delicate, and reactive grasping enabled by tactile intelligence enhances the gripper's underwater interaction with improved reliability and robustness at a much-reduced cost, paving the path for learning-based intelligent grasping to support fundamental scientific discoveries in environmental and ocean research.
Theoretical Model Construction of Deformation-Force for Soft Grippers Part I: Co-rotational Modeling and Force Control for Design Optimization
Mar 23, 2023



Compliant grippers, owing to adaptivity and safety, have attracted considerable attention for unstructured grasping in real applications, such as industrial or logistic scenarios. However, accurate construction of the mathematical model depicting the bidirectional relationship between shape deformation and contact force for such grippers, such as the Fin-Ray grippers, remains stagnant to date. To address this research gap, this article devises, presents, and experimentally validates a universal bidirectional force-displacement mathematical model for compliant grippers based on the co-rotational concept, which endows such grippers with an intrinsic force sensing capability and offers a better insight into the design optimization. In Part 1 of the article, we introduce the fundamental theory of the co-rotational approach, where arbitrary large deformation of beam elements can be modeled. Its intrinsic principle enables the theoretical modeling to consider various types of configurations and key design parameters with very few assumptions made. Further, a force control algorithm is proposed, providing accurate displacement estimations of the gripper under external forces with minor computational loads. The performance of the proposed method is experimentally verified through comparison with Finite Element Analysis, where the influence of four key design parameters on the gripper s performance is investigated, facilitating systematical design optimization. Part 2 of this article demonstrating the force sensing capabilities and the effects of representative co-rotational modeling parameters on model accuracy is released in Google Drive.
Theoretical Model Construction of Deformation-Force for Soft Grippers Part II: Displacement Control Based Intrinsic Force Sensing
Mar 22, 2023



Compliant grasping is an essential capability for most robots in practical applications. For compliant robotic end-effectors that commonly appear in industrial or logistic scenarios, such as Fin-Ray gripper, it still remains challenging to build a bidirectional mathematical model that mutually maps the shape deformation and contact force. Part I of this article has constructed the force-displacement relationship for design optimization through the co-rotational theory with very few assumptions. In Part II, we further devise a detailed displacement-force mathematical model, enabling the compliant gripper to precisely estimate contact force sensor-free. Specifically, the proposed approach based on the co-rotational theory can calculate contact forces from deformations. The presented displacement-control algorithm elaborately investigates contact forces and provides force feedback for a force control system of a gripper, where deformation appears as displacements in contact points. Afterward, simulation experiments are conducted to evaluate the performance of the proposed model through comparisons with the finite-element analysis (FEA). Simulation results reveal that the proposed model accurately estimates contact force, with an average error of around 5% throughout all single/multiple node cases, regardless of various design parameters (Part I of this article is released in Google Drive).
Enabling Grasp Action: Generalized Evaluation of Grasp Stability via Contact Stiffness from Contact Mechanics Insight
Oct 19, 2018

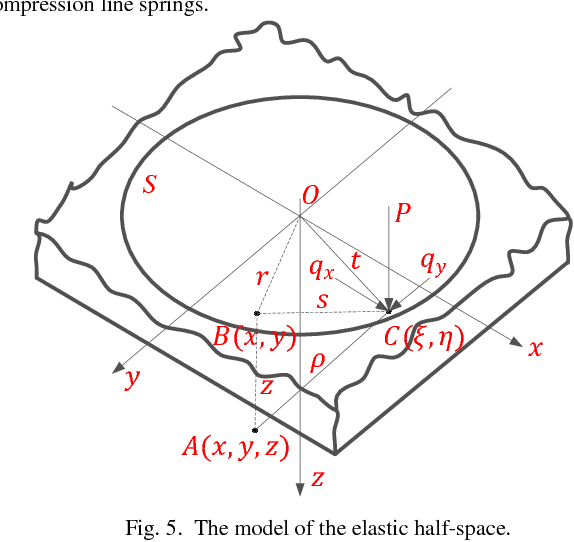
Performing a grasp is a pivotal capability for a robotic gripper. We propose a new evaluation approach of grasping stability via constructing a model of grasping stiffness based on the theory of contact mechanics. First, the mathematical models are built to explore soft contact and the general grasp stiffness between a finger and an object. Next, the grasping stiffness matrix is constructed to reflect the normal, tangential and torsion stiffness coefficients. Finally, we design two grasping cases to verify the proposed measurement criterion of grasping stability by comparing different grasping configurations. Specifically, a standard grasping index is used and compared with the minimum eigenvalue index of the constructed grasping stiffness we built. The comparison result reveals a similar tendency between them for measuring the grasping stability and thus, validates the proposed approach.