 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFTDMamba: Frequency-Assisted Temporal Dilation Mamba for Unmanned Aerial Vehicle Video Anomaly Detection
Jan 16, 2026Recent advances in video anomaly detection (VAD) mainly focus on ground-based surveillance or unmanned aerial vehicle (UAV) videos with static backgrounds, whereas research on UAV videos with dynamic backgrounds remains limited. Unlike static scenarios, dynamically captured UAV videos exhibit multi-source motion coupling, where the motion of objects and UAV-induced global motion are intricately intertwined. Consequently, existing methods may misclassify normal UAV movements as anomalies or fail to capture true anomalies concealed within dynamic backgrounds. Moreover, many approaches do not adequately address the joint modeling of inter-frame continuity and local spatial correlations across diverse temporal scales. To overcome these limitations, we propose the Frequency-Assisted Temporal Dilation Mamba (FTDMamba) network for UAV VAD, including two core components: (1) a Frequency Decoupled Spatiotemporal Correlation Module, which disentangles coupled motion patterns and models global spatiotemporal dependencies through frequency analysis; and (2) a Temporal Dilation Mamba Module, which leverages Mamba's sequence modeling capability to jointly learn fine-grained temporal dynamics and local spatial structures across multiple temporal receptive fields. Additionally, unlike existing UAV VAD datasets which focus on static backgrounds, we construct a large-scale Moving UAV VAD dataset (MUVAD), comprising 222,736 frames with 240 anomaly events across 12 anomaly types. Extensive experiments demonstrate that FTDMamba achieves state-of-the-art (SOTA) performance on two public static benchmarks and the new MUVAD dataset. The code and MUVAD dataset will be available at: https://github.com/uavano/FTDMamba.
RS-Prune: Training-Free Data Pruning at High Ratios for Efficient Remote Sensing Diffusion Foundation Models
Dec 29, 2025Diffusion-based remote sensing (RS) generative foundation models are cruial for downstream tasks. However, these models rely on large amounts of globally representative data, which often contain redundancy, noise, and class imbalance, reducing training efficiency and preventing convergence. Existing RS diffusion foundation models typically aggregate multiple classification datasets or apply simplistic deduplication, overlooking the distributional requirements of generation modeling and the heterogeneity of RS imagery. To address these limitations, we propose a training-free, two-stage data pruning approach that quickly select a high-quality subset under high pruning ratios, enabling a preliminary foundation model to converge rapidly and serve as a versatile backbone for generation, downstream fine-tuning, and other applications. Our method jointly considers local information content with global scene-level diversity and representativeness. First, an entropy-based criterion efficiently removes low-information samples. Next, leveraging RS scene classification datasets as reference benchmarks, we perform scene-aware clustering with stratified sampling to improve clustering effectiveness while reducing computational costs on large-scale unlabeled data. Finally, by balancing cluster-level uniformity and sample representativeness, the method enables fine-grained selection under high pruning ratios while preserving overall diversity and representativeness. Experiments show that, even after pruning 85\% of the training data, our method significantly improves convergence and generation quality. Furthermore, diffusion foundation models trained with our method consistently achieve state-of-the-art performance across downstream tasks, including super-resolution and semantic image synthesis. This data pruning paradigm offers practical guidance for developing RS generative foundation models.
Vehicle-centric Perception via Multimodal Structured Pre-training
Dec 22, 2025Vehicle-centric perception plays a crucial role in many intelligent systems, including large-scale surveillance systems, intelligent transportation, and autonomous driving. Existing approaches lack effective learning of vehicle-related knowledge during pre-training, resulting in poor capability for modeling general vehicle perception representations. To handle this problem, we propose VehicleMAE-V2, a novel vehicle-centric pre-trained large model. By exploring and exploiting vehicle-related multimodal structured priors to guide the masked token reconstruction process, our approach can significantly enhance the model's capability to learn generalizable representations for vehicle-centric perception. Specifically, we design the Symmetry-guided Mask Module (SMM), Contour-guided Representation Module (CRM) and Semantics-guided Representation Module (SRM) to incorporate three kinds of structured priors into token reconstruction including symmetry, contour and semantics of vehicles respectively. SMM utilizes the vehicle symmetry constraints to avoid retaining symmetric patches and can thus select high-quality masked image patches and reduce information redundancy. CRM minimizes the probability distribution divergence between contour features and reconstructed features and can thus preserve holistic vehicle structure information during pixel-level reconstruction. SRM aligns image-text features through contrastive learning and cross-modal distillation to address the feature confusion caused by insufficient semantic understanding during masked reconstruction. To support the pre-training of VehicleMAE-V2, we construct Autobot4M, a large-scale dataset comprising approximately 4 million vehicle images and 12,693 text descriptions. Extensive experiments on five downstream tasks demonstrate the superior performance of VehicleMAE-V2.
Pedestrian Attribute Recognition via Hierarchical Cross-Modality HyperGraph Learning
Sep 26, 2025Current Pedestrian Attribute Recognition (PAR) algorithms typically focus on mapping visual features to semantic labels or attempt to enhance learning by fusing visual and attribute information. However, these methods fail to fully exploit attribute knowledge and contextual information for more accurate recognition. Although recent works have started to consider using attribute text as additional input to enhance the association between visual and semantic information, these methods are still in their infancy. To address the above challenges, this paper proposes the construction of a multi-modal knowledge graph, which is utilized to mine the relationships between local visual features and text, as well as the relationships between attributes and extensive visual context samples. Specifically, we propose an effective multi-modal knowledge graph construction method that fully considers the relationships among attributes and the relationships between attributes and vision tokens. To effectively model these relationships, this paper introduces a knowledge graph-guided cross-modal hypergraph learning framework to enhance the standard pedestrian attribute recognition framework. Comprehensive experiments on multiple PAR benchmark datasets have thoroughly demonstrated the effectiveness of our proposed knowledge graph for the PAR task, establishing a strong foundation for knowledge-guided pedestrian attribute recognition. The source code of this paper will be released on https://github.com/Event-AHU/OpenPAR
Harmonizing and Merging Source Models for CLIP-based Domain Generalization
Jun 11, 2025CLIP-based domain generalization aims to improve model generalization to unseen domains by leveraging the powerful zero-shot classification capabilities of CLIP and multiple source datasets. Existing methods typically train a single model across multiple source domains to capture domain-shared information. However, this paradigm inherently suffers from two types of conflicts: 1) sample conflicts, arising from noisy samples and extreme domain shifts among sources; and 2) optimization conflicts, stemming from competition and trade-offs during multi-source training. Both hinder the generalization and lead to suboptimal solutions. Recent studies have shown that model merging can effectively mitigate the competition of multi-objective optimization and improve generalization performance. Inspired by these findings, we propose Harmonizing and Merging (HAM), a novel source model merging framework for CLIP-based domain generalization. During the training process of the source models, HAM enriches the source samples without conflicting samples, and harmonizes the update directions of all models. Then, a redundancy-aware historical model merging method is introduced to effectively integrate knowledge across all source models. HAM comprehensively consolidates source domain information while enabling mutual enhancement among source models, ultimately yielding a final model with optimal generalization capabilities. Extensive experiments on five widely used benchmark datasets demonstrate the effectiveness of our approach, achieving state-of-the-art performance.
ICPL-ReID: Identity-Conditional Prompt Learning for Multi-Spectral Object Re-Identification
May 23, 2025



Multi-spectral object re-identification (ReID) brings a new perception perspective for smart city and intelligent transportation applications, effectively addressing challenges from complex illumination and adverse weather. However, complex modal differences between heterogeneous spectra pose challenges to efficiently utilizing complementary and discrepancy of spectra information. Most existing methods fuse spectral data through intricate modal interaction modules, lacking fine-grained semantic understanding of spectral information (\textit{e.g.}, text descriptions, part masks, and object keypoints). To solve this challenge, we propose a novel Identity-Conditional text Prompt Learning framework (ICPL), which exploits the powerful cross-modal alignment capability of CLIP, to unify different spectral visual features from text semantics. Specifically, we first propose the online prompt learning using learnable text prompt as the identity-level semantic center to bridge the identity semantics of different spectra in online manner. Then, in lack of concrete text descriptions, we propose the multi-spectral identity-condition module to use identity prototype as spectral identity condition to constraint prompt learning. Meanwhile, we construct the alignment loop mutually optimizing the learnable text prompt and spectral visual encoder to avoid online prompt learning disrupting the pre-trained text-image alignment distribution. In addition, to adapt to small-scale multi-spectral data and mitigate style differences between spectra, we propose multi-spectral adapter that employs a low-rank adaption method to learn spectra-specific features. Comprehensive experiments on 5 benchmarks, including RGBNT201, Market-MM, MSVR310, RGBN300, and RGBNT100, demonstrate that the proposed method outperforms the state-of-the-art methods.
Towards Low-Latency Event Stream-based Visual Object Tracking: A Slow-Fast Approach
May 19, 2025Existing tracking algorithms typically rely on low-frame-rate RGB cameras coupled with computationally intensive deep neural network architectures to achieve effective tracking. However, such frame-based methods inherently face challenges in achieving low-latency performance and often fail in resource-constrained environments. Visual object tracking using bio-inspired event cameras has emerged as a promising research direction in recent years, offering distinct advantages for low-latency applications. In this paper, we propose a novel Slow-Fast Tracking paradigm that flexibly adapts to different operational requirements, termed SFTrack. The proposed framework supports two complementary modes, i.e., a high-precision slow tracker for scenarios with sufficient computational resources, and an efficient fast tracker tailored for latency-aware, resource-constrained environments. Specifically, our framework first performs graph-based representation learning from high-temporal-resolution event streams, and then integrates the learned graph-structured information into two FlashAttention-based vision backbones, yielding the slow and fast trackers, respectively. The fast tracker achieves low latency through a lightweight network design and by producing multiple bounding box outputs in a single forward pass. Finally, we seamlessly combine both trackers via supervised fine-tuning and further enhance the fast tracker's performance through a knowledge distillation strategy. Extensive experiments on public benchmarks, including FE240, COESOT, and EventVOT, demonstrate the effectiveness and efficiency of our proposed method across different real-world scenarios. The source code has been released on https://github.com/Event-AHU/SlowFast_Event_Track.
Dynamic Graph Induced Contour-aware Heat Conduction Network for Event-based Object Detection
May 19, 2025Event-based Vision Sensors (EVS) have demonstrated significant advantages over traditional RGB frame-based cameras in low-light conditions, high-speed motion capture, and low latency. Consequently, object detection based on EVS has attracted increasing attention from researchers. Current event stream object detection algorithms are typically built upon Convolutional Neural Networks (CNNs) or Transformers, which either capture limited local features using convolutional filters or incur high computational costs due to the utilization of self-attention. Recently proposed vision heat conduction backbone networks have shown a good balance between efficiency and accuracy; however, these models are not specifically designed for event stream data. They exhibit weak capability in modeling object contour information and fail to exploit the benefits of multi-scale features. To address these issues, this paper proposes a novel dynamic graph induced contour-aware heat conduction network for event stream based object detection, termed CvHeat-DET. The proposed model effectively leverages the clear contour information inherent in event streams to predict the thermal diffusivity coefficients within the heat conduction model, and integrates hierarchical structural graph features to enhance feature learning across multiple scales. Extensive experiments on three benchmark datasets for event stream-based object detection fully validated the effectiveness of the proposed model. The source code of this paper will be released on https://github.com/Event-AHU/OpenEvDET.
RB-SCD: A New Benchmark for Semantic Change Detection of Roads and Bridges in Traffic Scenes
May 19, 2025


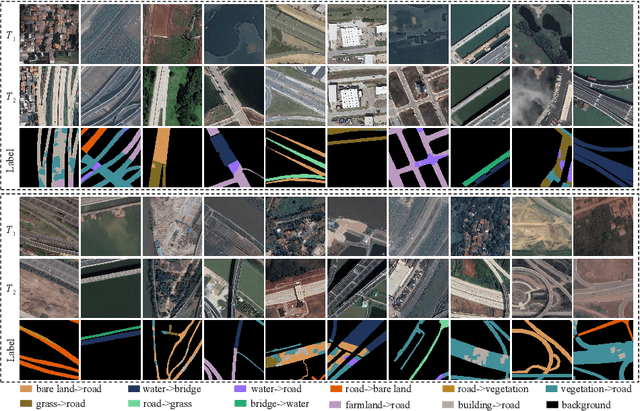
Accurate detection of changes in roads and bridges, such as construction, renovation, and demolition, is essential for urban planning and traffic management. However, existing methods often struggle to extract fine-grained semantic change information due to the lack of high-quality annotated datasets in traffic scenarios. To address this, we introduce the Road and Bridge Semantic Change Detection (RB-SCD) dataset, a comprehensive benchmark comprising 260 pairs of high-resolution remote sensing images from diverse cities and countries. RB-SCD captures 11 types of semantic changes across varied road and bridge structures, enabling detailed structural and functional analysis. Building on this dataset, we propose a novel framework, Multimodal Frequency-Driven Change Detector (MFDCD), which integrates multimodal features in the frequency domain. MFDCD includes a Dynamic Frequency Coupler (DFC) that fuses hierarchical visual features with wavelet-based frequency components, and a Textual Frequency Filter (TFF) that transforms CLIP-derived textual features into the frequency domain and applies graph-based filtering. Experimental results on RB-SCD and three public benchmarks demonstrate the effectiveness of our approach.
CM3AE: A Unified RGB Frame and Event-Voxel/-Frame Pre-training Framework
Apr 17, 2025Event cameras have attracted increasing attention in recent years due to their advantages in high dynamic range, high temporal resolution, low power consumption, and low latency. Some researchers have begun exploring pre-training directly on event data. Nevertheless, these efforts often fail to establish strong connections with RGB frames, limiting their applicability in multi-modal fusion scenarios. To address these issues, we propose a novel CM3AE pre-training framework for the RGB-Event perception. This framework accepts multi-modalities/views of data as input, including RGB images, event images, and event voxels, providing robust support for both event-based and RGB-event fusion based downstream tasks. Specifically, we design a multi-modal fusion reconstruction module that reconstructs the original image from fused multi-modal features, explicitly enhancing the model's ability to aggregate cross-modal complementary information. Additionally, we employ a multi-modal contrastive learning strategy to align cross-modal feature representations in a shared latent space, which effectively enhances the model's capability for multi-modal understanding and capturing global dependencies. We construct a large-scale dataset containing 2,535,759 RGB-Event data pairs for the pre-training. Extensive experiments on five downstream tasks fully demonstrated the effectiveness of CM3AE. Source code and pre-trained models will be released on https://github.com/Event-AHU/CM3AE.