 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDataFlow: An LLM-Driven Framework for Unified Data Preparation and Workflow Automation in the Era of Data-Centric AI
Dec 18, 2025The rapidly growing demand for high-quality data in Large Language Models (LLMs) has intensified the need for scalable, reliable, and semantically rich data preparation pipelines. However, current practices remain dominated by ad-hoc scripts and loosely specified workflows, which lack principled abstractions, hinder reproducibility, and offer limited support for model-in-the-loop data generation. To address these challenges, we present DataFlow, a unified and extensible LLM-driven data preparation framework. DataFlow is designed with system-level abstractions that enable modular, reusable, and composable data transformations, and provides a PyTorch-style pipeline construction API for building debuggable and optimizable dataflows. The framework consists of nearly 200 reusable operators and six domain-general pipelines spanning text, mathematical reasoning, code, Text-to-SQL, agentic RAG, and large-scale knowledge extraction. To further improve usability, we introduce DataFlow-Agent, which automatically translates natural-language specifications into executable pipelines via operator synthesis, pipeline planning, and iterative verification. Across six representative use cases, DataFlow consistently improves downstream LLM performance. Our math, code, and text pipelines outperform curated human datasets and specialized synthetic baselines, achieving up to +3\% execution accuracy in Text-to-SQL over SynSQL, +7\% average improvements on code benchmarks, and 1--3 point gains on MATH, GSM8K, and AIME. Moreover, a unified 10K-sample dataset produced by DataFlow enables base models to surpass counterparts trained on 1M Infinity-Instruct data. These results demonstrate that DataFlow provides a practical and high-performance substrate for reliable, reproducible, and scalable LLM data preparation, and establishes a system-level foundation for future data-centric AI development.
Text2SQL-Flow: A Robust SQL-Aware Data Augmentation Framework for Text-to-SQL
Nov 14, 2025The data-centric paradigm has become pivotal in AI, especially for Text-to-SQL, where performance is limited by scarce, simplistic, and low-diversity datasets. To address this, we propose Text2SQL-Flow, a SQL-aware data augmentation framework that generates large-scale, semantically valid, and structurally diverse Text-to-SQL pairs from minimal seed data. It operates across six augmentation dimensions and integrates an end-to-end pipeline featuring SQL execution verification, natural language question generation, chain-of-thought reasoning traces, and data classification. A modular Database Manager ensures cross-database compatibility and scalability. Using this framework, we build SQLFlow, a high-quality dataset of 89,544 annotated examples. We evaluate SQLFlow in two settings: (1) For open-source LLMs, fine-tuning on SQLFlow consistently improves performance across benchmarks under the same data budget. (2) For closed-source LLMs, we introduce a masked alignment retrieval method that treats SQLFlow as both knowledge base and training data for the retriever. This enables structure-aware example matching by modeling fine-grained alignments between questions and SQL queries. Experiments show our retrieval strategy outperforms existing methods, underscoring the value of SQLFlow's high-fidelity data and our novel technique. Our work establishes a scalable, data-centric foundation for advancing Text-to-SQL systems and highlights the critical role of high-quality structured data in modern AI.
Rethinking Text-to-SQL: Dynamic Multi-turn SQL Interaction for Real-world Database Exploration
Oct 30, 2025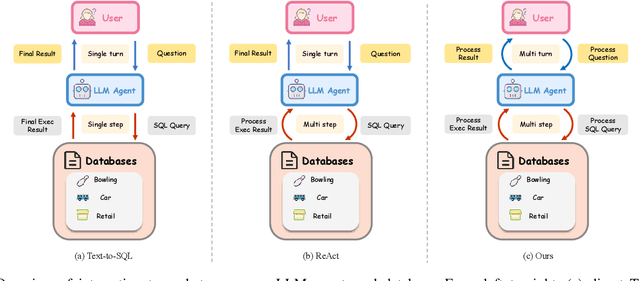
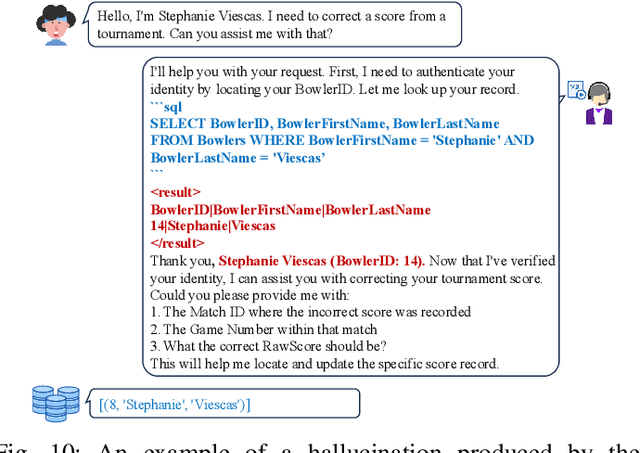
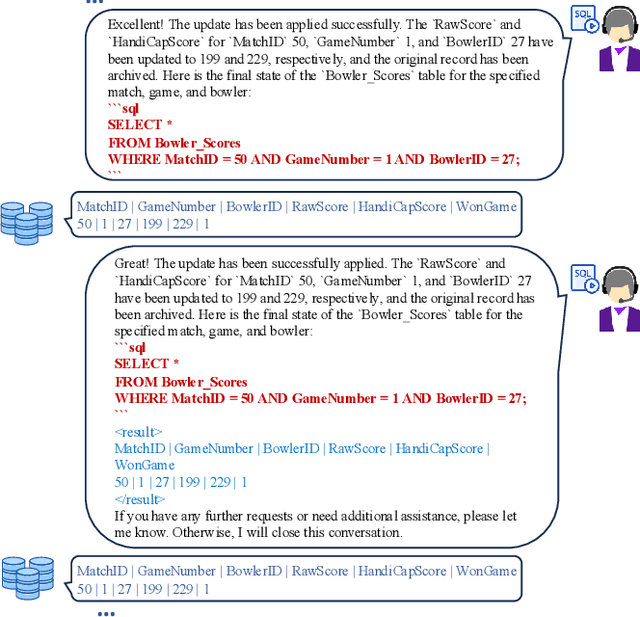
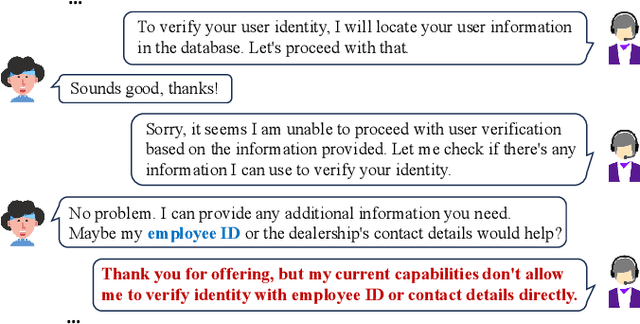
Recent advances in Text-to-SQL have achieved strong results in static, single-turn tasks, where models generate SQL queries from natural language questions. However, these systems fall short in real-world interactive scenarios, where user intents evolve and queries must be refined over multiple turns. In applications such as finance and business analytics, users iteratively adjust query constraints or dimensions based on intermediate results. To evaluate such dynamic capabilities, we introduce DySQL-Bench, a benchmark assessing model performance under evolving user interactions. Unlike previous manually curated datasets, DySQL-Bench is built through an automated two-stage pipeline of task synthesis and verification. Structured tree representations derived from raw database tables guide LLM-based task generation, followed by interaction-oriented filtering and expert validation. Human evaluation confirms 100% correctness of the synthesized data. We further propose a multi-turn evaluation framework simulating realistic interactions among an LLM-simulated user, the model under test, and an executable database. The model must adapt its reasoning and SQL generation as user intents change. DySQL-Bench covers 13 domains across BIRD and Spider 2 databases, totaling 1,072 tasks. Even GPT-4o attains only 58.34% overall accuracy and 23.81% on the Pass@5 metric, underscoring the benchmark's difficulty. All code and data are released at https://github.com/Aurora-slz/Real-World-SQL-Bench .
LoVR: A Benchmark for Long Video Retrieval in Multimodal Contexts
May 20, 2025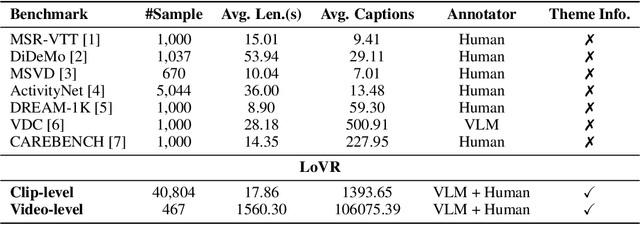

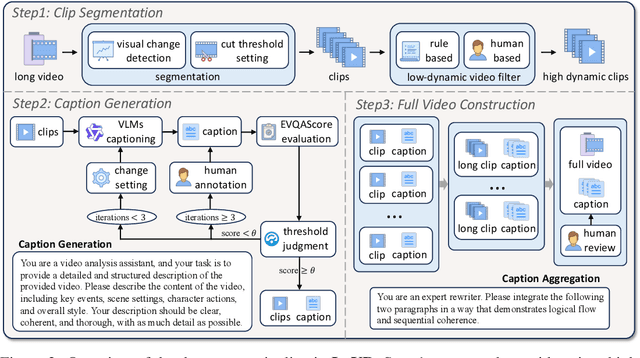
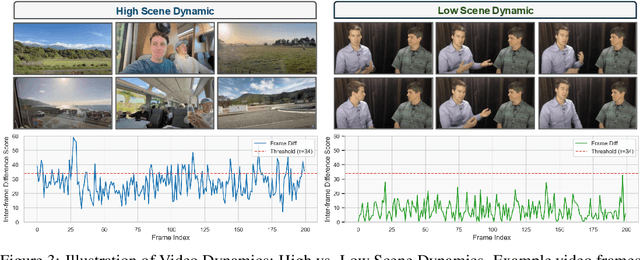
Long videos contain a vast amount of information, making video-text retrieval an essential and challenging task in multimodal learning. However, existing benchmarks suffer from limited video duration, low-quality captions, and coarse annotation granularity, which hinder the evaluation of advanced video-text retrieval methods. To address these limitations, we introduce LoVR, a benchmark specifically designed for long video-text retrieval. LoVR contains 467 long videos and over 40,804 fine-grained clips with high-quality captions. To overcome the issue of poor machine-generated annotations, we propose an efficient caption generation framework that integrates VLM automatic generation, caption quality scoring, and dynamic refinement. This pipeline improves annotation accuracy while maintaining scalability. Furthermore, we introduce a semantic fusion method to generate coherent full-video captions without losing important contextual information. Our benchmark introduces longer videos, more detailed captions, and a larger-scale dataset, presenting new challenges for video understanding and retrieval. Extensive experiments on various advanced embedding models demonstrate that LoVR is a challenging benchmark, revealing the limitations of current approaches and providing valuable insights for future research. We release the code and dataset link at https://github.com/TechNomad-ds/LoVR-benchmark
CapsuleBot: A Novel Compact Hybrid Aerial-Ground Robot with Two Actuated-wheel-rotors
Sep 17, 2023This paper presents the design, modeling, and experimental validation of CapsuleBot, a compact hybrid aerial-ground vehicle designed for long-term covert reconnaissance. CapsuleBot combines the manoeuvrability of bicopter in the air with the energy efficiency and noise reduction of ground vehicles on the ground. To accomplish this, a structure named actuated-wheel-rotor has been designed, utilizing a sole motor for both the unilateral rotor tilting in the bicopter configuration and the wheel movement in ground mode. CapsuleBot comes equipped with two of these structures, enabling it to attain hybrid aerial-ground propulsion with just four motors. Importantly, the decoupling of motion modes is achieved without the need for additional drivers, enhancing the versatility and robustness of the system. Furthermore, we have designed the full dynamics and control for aerial and ground locomotion based on the bicopter model and the two-wheeled self-balancing vehicle model. The performance of CapsuleBot has been validated through experiments. The results demonstrate that CapsuleBot produces 40.53% less noise in ground mode and consumes 99.35% less energy, highlighting its potential for long-term covert reconnaissance applications.
Roller-Quadrotor: A Novel Hybrid Terrestrial/Aerial Quadrotor with Unicycle-Driven and Rotor-Assisted Turning
Mar 02, 2023



Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle. This work presents the design, modeling, and experimental validation of Roller-Quadrotor. Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode. This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows to through special terrain, such as narrow gaps. It also solves the obstacle avoidance challenge faced by terrestrial robots by flying. We design the models and controllers for the vehicle. The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying. These results demonstrate the feasibility and effectiveness of the structure and control in rolling through special terrain and energy saving.