 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuralMUSIC: A Hybrid Neural-Subspace Framework for Robot Sound Source Localization
Jun 17, 2026Reliable sound source localization is fundamental to robot audition, enabling autonomous robots to perceive spatial cues and operate effectively in dynamic environments. Classical methods such as Multiple Signal Classification (MUSIC) offer strong theoretical foundations but degrade under low signal-to-noise ratios. While deep learning-based approaches achieve promising performance, they often struggle with limited generalization across conditions. To address these challenges, we propose NeuralMUSIC, a hybrid neural-subspace framework for robotic sound source localization. Specifically, a neural network first estimates the spatial covariance matrix from multichannel microphone observations. The predicted covariance is then integrated into a classical MUSIC pipeline with eigenvalue decomposition (EVD) and pseudo-spectrum computation, followed by a Frequency Attention Fusion (FAF) module to produce the final DOA estimates. To improve data efficiency, we further introduce a Self-supervised Spatial Correlation Learning (SSCL) strategy that leverages unlabeled acoustic data to capture spatial structure. Extensive experiments across different robotic tasks demonstrate that NeuralMUSIC achieves competitive localization accuracy while exhibiting improved robustness and cross-domain generalization.
A Deployable Embodied Vision-Language Navigation System with Hierarchical Cognition and Context-Aware Exploration
Apr 23, 2026Bridging the gap between embodied intelligence and embedded deployment remains a key challenge in intelligent robotic systems, where perception, reasoning, and planning must operate under strict constraints on computation, memory, energy, and real-time execution. In vision-language navigation (VLN), existing approaches often face a fundamental trade-off between strong reasoning capabilities and efficient deployment on real-world platforms. In this paper, we present a deployable embodied VLN system that achieves both high efficiency and robust high-level reasoning on real-world robotic platforms. To achieve this, we decouple the system into three asynchronous modules: a real-time perception module for continuous environment sensing, a memory integration module for spatial-semantic aggregation, and a reasoning module for high-level decision making. We incrementally construct a cognitive memory graph to encode scene information, which is further decomposed into subgraphs to enable reasoning with a vision-language model (VLM). To further improve navigation efficiency and accuracy, we also leverage the cognitive memory graph to formulate the exploration problem as a context-aware Weighted Traveling Repairman Problem (WTRP), which minimizes the weighted waiting time of viewpoints. Extensive experiments in both simulation and real-world robotic platforms demonstrate improved navigation success and efficiency over existing VLN approaches, while maintaining real-time performance on resource-constrained hardware.
M4Human: A Large-Scale Multimodal mmWave Radar Benchmark for Human Mesh Reconstruction
Dec 17, 2025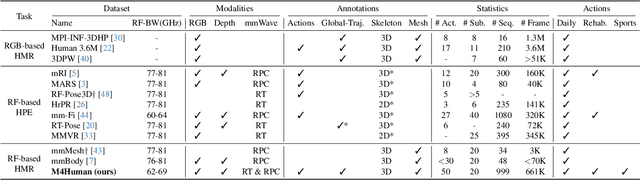
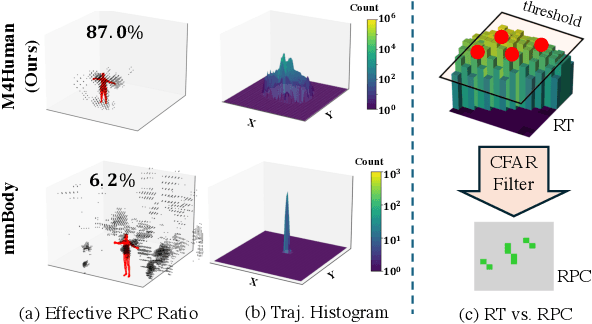

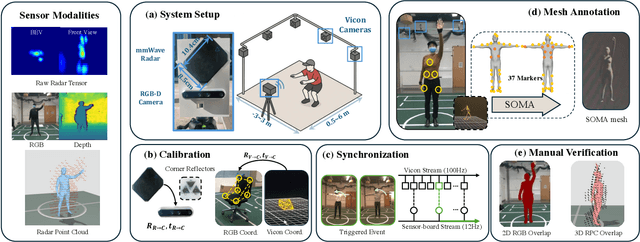
Human mesh reconstruction (HMR) provides direct insights into body-environment interaction, which enables various immersive applications. While existing large-scale HMR datasets rely heavily on line-of-sight RGB input, vision-based sensing is limited by occlusion, lighting variation, and privacy concerns. To overcome these limitations, recent efforts have explored radio-frequency (RF) mmWave radar for privacy-preserving indoor human sensing. However, current radar datasets are constrained by sparse skeleton labels, limited scale, and simple in-place actions. To advance the HMR research community, we introduce M4Human, the current largest-scale (661K-frame) ($9\times$ prior largest) multimodal benchmark, featuring high-resolution mmWave radar, RGB, and depth data. M4Human provides both raw radar tensors (RT) and processed radar point clouds (RPC) to enable research across different levels of RF signal granularity. M4Human includes high-quality motion capture (MoCap) annotations with 3D meshes and global trajectories, and spans 20 subjects and 50 diverse actions, including in-place, sit-in-place, and free-space sports or rehabilitation movements. We establish benchmarks on both RT and RPC modalities, as well as multimodal fusion with RGB-D modalities. Extensive results highlight the significance of M4Human for radar-based human modeling while revealing persistent challenges under fast, unconstrained motion. The dataset and code will be released after the paper publication.
Unsupervised Anomaly Detection for Autonomous Robots via Mahalanobis SVDD with Audio-IMU Fusion
May 09, 2025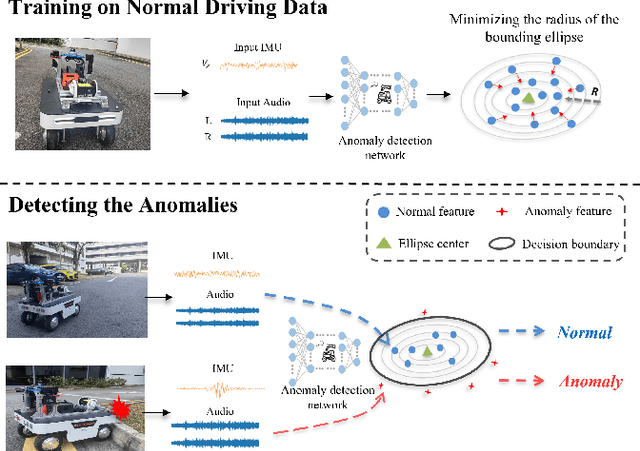
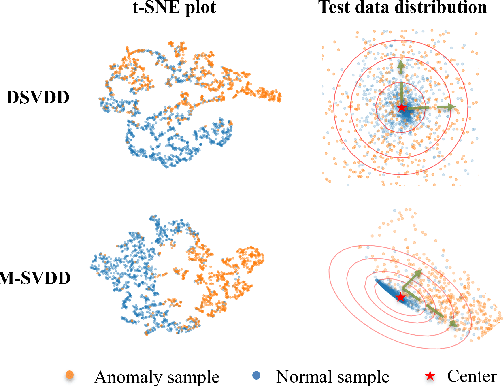
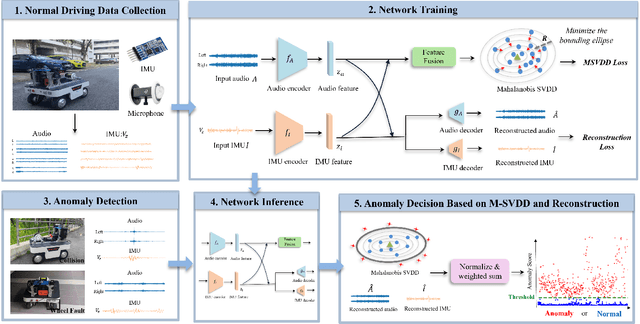
Reliable anomaly detection is essential for ensuring the safety of autonomous robots, particularly when conventional detection systems based on vision or LiDAR become unreliable in adverse or unpredictable conditions. In such scenarios, alternative sensing modalities are needed to provide timely and robust feedback. To this end, we explore the use of audio and inertial measurement unit (IMU) sensors to detect underlying anomalies in autonomous mobile robots, such as collisions and internal mechanical faults. Furthermore, to address the challenge of limited labeled anomaly data, we propose an unsupervised anomaly detection framework based on Mahalanobis Support Vector Data Description (M-SVDD). In contrast to conventional SVDD methods that rely on Euclidean distance and assume isotropic feature distributions, our approach employs the Mahalanobis distance to adaptively scale feature dimensions and capture inter-feature correlations, enabling more expressive decision boundaries. In addition, a reconstruction-based auxiliary branch is introduced to preserve feature diversity and prevent representation collapse, further enhancing the robustness of anomaly detection. Extensive experiments on a collected mobile robot dataset and four public datasets demonstrate the effectiveness of the proposed method, as shown in the video https://youtu.be/yh1tn6DDD4A. Code and dataset are available at https://github.com/jamesyang7/M-SVDD.
Following Is All You Need: Robot Crowd Navigation Using People As Planners
Apr 15, 2025Navigating in crowded environments requires the robot to be equipped with high-level reasoning and planning techniques. Existing works focus on developing complex and heavyweight planners while ignoring the role of human intelligence. Since humans are highly capable agents who are also widely available in a crowd navigation setting, we propose an alternative scheme where the robot utilises people as planners to benefit from their effective planning decisions and social behaviours. Through a set of rule-based evaluations, we identify suitable human leaders who exhibit the potential to guide the robot towards its goal. Using a simple base planner, the robot follows the selected leader through shorthorizon subgoals that are designed to be straightforward to achieve. We demonstrate through both simulated and real-world experiments that our novel framework generates safe and efficient robot plans compared to existing planners, even without predictive or data-driven modules. Our method also brings human-like robot behaviours without explicitly defining traffic rules and social norms. Code will be available at https://github.com/centiLinda/PeopleAsPlanner.git.
AV-DTEC: Self-Supervised Audio-Visual Fusion for Drone Trajectory Estimation and Classification
Dec 22, 2024



The increasing use of compact UAVs has created significant threats to public safety, while traditional drone detection systems are often bulky and costly. To address these challenges, we propose AV-DTEC, a lightweight self-supervised audio-visual fusion-based anti-UAV system. AV-DTEC is trained using self-supervised learning with labels generated by LiDAR, and it simultaneously learns audio and visual features through a parallel selective state-space model. With the learned features, a specially designed plug-and-play primary-auxiliary feature enhancement module integrates visual features into audio features for better robustness in cross-lighting conditions. To reduce reliance on auxiliary features and align modalities, we propose a teacher-student model that adaptively adjusts the weighting of visual features. AV-DTEC demonstrates exceptional accuracy and effectiveness in real-world multi-modality data. The code and trained models are publicly accessible on GitHub \url{https://github.com/AmazingDay1/AV-DETC}.
Unsupervised UAV 3D Trajectories Estimation with Sparse Point Clouds
Dec 17, 2024Compact UAV systems, while advancing delivery and surveillance, pose significant security challenges due to their small size, which hinders detection by traditional methods. This paper presents a cost-effective, unsupervised UAV detection method using spatial-temporal sequence processing to fuse multiple LiDAR scans for accurate UAV tracking in real-world scenarios. Our approach segments point clouds into foreground and background, analyzes spatial-temporal data, and employs a scoring mechanism to enhance detection accuracy. Tested on a public dataset, our solution placed 4th in the CVPR 2024 UG2+ Challenge, demonstrating its practical effectiveness. We plan to open-source all designs, code, and sample data for the research community github.com/lianghanfang/UnLiDAR-UAV-Est.
Learning Dynamic Weight Adjustment for Spatial-Temporal Trajectory Planning in Crowd Navigation
Nov 30, 2024



Robot navigation in dense human crowds poses a significant challenge due to the complexity of human behavior in dynamic and obstacle-rich environments. In this work, we propose a dynamic weight adjustment scheme using a neural network to predict the optimal weights of objectives in an optimization-based motion planner. We adopt a spatial-temporal trajectory planner and incorporate diverse objectives to achieve a balance among safety, efficiency, and goal achievement in complex and dynamic environments. We design the network structure, observation encoding, and reward function to effectively train the policy network using reinforcement learning, allowing the robot to adapt its behavior in real time based on environmental and pedestrian information. Simulation results show improved safety compared to the fixed-weight planner and the state-of-the-art learning-based methods, and verify the ability of the learned policy to adaptively adjust the weights based on the observed situations. The approach's feasibility is demonstrated in a navigation task using an autonomous delivery robot across a crowded corridor over a 300 m distance.
AV-PedAware: Self-Supervised Audio-Visual Fusion for Dynamic Pedestrian Awareness
Nov 11, 2024



In this study, we introduce AV-PedAware, a self-supervised audio-visual fusion system designed to improve dynamic pedestrian awareness for robotics applications. Pedestrian awareness is a critical requirement in many robotics applications. However, traditional approaches that rely on cameras and LIDARs to cover multiple views can be expensive and susceptible to issues such as changes in illumination, occlusion, and weather conditions. Our proposed solution replicates human perception for 3D pedestrian detection using low-cost audio and visual fusion. This study represents the first attempt to employ audio-visual fusion to monitor footstep sounds for the purpose of predicting the movements of pedestrians in the vicinity. The system is trained through self-supervised learning based on LIDAR-generated labels, making it a cost-effective alternative to LIDAR-based pedestrian awareness. AV-PedAware achieves comparable results to LIDAR-based systems at a fraction of the cost. By utilizing an attention mechanism, it can handle dynamic lighting and occlusions, overcoming the limitations of traditional LIDAR and camera-based systems. To evaluate our approach's effectiveness, we collected a new multimodal pedestrian detection dataset and conducted experiments that demonstrate the system's ability to provide reliable 3D detection results using only audio and visual data, even in extreme visual conditions. We will make our collected dataset and source code available online for the community to encourage further development in the field of robotics perception systems.
Robust Loop Closure by Textual Cues in Challenging Environments
Oct 21, 2024



Loop closure is an important task in robot navigation. However, existing methods mostly rely on some implicit or heuristic features of the environment, which can still fail to work in common environments such as corridors, tunnels, and warehouses. Indeed, navigating in such featureless, degenerative, and repetitive (FDR) environments would also pose a significant challenge even for humans, but explicit text cues in the surroundings often provide the best assistance. This inspires us to propose a multi-modal loop closure method based on explicit human-readable textual cues in FDR environments. Specifically, our approach first extracts scene text entities based on Optical Character Recognition (OCR), then creates a local map of text cues based on accurate LiDAR odometry and finally identifies loop closure events by a graph-theoretic scheme. Experiment results demonstrate that this approach has superior performance over existing methods that rely solely on visual and LiDAR sensors. To benefit the community, we release the source code and datasets at \url{https://github.com/TongxingJin/TXTLCD}.