 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSee-through: Single-image Layer Decomposition for Anime Characters
Feb 03, 2026We introduce a framework that automates the transformation of static anime illustrations into manipulatable 2.5D models. Current professional workflows require tedious manual segmentation and the artistic ``hallucination'' of occluded regions to enable motion. Our approach overcomes this by decomposing a single image into fully inpainted, semantically distinct layers with inferred drawing orders. To address the scarcity of training data, we introduce a scalable engine that bootstraps high-quality supervision from commercial Live2D models, capturing pixel-perfect semantics and hidden geometry. Our methodology couples a diffusion-based Body Part Consistency Module, which enforces global geometric coherence, with a pixel-level pseudo-depth inference mechanism. This combination resolves the intricate stratification of anime characters, e.g., interleaving hair strands, allowing for dynamic layer reconstruction. We demonstrate that our approach yields high-fidelity, manipulatable models suitable for professional, real-time animation applications.
Uncertainty-oriented Order Learning for Facial Beauty Prediction
Sep 01, 2024



Previous Facial Beauty Prediction (FBP) methods generally model FB feature of an image as a point on the latent space, and learn a mapping from the point to a precise score. Although existing regression methods perform well on a single dataset, they are inclined to be sensitive to test data and have weak generalization ability. We think they underestimate two inconsistencies existing in the FBP problem: 1. inconsistency of FB standards among multiple datasets, and 2. inconsistency of human cognition on FB of an image. To address these issues, we propose a new Uncertainty-oriented Order Learning (UOL), where the order learning addresses the inconsistency of FB standards by learning the FB order relations among face images rather than a mapping, and the uncertainty modeling represents the inconsistency in human cognition. The key contribution of UOL is a designed distribution comparison module, which enables conventional order learning to learn the order of uncertain data. Extensive experiments on five datasets show that UOL outperforms the state-of-the-art methods on both accuracy and generalization ability.
Hyperstroke: A Novel High-quality Stroke Representation for Assistive Artistic Drawing
Aug 18, 2024Assistive drawing aims to facilitate the creative process by providing intelligent guidance to artists. Existing solutions often fail to effectively model intricate stroke details or adequately address the temporal aspects of drawing. We introduce hyperstroke, a novel stroke representation designed to capture precise fine stroke details, including RGB appearance and alpha-channel opacity. Using a Vector Quantization approach, hyperstroke learns compact tokenized representations of strokes from real-life drawing videos of artistic drawing. With hyperstroke, we propose to model assistive drawing via a transformer-based architecture, to enable intuitive and user-friendly drawing applications, which are experimented in our exploratory evaluation.
Sketch2Manga: Shaded Manga Screening from Sketch with Diffusion Models
Mar 13, 2024While manga is a popular entertainment form, creating manga is tedious, especially adding screentones to the created sketch, namely manga screening. Unfortunately, there is no existing method that tailors for automatic manga screening, probably due to the difficulty of generating high-quality shaded high-frequency screentones. The classic manga screening approaches generally require user input to provide screentone exemplars or a reference manga image. The recent deep learning models enables the automatic generation by learning from a large-scale dataset. However, the state-of-the-art models still fail to generate high-quality shaded screentones due to the lack of a tailored model and high-quality manga training data. In this paper, we propose a novel sketch-to-manga framework that first generates a color illustration from the sketch and then generates a screentoned manga based on the intensity guidance. Our method significantly outperforms existing methods in generating high-quality manga with shaded high-frequency screentones.
Proprioceptive State Estimation for Amphibious Tactile Sensing
Dec 15, 2023



This paper presents a novel vision-based proprioception approach for a soft robotic finger capable of estimating and reconstructing tactile interactions in terrestrial and aquatic environments. The key to this system lies in the finger's unique metamaterial structure, which facilitates omni-directional passive adaptation during grasping, protecting delicate objects across diverse scenarios. A compact in-finger camera captures high-framerate images of the finger's deformation during contact, extracting crucial tactile data in real time. We present a method of the volumetric discretized model of the soft finger and use the geometry constraints captured by the camera to find the optimal estimation of the deformed shape. The approach is benchmarked with a motion-tracking system with sparse markers and a haptic device with dense measurements. Both results show state-of-the-art accuracies, with a median error of 1.96 mm for overall body deformation, corresponding to 2.1$\%$ of the finger's length. More importantly, the state estimation is robust in both on-land and underwater environments as we demonstrate its usage for underwater object shape sensing. This combination of passive adaptation and real-time tactile sensing paves the way for amphibious robotic grasping applications.
Instance-guided Cartoon Editing with a Large-scale Dataset
Dec 04, 2023Cartoon editing, appreciated by both professional illustrators and hobbyists, allows extensive creative freedom and the development of original narratives within the cartoon domain. However, the existing literature on cartoon editing is complex and leans heavily on manual operations, owing to the challenge of automatic identification of individual character instances. Therefore, an automated segmentation of these elements becomes imperative to facilitate a variety of cartoon editing applications such as visual style editing, motion decomposition and transfer, and the computation of stereoscopic depths for an enriched visual experience. Unfortunately, most current segmentation methods are designed for natural photographs, failing to recognize from the intricate aesthetics of cartoon subjects, thus lowering segmentation quality. The major challenge stems from two key shortcomings: the rarity of high-quality cartoon dedicated datasets and the absence of competent models for high-resolution instance extraction on cartoons. To address this, we introduce a high-quality dataset of over 100k paired high-resolution cartoon images and their instance labeling masks. We also present an instance-aware image segmentation model that can generate accurate, high-resolution segmentation masks for characters in cartoon images. We present that the proposed approach enables a range of segmentation-dependent cartoon editing applications like 3D Ken Burns parallax effects, text-guided cartoon style editing, and puppet animation from illustrations and manga.
Autoencoding a Soft Touch to Learn Grasping from On-land to Underwater
Aug 16, 2023Robots play a critical role as the physical agent of human operators in exploring the ocean. However, it remains challenging to grasp objects reliably while fully submerging under a highly pressurized aquatic environment with little visible light, mainly due to the fluidic interference on the tactile mechanics between the finger and object surfaces. This study investigates the transferability of grasping knowledge from on-land to underwater via a vision-based soft robotic finger that learns 6D forces and torques (FT) using a Supervised Variational Autoencoder (SVAE). A high-framerate camera captures the whole-body deformations while a soft robotic finger interacts with physical objects on-land and underwater. Results show that the trained SVAE model learned a series of latent representations of the soft mechanics transferrable from land to water, presenting a superior adaptation to the changing environments against commercial FT sensors. Soft, delicate, and reactive grasping enabled by tactile intelligence enhances the gripper's underwater interaction with improved reliability and robustness at a much-reduced cost, paving the path for learning-based intelligent grasping to support fundamental scientific discoveries in environmental and ocean research.
Intelligence-Endogenous Management Platform for Computing and Network Convergence
Aug 07, 2023



Massive emerging applications are driving demand for the ubiquitous deployment of computing power today. This trend not only spurs the recent popularity of the \emph{Computing and Network Convergence} (CNC), but also introduces an urgent need for the intelligentization of a management platform to coordinate changing resources and tasks in the CNC. Therefore, in this article, we present the concept of an intelligence-endogenous management platform for CNCs called \emph{CNC brain} based on artificial intelligence technologies. It aims at efficiently and automatically matching the supply and demand with high heterogeneity in a CNC via four key building blocks, i.e., perception, scheduling, adaptation, and governance, throughout the CNC's life cycle. Their functionalities, goals, and challenges are presented. To examine the effectiveness of the proposed concept and framework, we also implement a prototype for the CNC brain based on a deep reinforcement learning technology. Also, it is evaluated on a CNC testbed that integrates two open-source and popular frameworks (OpenFaas and Kubernetes) and a real-world business dataset provided by Microsoft Azure. The evaluation results prove the proposed method's effectiveness in terms of resource utilization and performance. Finally, we highlight the future research directions of the CNC brain.
Artificial Intelligence Security Competition (AISC)
Dec 07, 2022



The security of artificial intelligence (AI) is an important research area towards safe, reliable, and trustworthy AI systems. To accelerate the research on AI security, the Artificial Intelligence Security Competition (AISC) was organized by the Zhongguancun Laboratory, China Industrial Control Systems Cyber Emergency Response Team, Institute for Artificial Intelligence, Tsinghua University, and RealAI as part of the Zhongguancun International Frontier Technology Innovation Competition (https://www.zgc-aisc.com/en). The competition consists of three tracks, including Deepfake Security Competition, Autonomous Driving Security Competition, and Face Recognition Security Competition. This report will introduce the competition rules of these three tracks and the solutions of top-ranking teams in each track.
Hard instance learning for quantum adiabatic prime factorization
Oct 10, 2021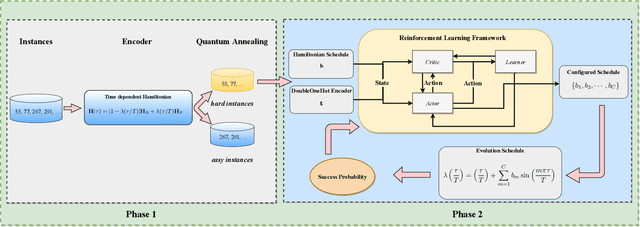
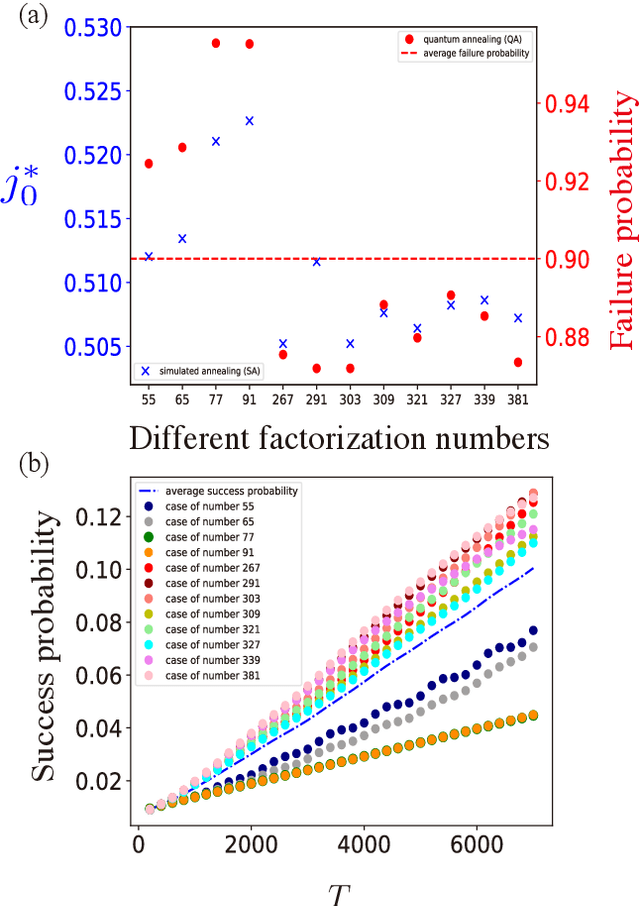
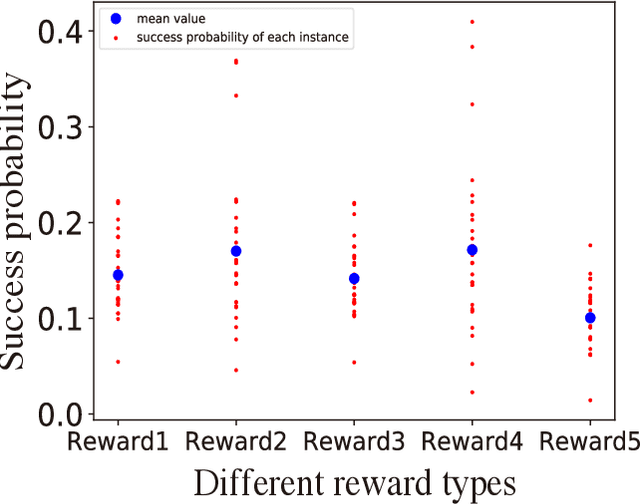
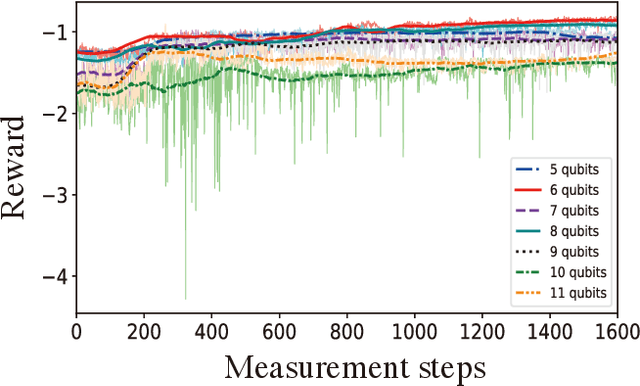
Prime factorization is a difficult problem with classical computing, whose exponential hardness is the foundation of Rivest-Shamir-Adleman (RSA) cryptography. With programmable quantum devices, adiabatic quantum computing has been proposed as a plausible approach to solve prime factorization, having promising advantage over classical computing. Here, we find there are certain hard instances that are consistently intractable for both classical simulated annealing and un-configured adiabatic quantum computing (AQC). Aiming at an automated architecture for optimal configuration of quantum adiabatic factorization, we apply a deep reinforcement learning (RL) method to configure the AQC algorithm. By setting the success probability of the worst-case problem instances as the reward to RL, we show the AQC performance on the hard instances is dramatically improved by RL configuration. The success probability also becomes more evenly distributed over different problem instances, meaning the configured AQC is more stable as compared to the un-configured case. Through a technique of transfer learning, we find prominent evidence that the framework of AQC configuration is scalable -- the configured AQC as trained on five qubits remains working efficiently on nine qubits with a minimal amount of additional training cost.