 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS3KF: Spherical State-Space Kalman Filtering for Panoramic 3D Multi-Object Tracking
Mar 29, 2026Panoramic multi-object tracking is important for industrial safety monitoring, wide-area robotic perception, and infrastructure-light deployment in large workspaces. In these settings, the sensing system must provide full-surround coverage, metric geometric cues, and stable target association under wide field-of-view distortion and occlusion. Existing image-plane trackers are tightly coupled to the camera projection and become unreliable in panoramic imagery, while conventional Euclidean 3D formulations introduce redundant directional parameters and do not naturally unify angular, scale, and depth estimation. In this paper, we present $\mathbf{S^3KF}$, a panoramic 3D multi-object tracking framework built on a motorized rotating LiDAR and a quad-fisheye camera rig. The key idea is a geometry-consistent state representation on the unit sphere $\mathbb{S}^2$, where object bearing is modeled by a two-degree-of-freedom tangent-plane parameterization and jointly estimated with box scale and depth dynamics. Based on this state, we derive an extended spherical Kalman filtering pipeline that fuses panoramic camera detections with LiDAR depth observations for multimodal tracking. We further establish a map-based ground-truth generation pipeline using wearable localization devices registered to a shared global LiDAR map, enabling quantitative evaluation without motion-capture infrastructure. Experiments on self-collected real-world sequences show decimeter-level planar tracking accuracy, improved identity continuity over a 2D panoramic baseline in dynamic scenes, and real-time onboard operation on a Jetson AGX Orin platform. These results indicate that the proposed framework is a practical solution for panoramic perception and industrial-scale multi-object tracking.The project page can be found at https://kafeiyin00.github.io/S3KF/.
Line-of-Sight-Constrained Multi-Robot Mapless Navigation via Polygonal Visible Regions
Mar 27, 2026Multi-robot systems rely on underlying connectivity to ensure reliable communication and timely coordination. This paper studies the line-of-sight (LoS) connectivity maintenance problem in multi-robot navigation with unknown obstacles. Prior works typically assume known environment maps to formulate LoS constraints between robots, which hinders their practical deployment. To overcome this limitation, we propose an inherently distributed approach where each robot only constructs an egocentric visible region based on its real-time LiDAR scans, instead of endeavoring to build a global map online. The individual visible regions are shared through distributed communication to establish inter-robot LoS constraints, which are then incorporated into a multi-robot navigation framework to ensure LoS-connectivity. Moreover, we enhance the robustness of connectivity maintenance by proposing a more accurate LoS-distance metric, which further enables flexible topology optimization that eliminates redundant and effort-demanding connections. The proposed framework is evaluated through extensive multi-robot navigation and exploration tasks in both simulation and real-world experiments. Results show that it reliably maintains LoS-connectivity between robots in challenging environments cluttered with obstacles, even under large visible ranges and fragile minimal topologies, where existing methods consistently fail. Ablation studies also reveal that topology optimization boosts navigation efficiency by around $20\%$, demonstrating the framework's potential for efficient navigation under connectivity constraints.
OmniVLN: Omnidirectional 3D Perception and Token-Efficient LLM Reasoning for Visual-Language Navigation across Air and Ground Platforms
Mar 18, 2026Language-guided embodied navigation requires an agent to interpret object-referential instructions, search across multiple rooms, localize the referenced target, and execute reliable motion toward it. Existing systems remain limited in real indoor environments because narrow field-of-view sensing exposes only a partial local scene at each step, often forcing repeated rotations, delaying target discovery, and producing fragmented spatial understanding; meanwhile, directly prompting LLMs with dense 3D maps or exhaustive object lists quickly exceeds the context budget. We present OmniVLN, a zero-shot visual-language navigation framework that couples omnidirectional 3D perception with token-efficient hierarchical reasoning for both aerial and ground robots. OmniVLN fuses a rotating LiDAR and panoramic vision into a hardware-agnostic mapping stack, incrementally constructs a five-layer Dynamic Scene Graph (DSG) from mesh geometry to room- and building-level structure, and stabilizes high-level topology through persistent-homology-based room partitioning and hybrid geometric/VLM relation verification. For navigation, the global DSG is transformed into an agent-centric 3D octant representation with multi-resolution spatial attention prompting, enabling the LLM to progressively filter candidate rooms, infer egocentric orientation, localize target objects, and emit executable navigation primitives while preserving fine local detail and compact long-range memory. Experiments show that the proposed hierarchical interface improves spatial referring accuracy from 77.27\% to 93.18\%, reduces cumulative prompt tokens by up to 61.7\% in cluttered multi-room settings, and improves navigation success by up to 11.68\% over a flat-list baseline. We will release the code and an omnidirectional multimodal dataset to support reproducible research.
Energy-Constrained Navigation for Planetary Rovers under Hybrid RTG-Solar Power
Sep 18, 2025Future planetary exploration rovers must operate for extended durations on hybrid power inputs that combine steady radioisotope thermoelectric generator (RTG) output with variable solar photovoltaic (PV) availability. While energy-aware planning has been studied for aerial and underwater robots under battery limits, few works for ground rovers explicitly model power flow or enforce instantaneous power constraints. Classical terrain-aware planners emphasize slope or traversability, and trajectory optimization methods typically focus on geometric smoothness and dynamic feasibility, neglecting energy feasibility. We present an energy-constrained trajectory planning framework that explicitly integrates physics-based models of translational, rotational, and resistive power with baseline subsystem loads, under hybrid RTG-solar input. By incorporating both cumulative energy budgets and instantaneous power constraints into SE(2)-based polynomial trajectory optimization, the method ensures trajectories that are simultaneously smooth, dynamically feasible, and power-compliant. Simulation results on lunar-like terrain show that our planner generates trajectories with peak power within 0.55 percent of the prescribed limit, while existing methods exceed limits by over 17 percent. This demonstrates a principled and practical approach to energy-aware autonomy for long-duration planetary missions.
AEOS: Active Environment-aware Optimal Scanning Control for UAV LiDAR-Inertial Odometry in Complex Scenes
Sep 11, 2025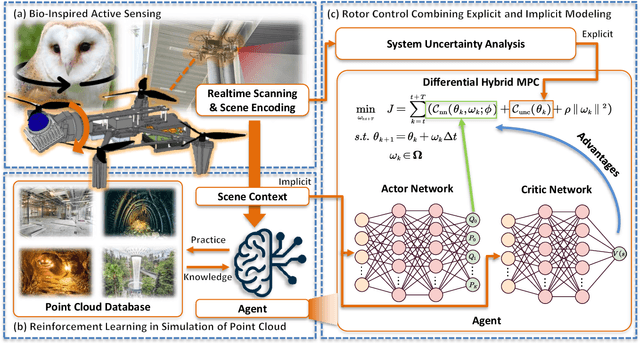

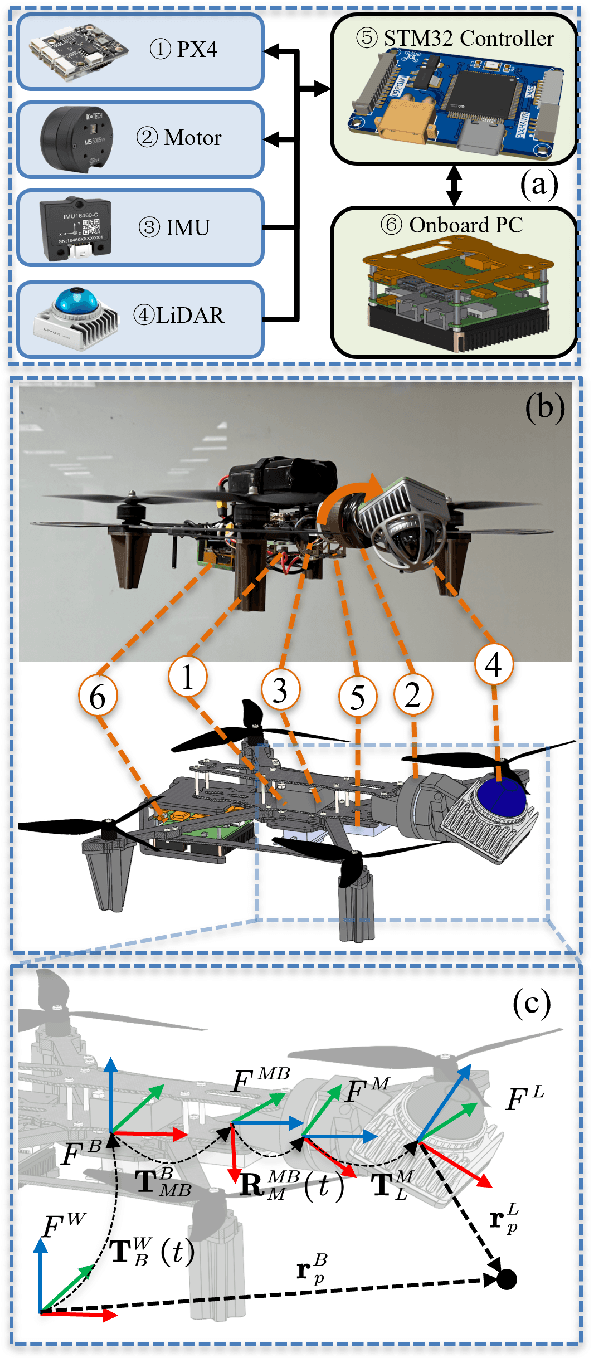
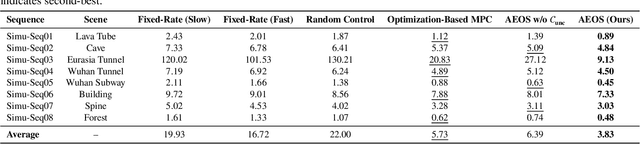
LiDAR-based 3D perception and localization on unmanned aerial vehicles (UAVs) are fundamentally limited by the narrow field of view (FoV) of compact LiDAR sensors and the payload constraints that preclude multi-sensor configurations. Traditional motorized scanning systems with fixed-speed rotations lack scene awareness and task-level adaptability, leading to degraded odometry and mapping performance in complex, occluded environments. Inspired by the active sensing behavior of owls, we propose AEOS (Active Environment-aware Optimal Scanning), a biologically inspired and computationally efficient framework for adaptive LiDAR control in UAV-based LiDAR-Inertial Odometry (LIO). AEOS combines model predictive control (MPC) and reinforcement learning (RL) in a hybrid architecture: an analytical uncertainty model predicts future pose observability for exploitation, while a lightweight neural network learns an implicit cost map from panoramic depth representations to guide exploration. To support scalable training and generalization, we develop a point cloud-based simulation environment with real-world LiDAR maps across diverse scenes, enabling sim-to-real transfer. Extensive experiments in both simulation and real-world environments demonstrate that AEOS significantly improves odometry accuracy compared to fixed-rate, optimization-only, and fully learned baselines, while maintaining real-time performance under onboard computational constraints. The project page can be found at https://kafeiyin00.github.io/AEOS/.
Tire Wear Aware Trajectory Tracking Control for Multi-axle Swerve-drive Autonomous Mobile Robots
Jun 05, 2025Multi-axle Swerve-drive Autonomous Mobile Robots (MS-AGVs) equipped with independently steerable wheels are commonly used for high-payload transportation. In this work, we present a novel model predictive control (MPC) method for MS-AGV trajectory tracking that takes tire wear minimization consideration in the objective function. To speed up the problem-solving process, we propose a hierarchical controller design and simplify the dynamic model by integrating the \textit{magic formula tire model} and \textit{simplified tire wear model}. In the experiment, the proposed method can be solved by simulated annealing in real-time on a normal personal computer and by incorporating tire wear into the objective function, tire wear is reduced by 19.19\% while maintaining the tracking accuracy in curve-tracking experiments. In the more challenging scene: the desired trajectory is offset by 60 degrees from the vehicle's heading, the reduction in tire wear increased to 65.20\% compared to the kinematic model without considering the tire wear optimization.
Unsupervised Anomaly Detection for Autonomous Robots via Mahalanobis SVDD with Audio-IMU Fusion
May 09, 2025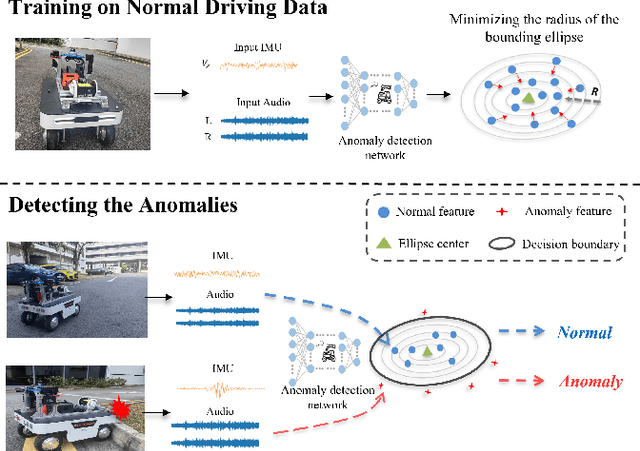
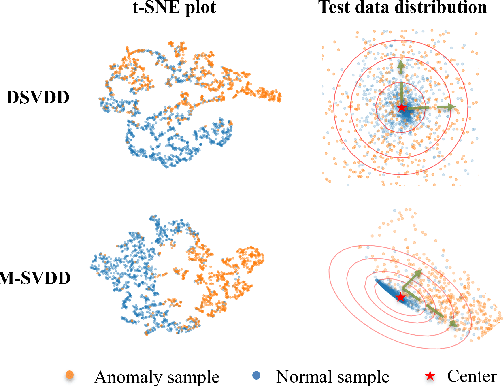
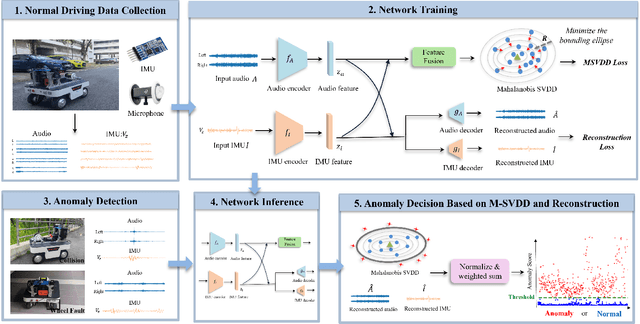
Reliable anomaly detection is essential for ensuring the safety of autonomous robots, particularly when conventional detection systems based on vision or LiDAR become unreliable in adverse or unpredictable conditions. In such scenarios, alternative sensing modalities are needed to provide timely and robust feedback. To this end, we explore the use of audio and inertial measurement unit (IMU) sensors to detect underlying anomalies in autonomous mobile robots, such as collisions and internal mechanical faults. Furthermore, to address the challenge of limited labeled anomaly data, we propose an unsupervised anomaly detection framework based on Mahalanobis Support Vector Data Description (M-SVDD). In contrast to conventional SVDD methods that rely on Euclidean distance and assume isotropic feature distributions, our approach employs the Mahalanobis distance to adaptively scale feature dimensions and capture inter-feature correlations, enabling more expressive decision boundaries. In addition, a reconstruction-based auxiliary branch is introduced to preserve feature diversity and prevent representation collapse, further enhancing the robustness of anomaly detection. Extensive experiments on a collected mobile robot dataset and four public datasets demonstrate the effectiveness of the proposed method, as shown in the video https://youtu.be/yh1tn6DDD4A. Code and dataset are available at https://github.com/jamesyang7/M-SVDD.
Following Is All You Need: Robot Crowd Navigation Using People As Planners
Apr 15, 2025Navigating in crowded environments requires the robot to be equipped with high-level reasoning and planning techniques. Existing works focus on developing complex and heavyweight planners while ignoring the role of human intelligence. Since humans are highly capable agents who are also widely available in a crowd navigation setting, we propose an alternative scheme where the robot utilises people as planners to benefit from their effective planning decisions and social behaviours. Through a set of rule-based evaluations, we identify suitable human leaders who exhibit the potential to guide the robot towards its goal. Using a simple base planner, the robot follows the selected leader through shorthorizon subgoals that are designed to be straightforward to achieve. We demonstrate through both simulated and real-world experiments that our novel framework generates safe and efficient robot plans compared to existing planners, even without predictive or data-driven modules. Our method also brings human-like robot behaviours without explicitly defining traffic rules and social norms. Code will be available at https://github.com/centiLinda/PeopleAsPlanner.git.
Handle Object Navigation as Weighted Traveling Repairman Problem
Mar 10, 2025Zero-Shot Object Navigation (ZSON) requires agents to navigate to objects specified via open-ended natural language without predefined categories or prior environmental knowledge. While recent methods leverage foundation models or multi-modal maps, they often rely on 2D representations and greedy strategies or require additional training or modules with high computation load, limiting performance in complex environments and real applications. We propose WTRP-Searcher, a novel framework that formulates ZSON as a Weighted Traveling Repairman Problem (WTRP), minimizing the weighted waiting time of viewpoints. Using a Vision-Language Model (VLM), we score viewpoints based on object-description similarity, projected onto a 2D map with depth information. An open-vocabulary detector identifies targets, dynamically updating goals, while a 3D embedding feature map enhances spatial awareness and environmental recall. WTRP-Searcher outperforms existing methods, offering efficient global planning and improved performance in complex ZSON tasks. Code and more demos will be avaliable on https://github.com/lrm20011/WTRP_Searcher.
LiMo-Calib: On-Site Fast LiDAR-Motor Calibration for Quadruped Robot-Based Panoramic 3D Sensing System
Feb 18, 2025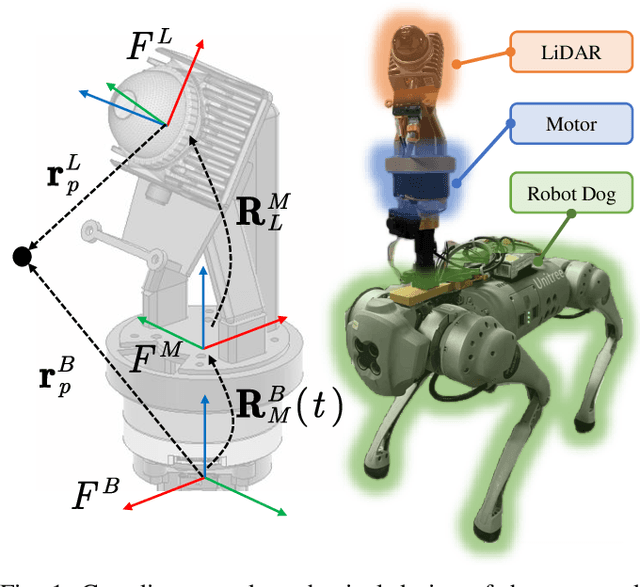
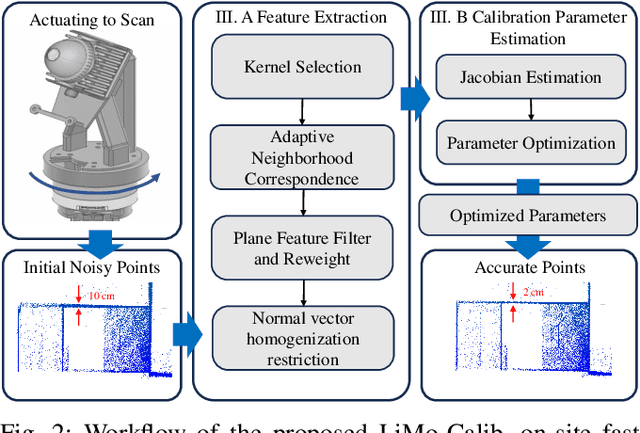
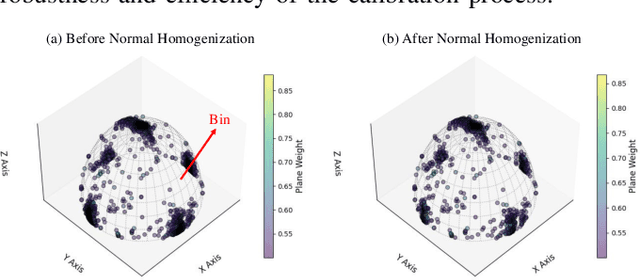

Conventional single LiDAR systems are inherently constrained by their limited field of view (FoV), leading to blind spots and incomplete environmental awareness, particularly on robotic platforms with strict payload limitations. Integrating a motorized LiDAR offers a practical solution by significantly expanding the sensor's FoV and enabling adaptive panoramic 3D sensing. However, the high-frequency vibrations of the quadruped robot introduce calibration challenges, causing variations in the LiDAR-motor transformation that degrade sensing accuracy. Existing calibration methods that use artificial targets or dense feature extraction lack feasibility for on-site applications and real-time implementation. To overcome these limitations, we propose LiMo-Calib, an efficient on-site calibration method that eliminates the need for external targets by leveraging geometric features directly from raw LiDAR scans. LiMo-Calib optimizes feature selection based on normal distribution to accelerate convergence while maintaining accuracy and incorporates a reweighting mechanism that evaluates local plane fitting quality to enhance robustness. We integrate and validate the proposed method on a motorized LiDAR system mounted on a quadruped robot, demonstrating significant improvements in calibration efficiency and 3D sensing accuracy, making LiMo-Calib well-suited for real-world robotic applications. The demo video is available at: https://youtu.be/FMINa-sap7g