 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFTDMamba: Frequency-Assisted Temporal Dilation Mamba for Unmanned Aerial Vehicle Video Anomaly Detection
Jan 16, 2026Recent advances in video anomaly detection (VAD) mainly focus on ground-based surveillance or unmanned aerial vehicle (UAV) videos with static backgrounds, whereas research on UAV videos with dynamic backgrounds remains limited. Unlike static scenarios, dynamically captured UAV videos exhibit multi-source motion coupling, where the motion of objects and UAV-induced global motion are intricately intertwined. Consequently, existing methods may misclassify normal UAV movements as anomalies or fail to capture true anomalies concealed within dynamic backgrounds. Moreover, many approaches do not adequately address the joint modeling of inter-frame continuity and local spatial correlations across diverse temporal scales. To overcome these limitations, we propose the Frequency-Assisted Temporal Dilation Mamba (FTDMamba) network for UAV VAD, including two core components: (1) a Frequency Decoupled Spatiotemporal Correlation Module, which disentangles coupled motion patterns and models global spatiotemporal dependencies through frequency analysis; and (2) a Temporal Dilation Mamba Module, which leverages Mamba's sequence modeling capability to jointly learn fine-grained temporal dynamics and local spatial structures across multiple temporal receptive fields. Additionally, unlike existing UAV VAD datasets which focus on static backgrounds, we construct a large-scale Moving UAV VAD dataset (MUVAD), comprising 222,736 frames with 240 anomaly events across 12 anomaly types. Extensive experiments demonstrate that FTDMamba achieves state-of-the-art (SOTA) performance on two public static benchmarks and the new MUVAD dataset. The code and MUVAD dataset will be available at: https://github.com/uavano/FTDMamba.
LEGNet: Lightweight Edge-Gaussian Driven Network for Low-Quality Remote Sensing Image Object Detection
Mar 18, 2025
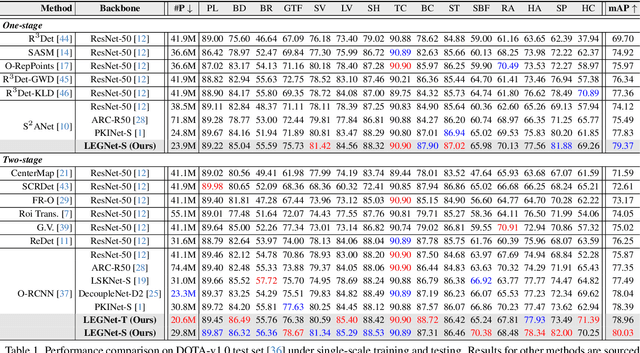

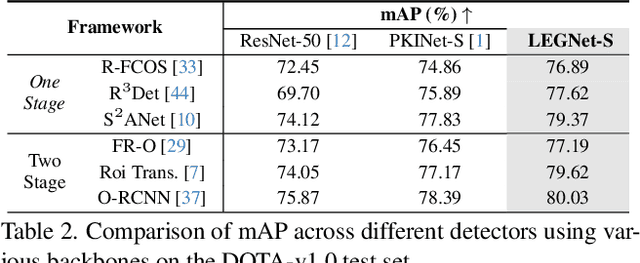
Remote sensing object detection (RSOD) faces formidable challenges in complex visual environments. Aerial and satellite images inherently suffer from limitations such as low spatial resolution, sensor noise, blurred objects, low-light degradation, and partial occlusions. These degradation factors collectively compromise the feature discriminability in detection models, resulting in three key issues: (1) reduced contrast that hampers foreground-background separation, (2) structural discontinuities in edge representations, and (3) ambiguous feature responses caused by variations in illumination. These collectively weaken model robustness and deployment feasibility. To address these challenges, we propose LEGNet, a lightweight network that incorporates a novel edge-Gaussian aggregation (EGA) module specifically designed for low-quality remote sensing images. Our key innovation lies in the synergistic integration of Scharr operator-based edge priors with uncertainty-aware Gaussian modeling: (a) The orientation-aware Scharr filters preserve high-frequency edge details with rotational invariance; (b) The uncertainty-aware Gaussian layers probabilistically refine low-confidence features through variance estimation. This design enables precision enhancement while maintaining architectural simplicity. Comprehensive evaluations across four RSOD benchmarks (DOTA-v1.0, v1.5, DIOR-R, FAIR1M-v1.0) and a UAV-view dataset (VisDrone2019) demonstrate significant improvements. LEGNet achieves state-of-the-art performance across five benchmark datasets while ensuring computational efficiency, making it well-suited for deployment on resource-constrained edge devices in real-world remote sensing applications. The code is available at https://github.com/lwCVer/LEGNet.