 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContactGaussian-WM: Learning Physics-Grounded World Model from Videos
Feb 11, 2026Developing world models that understand complex physical interactions is essential for advancing robotic planning and simulation.However, existing methods often struggle to accurately model the environment under conditions of data scarcity and complex contact-rich dynamic motion.To address these challenges, we propose ContactGaussian-WM, a differentiable physics-grounded rigid-body world model capable of learning intricate physical laws directly from sparse and contact-rich video sequences.Our framework consists of two core components: (1) a unified Gaussian representation for both visual appearance and collision geometry, and (2) an end-to-end differentiable learning framework that differentiates through a closed-form physics engine to infer physical properties from sparse visual observations.Extensive simulations and real-world evaluations demonstrate that ContactGaussian-WM outperforms state-of-the-art methods in learning complex scenarios, exhibiting robust generalization capabilities.Furthermore, we showcase the practical utility of our framework in downstream applications, including data synthesis and real-time MPC.
NeRC: Neural Ranging Correction through Differentiable Moving Horizon Location Estimation
Aug 20, 2025GNSS localization using everyday mobile devices is challenging in urban environments, as ranging errors caused by the complex propagation of satellite signals and low-quality onboard GNSS hardware are blamed for undermining positioning accuracy. Researchers have pinned their hopes on data-driven methods to regress such ranging errors from raw measurements. However, the grueling annotation of ranging errors impedes their pace. This paper presents a robust end-to-end Neural Ranging Correction (NeRC) framework, where localization-related metrics serve as the task objective for training the neural modules. Instead of seeking impractical ranging error labels, we train the neural network using ground-truth locations that are relatively easy to obtain. This functionality is supported by differentiable moving horizon location estimation (MHE) that handles a horizon of measurements for positioning and backpropagates the gradients for training. Even better, as a blessing of end-to-end learning, we propose a new training paradigm using Euclidean Distance Field (EDF) cost maps, which alleviates the demands on labeled locations. We evaluate the proposed NeRC on public benchmarks and our collected datasets, demonstrating its distinguished improvement in positioning accuracy. We also deploy NeRC on the edge to verify its real-time performance for mobile devices.
Unsupervised Anomaly Detection for Autonomous Robots via Mahalanobis SVDD with Audio-IMU Fusion
May 09, 2025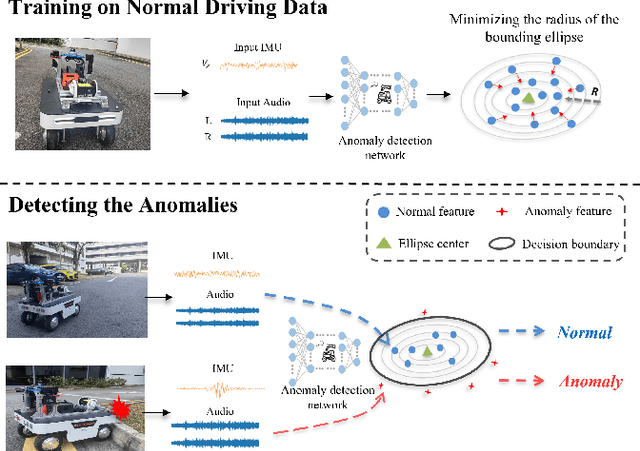
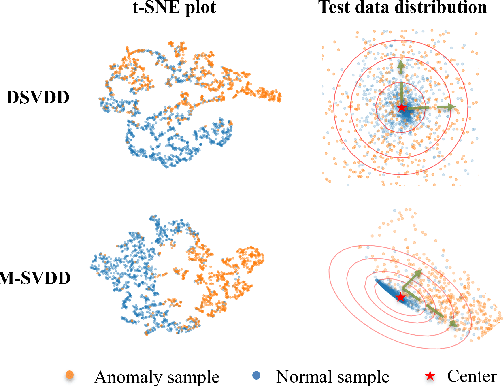
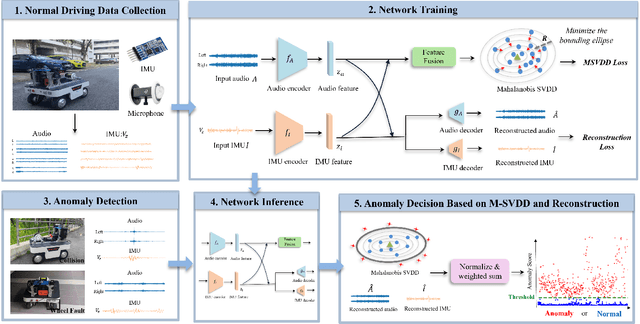
Reliable anomaly detection is essential for ensuring the safety of autonomous robots, particularly when conventional detection systems based on vision or LiDAR become unreliable in adverse or unpredictable conditions. In such scenarios, alternative sensing modalities are needed to provide timely and robust feedback. To this end, we explore the use of audio and inertial measurement unit (IMU) sensors to detect underlying anomalies in autonomous mobile robots, such as collisions and internal mechanical faults. Furthermore, to address the challenge of limited labeled anomaly data, we propose an unsupervised anomaly detection framework based on Mahalanobis Support Vector Data Description (M-SVDD). In contrast to conventional SVDD methods that rely on Euclidean distance and assume isotropic feature distributions, our approach employs the Mahalanobis distance to adaptively scale feature dimensions and capture inter-feature correlations, enabling more expressive decision boundaries. In addition, a reconstruction-based auxiliary branch is introduced to preserve feature diversity and prevent representation collapse, further enhancing the robustness of anomaly detection. Extensive experiments on a collected mobile robot dataset and four public datasets demonstrate the effectiveness of the proposed method, as shown in the video https://youtu.be/yh1tn6DDD4A. Code and dataset are available at https://github.com/jamesyang7/M-SVDD.
UA-MPC: Uncertainty-Aware Model Predictive Control for Motorized LiDAR Odometry
Dec 18, 2024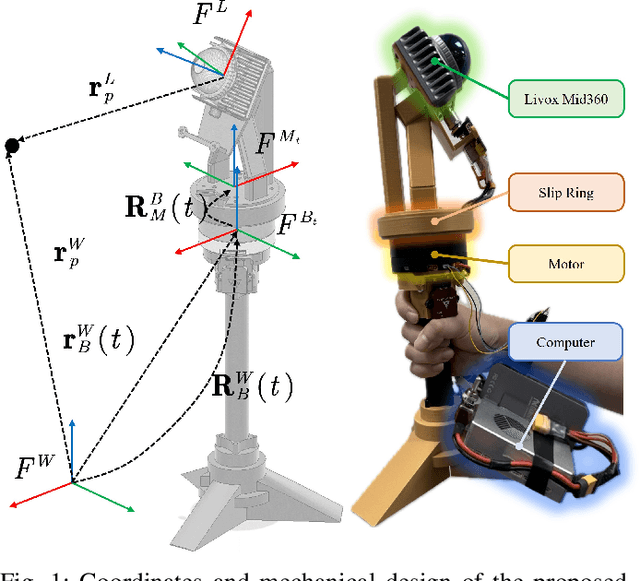


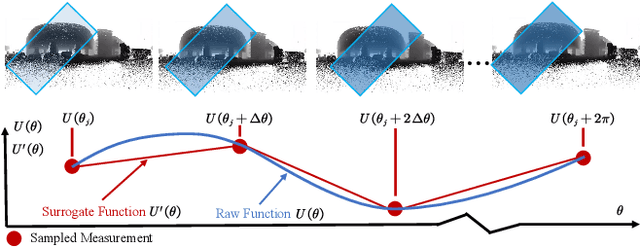
Accurate and comprehensive 3D sensing using LiDAR systems is crucial for various applications in photogrammetry and robotics, including facility inspection, Building Information Modeling (BIM), and robot navigation. Motorized LiDAR systems can expand the Field of View (FoV) without adding multiple scanners, but existing motorized LiDAR systems often rely on constant-speed motor control, leading to suboptimal performance in complex environments. To address this, we propose UA-MPC, an uncertainty-aware motor control strategy that balances scanning accuracy and efficiency. By predicting discrete observabilities of LiDAR Odometry (LO) through ray tracing and modeling their distribution with a surrogate function, UA-MPC efficiently optimizes motor speed control according to different scenes. Additionally, we develop a ROS-based realistic simulation environment for motorized LiDAR systems, enabling the evaluation of control strategies across diverse scenarios. Extensive experiments, conducted on both simulated and real-world scenarios, demonstrate that our method significantly improves odometry accuracy while preserving the scanning efficiency of motorized LiDAR systems. Specifically, it achieves over a 60\% reduction in positioning error with less than a 2\% decrease in efficiency compared to constant-speed control, offering a smarter and more effective solution for active 3D sensing tasks. The simulation environment for control motorized LiDAR is open-sourced at: \url{https://github.com/kafeiyin00/UA-MPC.git}.
Distance-based Multiple Non-cooperative Ground Target Encirclement for Complex Environments
Sep 24, 2024This paper proposes a comprehensive strategy for complex multi-target-multi-drone encirclement in an obstacle-rich and GPS-denied environment, motivated by practical scenarios such as pursuing vehicles or humans in urban canyons. The drones have omnidirectional range sensors that can robustly detect ground targets and obtain noisy relative distances. After each drone task is assigned, a novel distance-based target state estimator (DTSE) is proposed by estimating the measurement output noise variance and utilizing the Kalman filter. By integrating anti-synchronization techniques and pseudo-force functions, an acceleration controller enables two tasking drones to cooperatively encircle a target from opposing positions while navigating obstacles. The algorithms effectiveness for the discrete-time double-integrator system is established theoretically, particularly regarding observability. Moreover, the versatility of the algorithm is showcased in aerial-to-ground scenarios, supported by compelling simulation results. Experimental validation demonstrates the effectiveness of the proposed approach.
HelmetPoser: A Helmet-Mounted IMU Dataset for Data-Driven Estimation of Human Head Motion in Diverse Conditions
Sep 08, 2024Helmet-mounted wearable positioning systems are crucial for enhancing safety and facilitating coordination in industrial, construction, and emergency rescue environments. These systems, including LiDAR-Inertial Odometry (LIO) and Visual-Inertial Odometry (VIO), often face challenges in localization due to adverse environmental conditions such as dust, smoke, and limited visual features. To address these limitations, we propose a novel head-mounted Inertial Measurement Unit (IMU) dataset with ground truth, aimed at advancing data-driven IMU pose estimation. Our dataset captures human head motion patterns using a helmet-mounted system, with data from ten participants performing various activities. We explore the application of neural networks, specifically Long Short-Term Memory (LSTM) and Transformer networks, to correct IMU biases and improve localization accuracy. Additionally, we evaluate the performance of these methods across different IMU data window dimensions, motion patterns, and sensor types. We release a publicly available dataset, demonstrate the feasibility of advanced neural network approaches for helmet-based localization, and provide evaluation metrics to establish a baseline for future studies in this field. Data and code can be found at \url{https://lqiutong.github.io/HelmetPoser.github.io/}.
A Differential Dynamic Programming Framework for Inverse Reinforcement Learning
Jul 29, 2024A differential dynamic programming (DDP)-based framework for inverse reinforcement learning (IRL) is introduced to recover the parameters in the cost function, system dynamics, and constraints from demonstrations. Different from existing work, where DDP was used for the inner forward problem with inequality constraints, our proposed framework uses it for efficient computation of the gradient required in the outer inverse problem with equality and inequality constraints. The equivalence between the proposed method and existing methods based on Pontryagin's Maximum Principle (PMP) is established. More importantly, using this DDP-based IRL with an open-loop loss function, a closed-loop IRL framework is presented. In this framework, a loss function is proposed to capture the closed-loop nature of demonstrations. It is shown to be better than the commonly used open-loop loss function. We show that the closed-loop IRL framework reduces to a constrained inverse optimal control problem under certain assumptions. Under these assumptions and a rank condition, it is proven that the learning parameters can be recovered from the demonstration data. The proposed framework is extensively evaluated through four numerical robot examples and one real-world quadrotor system. The experiments validate the theoretical results and illustrate the practical relevance of the approach.
HCTO: Optimality-Aware LiDAR Inertial Odometry with Hybrid Continuous Time Optimization for Compact Wearable Mapping System
Mar 21, 2024Compact wearable mapping system (WMS) has gained significant attention due to their convenience in various applications. Specifically, it provides an efficient way to collect prior maps for 3D structure inspection and robot-based "last-mile delivery" in complex environments. However, vibrations in human motion and the uneven distribution of point cloud features in complex environments often lead to rapid drift, which is a prevalent issue when applying existing LiDAR Inertial Odometry (LIO) methods on low-cost WMS. To address these limitations, we propose a novel LIO for WMSs based on Hybrid Continuous Time Optimization (HCTO) considering the optimality of Lidar correspondences. First, HCTO recognizes patterns in human motion (high-frequency part, low-frequency part, and constant velocity part) by analyzing raw IMU measurements. Second, HCTO constructs hybrid IMU factors according to different motion states, which enables robust and accurate estimation against vibration-induced noise in the IMU measurements. Third, the best point correspondences are selected using optimal design to achieve real-time performance and better odometry accuracy. We conduct experiments on head-mounted WMS datasets to evaluate the performance of our system, demonstrating significant advantages over state-of-the-art methods. Video recordings of experiments can be found on the project page of HCTO: \href{https://github.com/kafeiyin00/HCTO}{https://github.com/kafeiyin00/HCTO}.
PST-Bench: Tracing and Benchmarking the Source of Publications
Feb 25, 2024



Tracing the source of research papers is a fundamental yet challenging task for researchers. The billion-scale citation relations between papers hinder researchers from understanding the evolution of science efficiently. To date, there is still a lack of an accurate and scalable dataset constructed by professional researchers to identify the direct source of their studied papers, based on which automatic algorithms can be developed to expand the evolutionary knowledge of science. In this paper, we study the problem of paper source tracing (PST) and construct a high-quality and ever-increasing dataset PST-Bench in computer science. Based on PST-Bench, we reveal several intriguing discoveries, such as the differing evolution patterns across various topics. An exploration of various methods underscores the hardness of PST-Bench, pinpointing potential directions on this topic. The dataset and codes have been available at https://github.com/THUDM/paper-source-trace.
OAG-Bench: A Human-Curated Benchmark for Academic Graph Mining
Feb 24, 2024



With the rapid proliferation of scientific literature, versatile academic knowledge services increasingly rely on comprehensive academic graph mining. Despite the availability of public academic graphs, benchmarks, and datasets, these resources often fall short in multi-aspect and fine-grained annotations, are constrained to specific task types and domains, or lack underlying real academic graphs. In this paper, we present OAG-Bench, a comprehensive, multi-aspect, and fine-grained human-curated benchmark based on the Open Academic Graph (OAG). OAG-Bench covers 10 tasks, 20 datasets, 70+ baselines, and 120+ experimental results to date. We propose new data annotation strategies for certain tasks and offer a suite of data pre-processing codes, algorithm implementations, and standardized evaluation protocols to facilitate academic graph mining. Extensive experiments reveal that even advanced algorithms like large language models (LLMs) encounter difficulties in addressing key challenges in certain tasks, such as paper source tracing and scholar profiling. We also introduce the Open Academic Graph Challenge (OAG-Challenge) to encourage community input and sharing. We envisage that OAG-Bench can serve as a common ground for the community to evaluate and compare algorithms in academic graph mining, thereby accelerating algorithm development and advancement in this field. OAG-Bench is accessible at https://www.aminer.cn/data/.