 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Class of Dual-Frame Passively-Tilting Fully-Actuated Hexacopter
Nov 19, 2025



This paper proposed a novel fully-actuated hexacopter. It features a dual-frame passive tilting structure and achieves independent control of translational motion and attitude with minimal actuators. Compared to previous fully-actuated UAVs, it liminates internal force cancellation, resulting in higher flight efficiency and endurance under equivalent payload conditions. Based on the dynamic model of fully-actuated hexacopter, a full-actuation controller is designed to achieve efficient and stable control. Finally, simulation is conducted, validating the superior fully-actuated motion capability of fully-actuated hexacopter and the effectiveness of the proposed control strategy.
Urban1960SatSeg: Unsupervised Semantic Segmentation of Mid-20$^{th}$ century Urban Landscapes with Satellite Imageries
Jun 12, 2025Historical satellite imagery, such as mid-20$^{th}$ century Keyhole data, offers rare insights into understanding early urban development and long-term transformation. However, severe quality degradation (e.g., distortion, misalignment, and spectral scarcity) and annotation absence have long hindered semantic segmentation on such historical RS imagery. To bridge this gap and enhance understanding of urban development, we introduce $\textbf{Urban1960SatBench}$, an annotated segmentation dataset based on historical satellite imagery with the earliest observation time among all existing segmentation datasets, along with a benchmark framework for unsupervised segmentation tasks, $\textbf{Urban1960SatUSM}$. First, $\textbf{Urban1960SatBench}$ serves as a novel, expertly annotated semantic segmentation dataset built on mid-20$^{th}$ century Keyhole imagery, covering 1,240 km$^2$ and key urban classes (buildings, roads, farmland, water). As the earliest segmentation dataset of its kind, it provides a pioneering benchmark for historical urban understanding. Second, $\textbf{Urban1960SatUSM}$(Unsupervised Segmentation Model) is a novel unsupervised semantic segmentation framework for historical RS imagery. It employs a confidence-aware alignment mechanism and focal-confidence loss based on a self-supervised learning architecture, which generates robust pseudo-labels and adaptively prioritizes prediction difficulty and label reliability to improve unsupervised segmentation on noisy historical data without manual supervision. Experiments show Urban1960SatUSM significantly outperforms existing unsupervised segmentation methods on Urban1960SatSeg for segmenting historical urban scenes, promising in paving the way for quantitative studies of long-term urban change using modern computer vision. Our benchmark and supplementary material are available at https://github.com/Tianxiang-Hao/Urban1960SatSeg.
HEPP: Hyper-efficient Perception and Planning for High-speed Obstacle Avoidance of UAVs
May 23, 2025High-speed obstacle avoidance of uncrewed aerial vehicles (UAVs) in cluttered environments is a significant challenge. Existing UAV planning and obstacle avoidance systems can only fly at moderate speeds or at high speeds over empty or sparse fields. In this article, we propose a hyper-efficient perception and planning system for the high-speed obstacle avoidance of UAVs. The system mainly consists of three modules: 1) A novel incremental robocentric mapping method with distance and gradient information, which takes 89.5% less time compared to existing methods. 2) A novel obstacle-aware topological path search method that generates multiple distinct paths. 3) An adaptive gradient-based high-speed trajectory generation method with a novel time pre-allocation algorithm. With these innovations, the system has an excellent real-time performance with only milliseconds latency in each iteration, taking 79.24% less time than existing methods at high speeds (15 m/s in cluttered environments), allowing UAVs to fly swiftly and avoid obstacles in cluttered environments. The planned trajectory of the UAV is close to the global optimum in both temporal and spatial domains. Finally, extensive validations in both simulation and real-world experiments demonstrate the effectiveness of our proposed system for high-speed navigation in cluttered environments.
TianQuan-Climate: A Subseasonal-to-Seasonal Global Weather Model via Incorporate Climatology State
Apr 14, 2025Subseasonal forecasting serves as an important support for Sustainable Development Goals (SDGs), such as climate challenges, agricultural yield and sustainable energy production. However, subseasonal forecasting is a complex task in meteorology due to dissipating initial conditions and delayed external forces. Although AI models are increasingly pushing the boundaries of this forecasting limit, they face two major challenges: error accumulation and Smoothness. To address these two challenges, we propose Climate Furnace Subseasonal-to-Seasonal (TianQuan-Climate), a novel machine learning model designed to provide global daily mean forecasts up to 45 days, covering five upper-air atmospheric variables at 13 pressure levels and two surface variables. Our proposed TianQuan-Climate has two advantages: 1) it utilizes a multi-model prediction strategy to reduce system error impacts in long-term subseasonal forecasts; 2) it incorporates a Content Fusion Module for climatological integration and extends ViT with uncertainty blocks (UD-ViT) to improve generalization by learning from uncertainty. We demonstrate the effectiveness of TianQuan-Climate on benchmarks for weather forecasting and climate projections within the 15 to 45-day range, where TianQuan-Climate outperforms existing numerical and AI methods.
TactV: A Class of Hybrid Terrestrial/Aerial Coaxial Tilt-Rotor Vehicles
Nov 19, 2024To enhance the obstacle-crossing and endurance capabilities of vehicles operating in complex environments, this paper presents the design of a hybrid terrestrial/aerial coaxial tilt-rotor vehicle, TactV, which integrates advantages such as lightweight construction and high maneuverability. Unlike existing tandem dual-rotor vehicles, TactV employs a tiltable coaxial dual-rotor design and features a spherical cage structure that encases the body, allowing for omnidirectional movement while further reducing its overall dimensions. To enable TactV to maneuver flexibly in aerial, planar, and inclined surfaces, we established corresponding dynamic and control models for each mode. Additionally, we leveraged TactV's tiltable center of gravity to design energy-saving and high-mobility modes for ground operations, thereby further enhancing its endurance. Experimental designs for both aerial and ground tests corroborated the superiority of TactV's movement capabilities and control strategies.
Guiding Reinforcement Learning with Incomplete System Dynamics
Oct 24, 2024Model-free reinforcement learning (RL) is inherently a reactive method, operating under the assumption that it starts with no prior knowledge of the system and entirely depends on trial-and-error for learning. This approach faces several challenges, such as poor sample efficiency, generalization, and the need for well-designed reward functions to guide learning effectively. On the other hand, controllers based on complete system dynamics do not require data. This paper addresses the intermediate situation where there is not enough model information for complete controller design, but there is enough to suggest that a model-free approach is not the best approach either. By carefully decoupling known and unknown information about the system dynamics, we obtain an embedded controller guided by our partial model and thus improve the learning efficiency of an RL-enhanced approach. A modular design allows us to deploy mainstream RL algorithms to refine the policy. Simulation results show that our method significantly improves sample efficiency compared with standard RL methods on continuous control tasks, and also offers enhanced performance over traditional control approaches. Experiments on a real ground vehicle also validate the performance of our method, including generalization and robustness.
A$^{2}$-MAE: A spatial-temporal-spectral unified remote sensing pre-training method based on anchor-aware masked autoencoder
Jun 12, 2024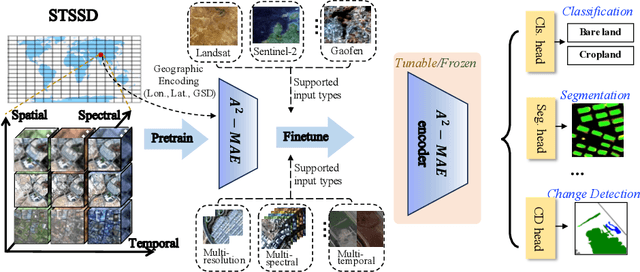
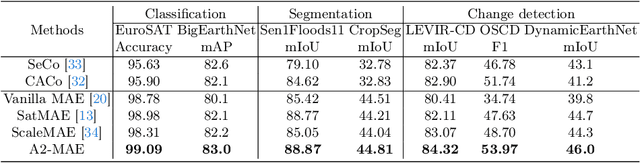
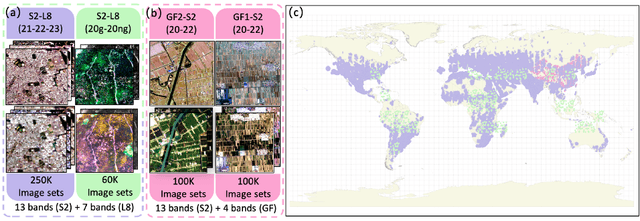
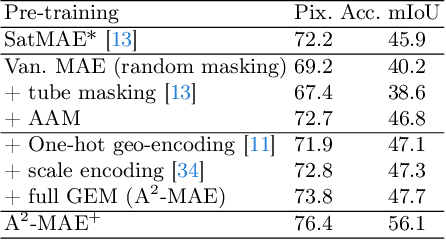
Vast amounts of remote sensing (RS) data provide Earth observations across multiple dimensions, encompassing critical spatial, temporal, and spectral information which is essential for addressing global-scale challenges such as land use monitoring, disaster prevention, and environmental change mitigation. Despite various pre-training methods tailored to the characteristics of RS data, a key limitation persists: the inability to effectively integrate spatial, temporal, and spectral information within a single unified model. To unlock the potential of RS data, we construct a Spatial-Temporal-Spectral Structured Dataset (STSSD) characterized by the incorporation of multiple RS sources, diverse coverage, unified locations within image sets, and heterogeneity within images. Building upon this structured dataset, we propose an Anchor-Aware Masked AutoEncoder method (A$^{2}$-MAE), leveraging intrinsic complementary information from the different kinds of images and geo-information to reconstruct the masked patches during the pre-training phase. A$^{2}$-MAE integrates an anchor-aware masking strategy and a geographic encoding module to comprehensively exploit the properties of RS images. Specifically, the proposed anchor-aware masking strategy dynamically adapts the masking process based on the meta-information of a pre-selected anchor image, thereby facilitating the training on images captured by diverse types of RS sources within one model. Furthermore, we propose a geographic encoding method to leverage accurate spatial patterns, enhancing the model generalization capabilities for downstream applications that are generally location-related. Extensive experiments demonstrate our method achieves comprehensive improvements across various downstream tasks compared with existing RS pre-training methods, including image classification, semantic segmentation, and change detection tasks.
FUSU: A Multi-temporal-source Land Use Change Segmentation Dataset for Fine-grained Urban Semantic Understanding
May 29, 2024Fine urban change segmentation using multi-temporal remote sensing images is essential for understanding human-environment interactions. Despite advances in remote sensing data for urban monitoring, coarse-grained classification systems and the lack of continuous temporal observations hinder the application of deep learning to urban change analysis. To address this, we introduce FUSU, a multi-source, multi-temporal change segmentation dataset for fine-grained urban semantic understanding. FUSU features the most detailed land use classification system to date, with 17 classes and 30 billion pixels of annotations. It includes bi-temporal high-resolution satellite images with 20-50 cm ground sample distance and monthly optical and radar satellite time series, covering 847 km2 across five urban areas in China. The fine-grained pixel-wise annotations and high spatial-temporal resolution data provide a robust foundation for deep learning models to understand urbanization and land use changes. To fully leverage FUSU, we propose a unified time-series architecture for both change detection and segmentation and benchmark FUSU on various methods for several tasks. Dataset and code will be available at: https://github.com/yuanshuai0914/FUSU.
Building Bridges across Spatial and Temporal Resolutions: Reference-Based Super-Resolution via Change Priors and Conditional Diffusion Model
Mar 26, 2024



Reference-based super-resolution (RefSR) has the potential to build bridges across spatial and temporal resolutions of remote sensing images. However, existing RefSR methods are limited by the faithfulness of content reconstruction and the effectiveness of texture transfer in large scaling factors. Conditional diffusion models have opened up new opportunities for generating realistic high-resolution images, but effectively utilizing reference images within these models remains an area for further exploration. Furthermore, content fidelity is difficult to guarantee in areas without relevant reference information. To solve these issues, we propose a change-aware diffusion model named Ref-Diff for RefSR, using the land cover change priors to guide the denoising process explicitly. Specifically, we inject the priors into the denoising model to improve the utilization of reference information in unchanged areas and regulate the reconstruction of semantically relevant content in changed areas. With this powerful guidance, we decouple the semantics-guided denoising and reference texture-guided denoising processes to improve the model performance. Extensive experiments demonstrate the superior effectiveness and robustness of the proposed method compared with state-of-the-art RefSR methods in both quantitative and qualitative evaluations. The code and data are available at https://github.com/dongrunmin/RefDiff.
DeepLight: Reconstructing High-Resolution Observations of Nighttime Light With Multi-Modal Remote Sensing Data
Feb 24, 2024



Nighttime light (NTL) remote sensing observation serves as a unique proxy for quantitatively assessing progress toward meeting a series of Sustainable Development Goals (SDGs), such as poverty estimation, urban sustainable development, and carbon emission. However, existing NTL observations often suffer from pervasive degradation and inconsistency, limiting their utility for computing the indicators defined by the SDGs. In this study, we propose a novel approach to reconstruct high-resolution NTL images using multi-modal remote sensing data. To support this research endeavor, we introduce DeepLightMD, a comprehensive dataset comprising data from five heterogeneous sensors, offering fine spatial resolution and rich spectral information at a national scale. Additionally, we present DeepLightSR, a calibration-aware method for building bridges between spatially heterogeneous modality data in the multi-modality super-resolution. DeepLightSR integrates calibration-aware alignment, an auxiliary-to-main multi-modality fusion, and an auxiliary-embedded refinement to effectively address spatial heterogeneity, fuse diversely representative features, and enhance performance in $8\times$ super-resolution (SR) tasks. Extensive experiments demonstrate the superiority of DeepLightSR over 8 competing methods, as evidenced by improvements in PSNR (2.01 dB $ \sim $ 13.25 dB) and PIQE (0.49 $ \sim $ 9.32). Our findings underscore the practical significance of our proposed dataset and model in reconstructing high-resolution NTL data, supporting efficiently and quantitatively assessing the SDG progress.