 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Target Encirclement and Interception with Noisy Range Observations
Aug 11, 2025This paper proposes a strategy to encircle and intercept a non-cooperative aerial point-mass moving target by leveraging noisy range measurements for state estimation. In this approach, the guardians actively ensure the observability of the target by using an anti-synchronization (AS), 3D ``vibrating string" trajectory, which enables rapid position and velocity estimation based on the Kalman filter. Additionally, a novel anti-target controller is designed for the guardians to enable adaptive transitions from encircling a protected target to encircling, intercepting, and neutralizing a hostile target, taking into consideration the input constraints of the guardians. Based on the guaranteed uniform observability, the exponentially bounded stability of the state estimation error and the convergence of the encirclement error are rigorously analyzed. Simulation results and real-world UAV experiments are presented to further validate the effectiveness of the system design.
Autonomous 3D Moving Target Encirclement and Interception with Range measurement
Jun 16, 2025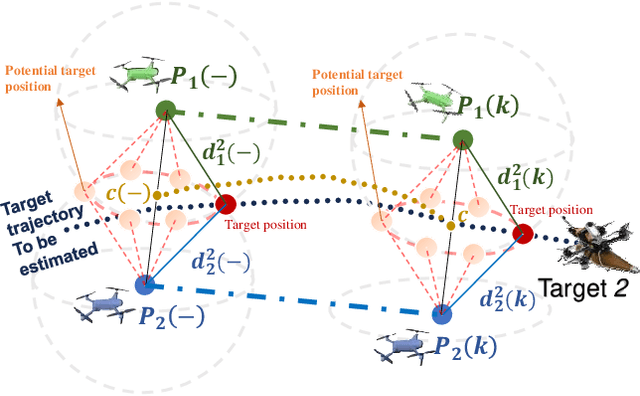
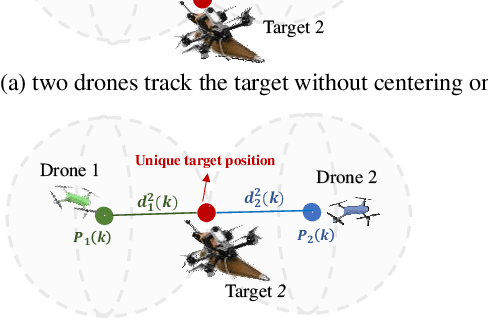
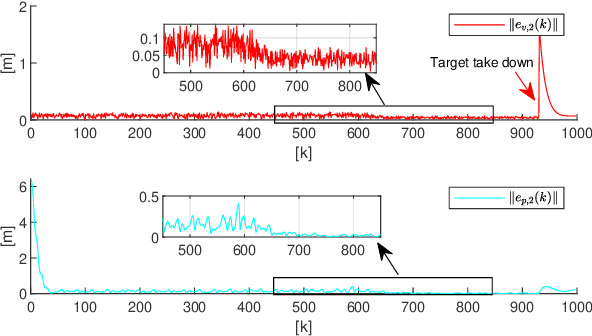
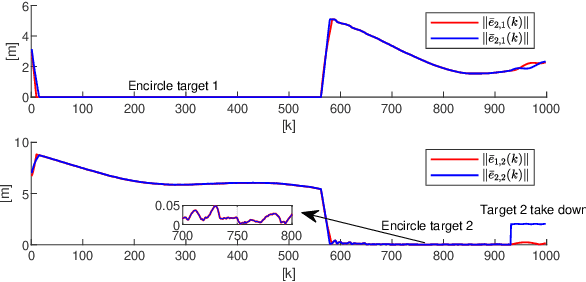
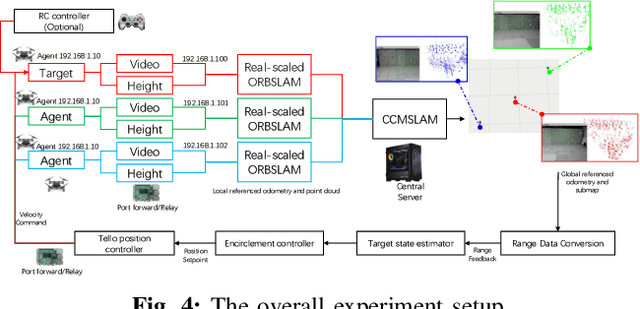
Commercial UAVs are an emerging security threat as they are capable of carrying hazardous payloads or disrupting air traffic. To counter UAVs, we introduce an autonomous 3D target encirclement and interception strategy. Unlike traditional ground-guided systems, this strategy employs autonomous drones to track and engage non-cooperative hostile UAVs, which is effective in non-line-of-sight conditions, GPS denial, and radar jamming, where conventional detection and neutralization from ground guidance fail. Using two noisy real-time distances measured by drones, guardian drones estimate the relative position from their own to the target using observation and velocity compensation methods, based on anti-synchronization (AS) and an X$-$Y circular motion combined with vertical jitter. An encirclement control mechanism is proposed to enable UAVs to adaptively transition from encircling and protecting a target to encircling and monitoring a hostile target. Upon breaching a warning threshold, the UAVs may even employ a suicide attack to neutralize the hostile target. We validate this strategy through real-world UAV experiments and simulated analysis in MATLAB, demonstrating its effectiveness in detecting, encircling, and intercepting hostile drones. More details: https://youtu.be/5eHW56lPVto.
Underwater target 6D State Estimation via UUV Attitude Enhance Observability
Jun 16, 2025Accurate relative state observation of Unmanned Underwater Vehicles (UUVs) for tracking uncooperative targets remains a significant challenge due to the absence of GPS, complex underwater dynamics, and sensor limitations. Existing localization approaches rely on either global positioning infrastructure or multi-UUV collaboration, both of which are impractical for a single UUV operating in large or unknown environments. To address this, we propose a novel persistent relative 6D state estimation framework that enables a single UUV to estimate its relative motion to a non-cooperative target using only successive noisy range measurements from two monostatic sonar sensors. Our key contribution is an observability-enhanced attitude control strategy, which optimally adjusts the UUV's orientation to improve the observability of relative state estimation using a Kalman filter, effectively mitigating the impact of sensor noise and drift accumulation. Additionally, we introduce a rigorously proven Lyapunov-based tracking control strategy that guarantees long-term stability by ensuring that the UUV maintains an optimal measurement range, preventing localization errors from diverging over time. Through theoretical analysis and simulations, we demonstrate that our method significantly improves 6D relative state estimation accuracy and robustness compared to conventional approaches. This work provides a scalable, infrastructure-free solution for UUVs tracking uncooperative targets underwater.
Tire Wear Aware Trajectory Tracking Control for Multi-axle Swerve-drive Autonomous Mobile Robots
Jun 05, 2025Multi-axle Swerve-drive Autonomous Mobile Robots (MS-AGVs) equipped with independently steerable wheels are commonly used for high-payload transportation. In this work, we present a novel model predictive control (MPC) method for MS-AGV trajectory tracking that takes tire wear minimization consideration in the objective function. To speed up the problem-solving process, we propose a hierarchical controller design and simplify the dynamic model by integrating the \textit{magic formula tire model} and \textit{simplified tire wear model}. In the experiment, the proposed method can be solved by simulated annealing in real-time on a normal personal computer and by incorporating tire wear into the objective function, tire wear is reduced by 19.19\% while maintaining the tracking accuracy in curve-tracking experiments. In the more challenging scene: the desired trajectory is offset by 60 degrees from the vehicle's heading, the reduction in tire wear increased to 65.20\% compared to the kinematic model without considering the tire wear optimization.
AirSwarm: Enabling Cost-Effective Multi-UAV Research with COTS drones
Mar 10, 2025Traditional unmanned aerial vehicle (UAV) swarm missions rely heavily on expensive custom-made drones with onboard perception or external positioning systems, limiting their widespread adoption in research and education. To address this issue, we propose AirSwarm. AirSwarm democratizes multi-drone coordination using low-cost commercially available drones such as Tello or Anafi, enabling affordable swarm aerial robotics research and education. Key innovations include a hierarchical control architecture for reliable multi-UAV coordination, an infrastructure-free visual SLAM system for precise localization without external motion capture, and a ROS-based software framework for simplified swarm development. Experiments demonstrate cm-level tracking accuracy, low-latency control, communication failure resistance, formation flight, and trajectory tracking. By reducing financial and technical barriers, AirSwarm makes multi-robot education and research more accessible. The complete instructions and open source code will be available at
Non-cooperative Stochastic Target Encirclement by Anti-synchronization Control via Range-only Measurement
Feb 08, 2025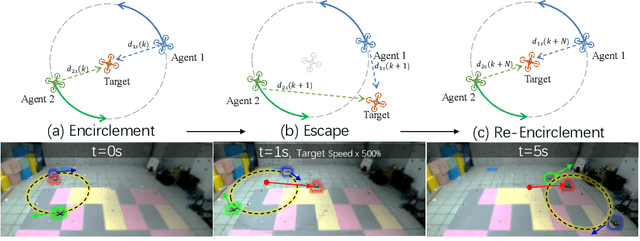
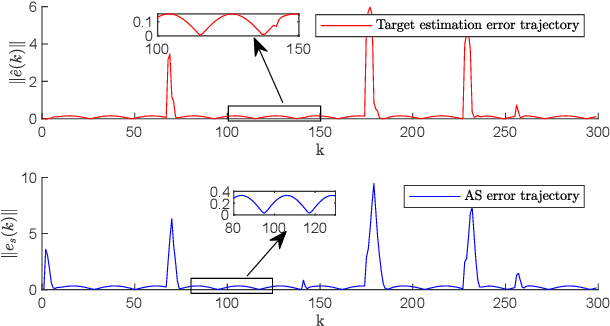
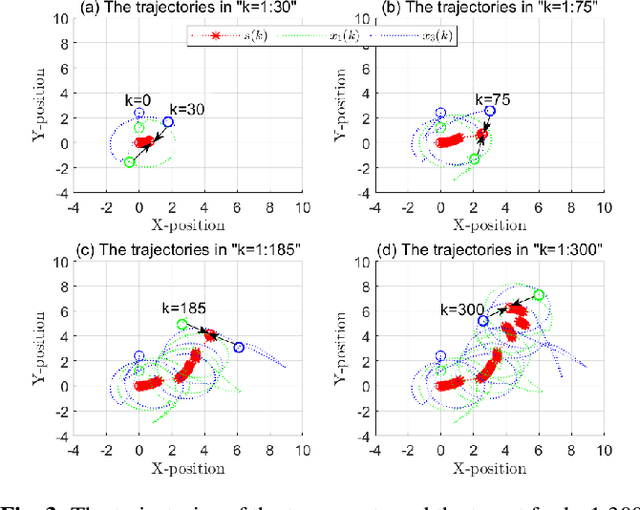
This paper investigates the stochastic moving target encirclement problem in a realistic setting. In contrast to typical assumptions in related works, the target in our work is non-cooperative and capable of escaping the circle containment by boosting its speed to maximum for a short duration. Considering the extreme environment, such as GPS denial, weight limit, and lack of ground guidance, two agents can only rely on their onboard single-modality perception tools to measure the distances to the target. The distance measurement allows for creating a position estimator by providing a target position-dependent variable. Furthermore, the construction of the unique distributed anti-synchronization controller (DASC) can guarantee that the two agents track and encircle the target swiftly. The convergence of the estimator and controller is rigorously evaluated using the Lyapunov technique. A real-world UAV-based experiment is conducted to illustrate the performance of the proposed methodology in addition to a simulated Matlab numerical sample. Our video demonstration can be found in the URL https://youtu.be/JXu1gib99yQ.
Swept Volume-Aware Trajectory Planning and MPC Tracking for Multi-Axle Swerve-Drive AMRs
Dec 22, 2024



Multi-axle autonomous mobile robots (AMRs) are set to revolutionize the future of robotics in logistics. As the backbone of next-generation solutions, these robots face a critical challenge: managing and minimizing the swept volume during turns while maintaining precise control. Traditional systems designed for standard vehicles often struggle with the complex dynamics of multi-axle configurations, leading to inefficiency and increased safety risk in confined spaces. Our innovative framework overcomes these limitations by combining swept volume minimization with Signed Distance Field (SDF) path planning and model predictive control (MPC) for independent wheel steering. This approach not only plans paths with an awareness of the swept volume but actively minimizes it in real-time, allowing each axle to follow a precise trajectory while significantly reducing the space the vehicle occupies. By predicting future states and adjusting the turning radius of each wheel, our method enhances both maneuverability and safety, even in the most constrained environments. Unlike previous works, our solution goes beyond basic path calculation and tracking, offering real-time path optimization with minimal swept volume and efficient individual axle control. To our knowledge, this is the first comprehensive approach to tackle these challenges, delivering life-saving improvements in control, efficiency, and safety for multi-axle AMRs. Furthermore, we will open-source our work to foster collaboration and enable others to advance safer, more efficient autonomous systems.
Unsupervised UAV 3D Trajectories Estimation with Sparse Point Clouds
Dec 17, 2024Compact UAV systems, while advancing delivery and surveillance, pose significant security challenges due to their small size, which hinders detection by traditional methods. This paper presents a cost-effective, unsupervised UAV detection method using spatial-temporal sequence processing to fuse multiple LiDAR scans for accurate UAV tracking in real-world scenarios. Our approach segments point clouds into foreground and background, analyzes spatial-temporal data, and employs a scoring mechanism to enhance detection accuracy. Tested on a public dataset, our solution placed 4th in the CVPR 2024 UG2+ Challenge, demonstrating its practical effectiveness. We plan to open-source all designs, code, and sample data for the research community github.com/lianghanfang/UnLiDAR-UAV-Est.
Multiple noncooperative targets encirclement by relative distance-based positioning and neural antisynchronization control
Nov 13, 2024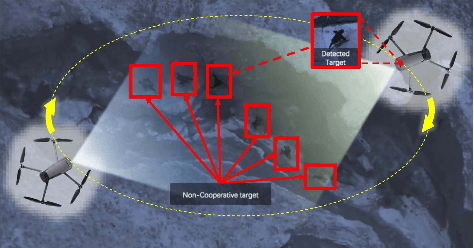
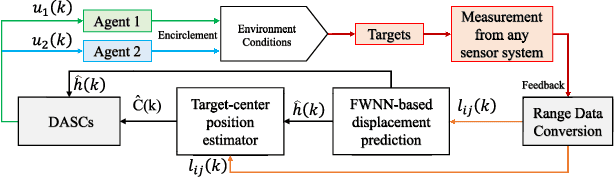
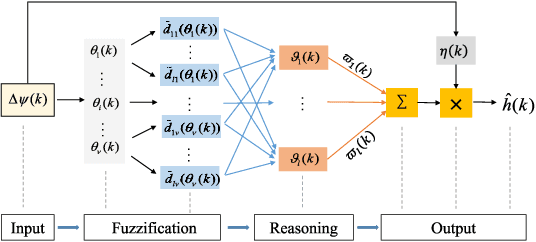
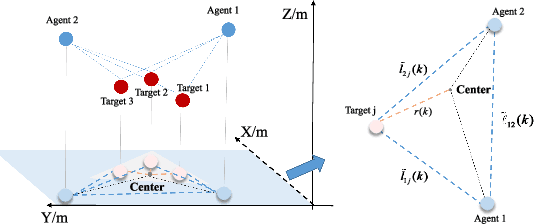
From prehistoric encirclement for hunting to GPS orbiting the earth for positioning, target encirclement has numerous real world applications. However, encircling multiple non-cooperative targets in GPS-denied environments remains challenging. In this work, multiple targets encirclement by using a minimum of two tasking agents, is considered where the relative distance measurements between the agents and the targets can be obtained by using onboard sensors. Based on the measurements, the center of all the targets is estimated directly by a fuzzy wavelet neural network (FWNN) and the least squares fit method. Then, a new distributed anti-synchronization controller (DASC) is designed so that the two tasking agents are able to encircle all targets while staying opposite to each other. In particular, the radius of the desired encirclement trajectory can be dynamically determined to avoid potential collisions between the two agents and all targets. Based on the Lyapunov stability analysis method, the convergence proofs of the neural network prediction error, the target-center position estimation error, and the controller error are addressed respectively. Finally, both numerical simulations and UAV flight experiments are conducted to demonstrate the validity of the encirclement algorithms. The flight tests recorded video and other simulation results can be found in https://youtu.be/B8uTorBNrl4.
Distance-based Multiple Non-cooperative Ground Target Encirclement for Complex Environments
Sep 24, 2024This paper proposes a comprehensive strategy for complex multi-target-multi-drone encirclement in an obstacle-rich and GPS-denied environment, motivated by practical scenarios such as pursuing vehicles or humans in urban canyons. The drones have omnidirectional range sensors that can robustly detect ground targets and obtain noisy relative distances. After each drone task is assigned, a novel distance-based target state estimator (DTSE) is proposed by estimating the measurement output noise variance and utilizing the Kalman filter. By integrating anti-synchronization techniques and pseudo-force functions, an acceleration controller enables two tasking drones to cooperatively encircle a target from opposing positions while navigating obstacles. The algorithms effectiveness for the discrete-time double-integrator system is established theoretically, particularly regarding observability. Moreover, the versatility of the algorithm is showcased in aerial-to-ground scenarios, supported by compelling simulation results. Experimental validation demonstrates the effectiveness of the proposed approach.