 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUSS-Nav: Unified Spatio-Semantic Scene Graph for Lightweight UAV Zero-Shot Object Navigation
Feb 03, 2026Zero-Shot Object Navigation in unknown environments poses significant challenges for Unmanned Aerial Vehicles (UAVs) due to the conflict between high-level semantic reasoning requirements and limited onboard computational resources. To address this, we present USS-Nav, a lightweight framework that incrementally constructs a Unified Spatio-Semantic scene graph and enables efficient Large Language Model (LLM)-augmented Zero-Shot Object Navigation in unknown environments. Specifically, we introduce an incremental Spatial Connectivity Graph generation method utilizing polyhedral expansion to capture global geometric topology, which is dynamically partitioned into semantic regions via graph clustering. Concurrently, open-vocabulary object semantics are instantiated and anchored to this topology to form a hierarchical environmental representation. Leveraging this hierarchical structure, we present a coarse-to-fine exploration strategy: LLM grounded in the scene graph's semantics to determine global target regions, while a local planner optimizes frontier coverage based on information gain. Experimental results demonstrate that our framework outperforms state-of-the-art methods in terms of computational efficiency and real-time update frequency (15 Hz) on a resource-constrained platform. Furthermore, ablation studies confirm the effectiveness of our framework, showing substantial improvements in Success weighted by Path Length (SPL). The source code will be made publicly available to foster further research.
VLA-AN: An Efficient and Onboard Vision-Language-Action Framework for Aerial Navigation in Complex Environments
Dec 19, 2025



This paper proposes VLA-AN, an efficient and onboard Vision-Language-Action (VLA) framework dedicated to autonomous drone navigation in complex environments. VLA-AN addresses four major limitations of existing large aerial navigation models: the data domain gap, insufficient temporal navigation with reasoning, safety issues with generative action policies, and onboard deployment constraints. First, we construct a high-fidelity dataset utilizing 3D Gaussian Splatting (3D-GS) to effectively bridge the domain gap. Second, we introduce a progressive three-stage training framework that sequentially reinforces scene comprehension, core flight skills, and complex navigation capabilities. Third, we design a lightweight, real-time action module coupled with geometric safety correction. This module ensures fast, collision-free, and stable command generation, mitigating the safety risks inherent in stochastic generative policies. Finally, through deep optimization of the onboard deployment pipeline, VLA-AN achieves a robust real-time 8.3x improvement in inference throughput on resource-constrained UAVs. Extensive experiments demonstrate that VLA-AN significantly improves spatial grounding, scene reasoning, and long-horizon navigation, achieving a maximum single-task success rate of 98.1%, and providing an efficient, practical solution for realizing full-chain closed-loop autonomy in lightweight aerial robots.
Ground-Effect-Aware Modeling and Control for Multicopters
Jun 24, 2025The ground effect on multicopters introduces several challenges, such as control errors caused by additional lift, oscillations that may occur during near-ground flight due to external torques, and the influence of ground airflow on models such as the rotor drag and the mixing matrix. This article collects and analyzes the dynamics data of near-ground multicopter flight through various methods, including force measurement platforms and real-world flights. For the first time, we summarize the mathematical model of the external torque of multicopters under ground effect. The influence of ground airflow on rotor drag and the mixing matrix is also verified through adequate experimentation and analysis. Through simplification and derivation, the differential flatness of the multicopter's dynamic model under ground effect is confirmed. To mitigate the influence of these disturbance models on control, we propose a control method that combines dynamic inverse and disturbance models, ensuring consistent control effectiveness at both high and low altitudes. In this method, the additional thrust and variations in rotor drag under ground effect are both considered and compensated through feedforward models. The leveling torque of ground effect can be equivalently represented as variations in the center of gravity and the moment of inertia. In this way, the leveling torque does not explicitly appear in the dynamic model. The final experimental results show that the method proposed in this paper reduces the control error (RMSE) by \textbf{45.3\%}. Please check the supplementary material at: https://github.com/ZJU-FAST-Lab/Ground-effect-controller.
Reactive Aerobatic Flight via Reinforcement Learning
May 30, 2025Quadrotors have demonstrated remarkable versatility, yet their full aerobatic potential remains largely untapped due to inherent underactuation and the complexity of aggressive maneuvers. Traditional approaches, separating trajectory optimization and tracking control, suffer from tracking inaccuracies, computational latency, and sensitivity to initial conditions, limiting their effectiveness in dynamic, high-agility scenarios. Inspired by recent breakthroughs in data-driven methods, we propose a reinforcement learning-based framework that directly maps drone states and aerobatic intentions to control commands, eliminating modular separation to enable quadrotors to perform end-to-end policy optimization for extreme aerobatic maneuvers. To ensure efficient and stable training, we introduce an automated curriculum learning strategy that dynamically adjusts aerobatic task difficulty. Enabled by domain randomization for robust zero-shot sim-to-real transfer, our approach is validated in demanding real-world experiments, including the first demonstration of a drone autonomously performing continuous inverted flight while reactively navigating a moving gate, showcasing unprecedented agility.
Shape-Adaptive Planning and Control for a Deformable Quadrotor
May 21, 2025Drones have become essential in various applications, but conventional quadrotors face limitations in confined spaces and complex tasks. Deformable drones, which can adapt their shape in real-time, offer a promising solution to overcome these challenges, while also enhancing maneuverability and enabling novel tasks like object grasping. This paper presents a novel approach to autonomous motion planning and control for deformable quadrotors. We introduce a shape-adaptive trajectory planner that incorporates deformation dynamics into path generation, using a scalable kinodynamic A* search to handle deformation parameters in complex environments. The backend spatio-temporal optimization is capable of generating optimally smooth trajectories that incorporate shape deformation. Additionally, we propose an enhanced control strategy that compensates for external forces and torque disturbances, achieving a 37.3\% reduction in trajectory tracking error compared to our previous work. Our approach is validated through simulations and real-world experiments, demonstrating its effectiveness in narrow-gap traversal and multi-modal deformable tasks.
Model-Based Planning and Control for Terrestrial-Aerial Bimodal Vehicles with Passive Wheels
Mar 01, 2024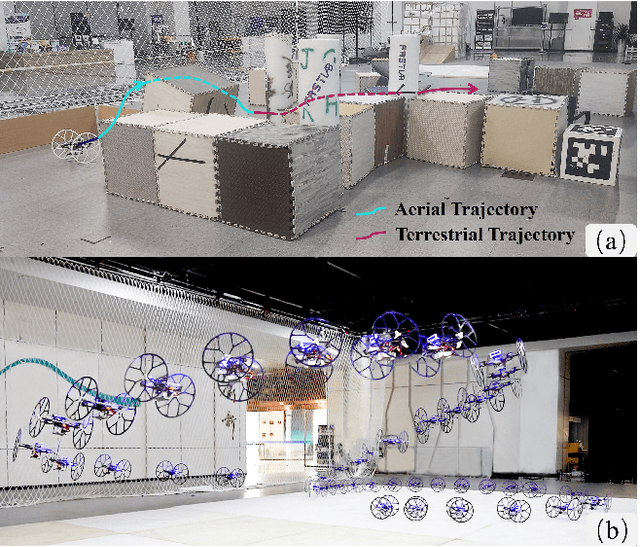
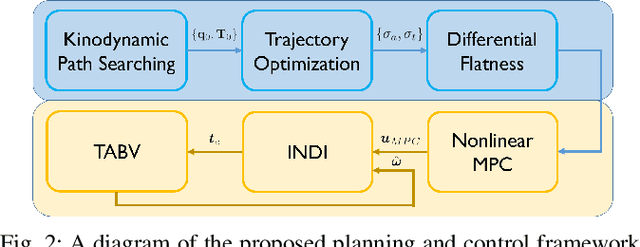
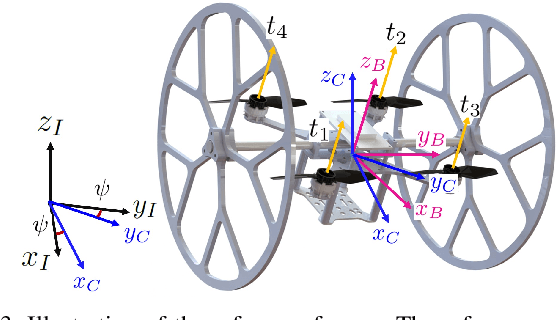
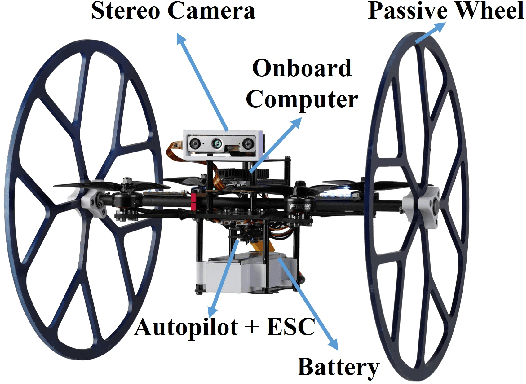
Terrestrial and aerial bimodal vehicles have gained widespread attention due to their cross-domain maneuverability. Nevertheless, their bimodal dynamics significantly increase the complexity of motion planning and control, thus hindering robust and efficient autonomous navigation in unknown environments. To resolve this issue, we develop a model-based planning and control framework for terrestrial aerial bi-modal vehicles. This work begins by deriving a unified dynamic model and the corresponding differential flatness. Leveraging differential flatness, an optimization-based trajectory planner is proposed, which takes into account both solution quality and computational efficiency. Moreover, we design a tracking controller using nonlinear model predictive control based on the proposed unified dynamic model to achieve accurate trajectory tracking and smooth mode transition. We validate our framework through extensive benchmark comparisons and experiments, demonstrating its effectiveness in terms of planning quality and control performance.
Ring-Rotor: A Novel Retractable Ring-shaped Quadrotor with Aerial Grasping and Transportation Capability
Apr 07, 2023



This letter presents a novel and retractable ring-shaped quadrotor called Ring-Rotor that can adjust the vehicle's length and width simultaneously. Unlike other morphing quadrotors with high platform complexity and poor controllability, Ring-Rotor uses only one servo motor for morphing but reduces the largest dimension of the vehicle by approximately 31.4\%. It can guarantee passibility while flying through small spaces in its compact form and energy saving in its standard form. Meanwhile, the vehicle breaks the cross configuration of general quadrotors with four arms connected to the central body and innovates a ring-shaped mechanical structure with spare central space. Based on this, an ingenious whole-body aerial grasping and transportation scheme is designed to carry various shapes of objects without the external manipulator mechanism. Moreover, we exploit a nonlinear model predictive control (NMPC) strategy that uses a time-variant physical parameter model to adapt to the quadrotor morphology. Above mentioned applications are performed in real-world experiments to demonstrate the system's high versatility.
Roller-Quadrotor: A Novel Hybrid Terrestrial/Aerial Quadrotor with Unicycle-Driven and Rotor-Assisted Turning
Mar 02, 2023



Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle. This work presents the design, modeling, and experimental validation of Roller-Quadrotor. Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode. This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows to through special terrain, such as narrow gaps. It also solves the obstacle avoidance challenge faced by terrestrial robots by flying. We design the models and controllers for the vehicle. The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying. These results demonstrate the feasibility and effectiveness of the structure and control in rolling through special terrain and energy saving.
TIE: An Autonomous and Adaptive Terrestrial-Aerial Quadrotor
Sep 10, 2021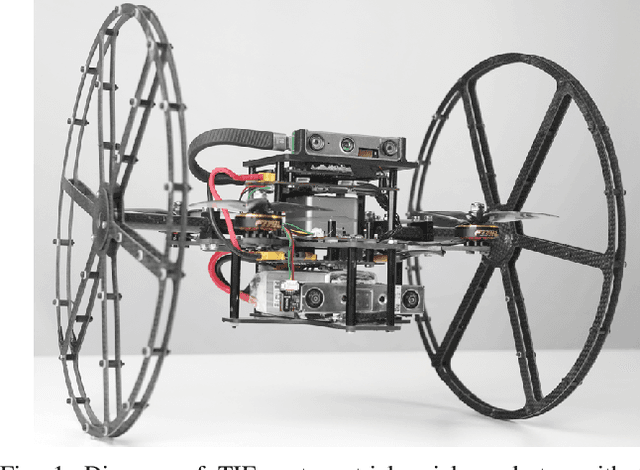
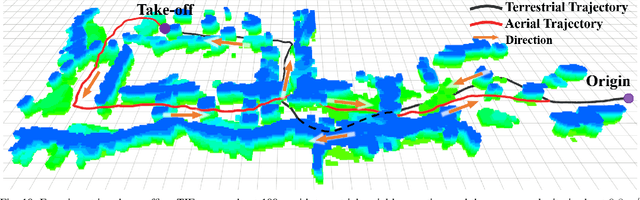
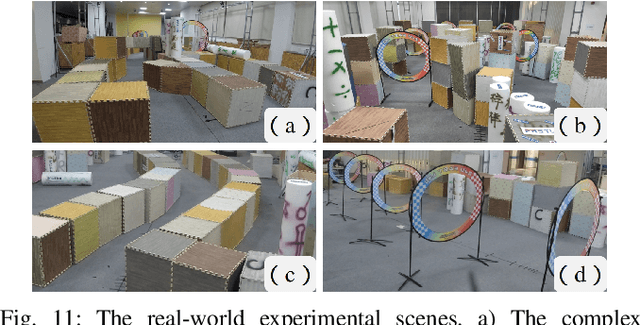
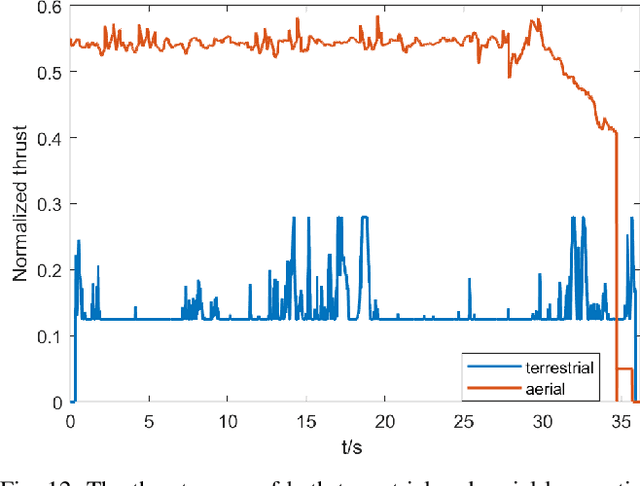
This letter presents a fully autonomous robot system that possesses both terrestrial and aerial mobility. We firstly develop a lightweight terrestrial-aerial quadrotor that carries sufficient sensing and computing resources. It incorporates both the high mobility of unmanned aerial vehicles and the long endurance of unmanned ground vehicles. An adaptive navigation framework is then proposed that brings complete autonomy to it. In this framework, a hierarchical motion planner is proposed to generate safe and low-power terrestrial-aerial trajectories in unknown environments. Moreover, we present a unified motion controller which dynamically adjusts energy consumption in terrestrial locomotion. Extensive realworld experiments and benchmark comparisons validate the robustness and outstanding performance of the proposed system. During the tests, it safely traverses complex environments with terrestrial aerial integrated mobility, and achieves 7 times energy savings in terrestrial locomotion. Finally, we will release our code and hardware configuration as an open-source package.