 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeP1-VL: Bridging Visual Perception and Scientific Reasoning in Physics Olympiads
Feb 10, 2026The transition from symbolic manipulation to science-grade reasoning represents a pivotal frontier for Large Language Models (LLMs), with physics serving as the critical test anchor for binding abstract logic to physical reality. Physics demands that a model maintain physical consistency with the laws governing the universe, a task that fundamentally requires multimodal perception to ground abstract logic in reality. At the Olympiad level, diagrams are often constitutive rather than illustrative, containing essential constraints, such as boundary conditions and spatial symmetries, that are absent from the text. To bridge this visual-logical gap, we introduce P1-VL, a family of open-source vision-language models engineered for advanced scientific reasoning. Our method harmonizes Curriculum Reinforcement Learning, which employs progressive difficulty expansion to stabilize post-training, with Agentic Augmentation, enabling iterative self-verification at inference. Evaluated on HiPhO, a rigorous benchmark of 13 exams from 2024-2025, our flagship P1-VL-235B-A22B becomes the first open-source Vision-Language Model (VLM) to secure 12 gold medals and achieves the state-of-the-art performance in the open-source models. Our agent-augmented system achieves the No.2 overall rank globally, trailing only Gemini-3-Pro. Beyond physics, P1-VL demonstrates remarkable scientific reasoning capacity and generalizability, establishing significant leads over base models in STEM benchmarks. By open-sourcing P1-VL, we provide a foundational step toward general-purpose physical intelligence to better align visual perceptions with abstract physical laws for machine scientific discovery.
A Unified Study of LoRA Variants: Taxonomy, Review, Codebase, and Empirical Evaluation
Jan 30, 2026Low-Rank Adaptation (LoRA) is a fundamental parameter-efficient fine-tuning method that balances efficiency and performance in large-scale neural networks. However, the proliferation of LoRA variants has led to fragmentation in methodology, theory, code, and evaluation. To this end, this work presents the first unified study of LoRA variants, offering a systematic taxonomy, unified theoretical review, structured codebase, and standardized empirical assessment. First, we categorize LoRA variants along four principal axes: rank, optimization dynamics, initialization, and integration with Mixture-of-Experts. Then, we review their relationships and evolution within a common theoretical framework focused on low-rank update dynamics. Further, we introduce LoRAFactory, a modular codebase that implements variants through a unified interface, supporting plug-and-play experimentation and fine-grained analysis. Last, using this codebase, we conduct a large-scale evaluation across natural language generation, natural language understanding, and image classification tasks, systematically exploring key hyperparameters. Our results uncover several findings, notably: LoRA and its variants exhibit pronounced sensitivity to the choices of learning rate compared to other hyperparameters; moreover, with proper hyperparameter configurations, LoRA consistently matches or surpasses the performance of most of its variants.
P1: Mastering Physics Olympiads with Reinforcement Learning
Nov 17, 2025Recent progress in large language models (LLMs) has moved the frontier from puzzle-solving to science-grade reasoning-the kind needed to tackle problems whose answers must stand against nature, not merely fit a rubric. Physics is the sharpest test of this shift, which binds symbols to reality in a fundamental way, serving as the cornerstone of most modern technologies. In this work, we manage to advance physics research by developing large language models with exceptional physics reasoning capabilities, especially excel at solving Olympiad-level physics problems. We introduce P1, a family of open-source physics reasoning models trained entirely through reinforcement learning (RL). Among them, P1-235B-A22B is the first open-source model with Gold-medal performance at the latest International Physics Olympiad (IPhO 2025), and wins 12 gold medals out of 13 international/regional physics competitions in 2024/2025. P1-30B-A3B also surpasses almost all other open-source models on IPhO 2025, getting a silver medal. Further equipped with an agentic framework PhysicsMinions, P1-235B-A22B+PhysicsMinions achieves overall No.1 on IPhO 2025, and obtains the highest average score over the 13 physics competitions. Besides physics, P1 models also present great performance on other reasoning tasks like math and coding, showing the great generalibility of P1 series.
MagicHOI: Leveraging 3D Priors for Accurate Hand-object Reconstruction from Short Monocular Video Clips
Aug 07, 2025



Most RGB-based hand-object reconstruction methods rely on object templates, while template-free methods typically assume full object visibility. This assumption often breaks in real-world settings, where fixed camera viewpoints and static grips leave parts of the object unobserved, resulting in implausible reconstructions. To overcome this, we present MagicHOI, a method for reconstructing hands and objects from short monocular interaction videos, even under limited viewpoint variation. Our key insight is that, despite the scarcity of paired 3D hand-object data, large-scale novel view synthesis diffusion models offer rich object supervision. This supervision serves as a prior to regularize unseen object regions during hand interactions. Leveraging this insight, we integrate a novel view synthesis model into our hand-object reconstruction framework. We further align hand to object by incorporating visible contact constraints. Our results demonstrate that MagicHOI significantly outperforms existing state-of-the-art hand-object reconstruction methods. We also show that novel view synthesis diffusion priors effectively regularize unseen object regions, enhancing 3D hand-object reconstruction.
Imperative MPC: An End-to-End Self-Supervised Learning with Differentiable MPC for UAV Attitude Control
Apr 17, 2025



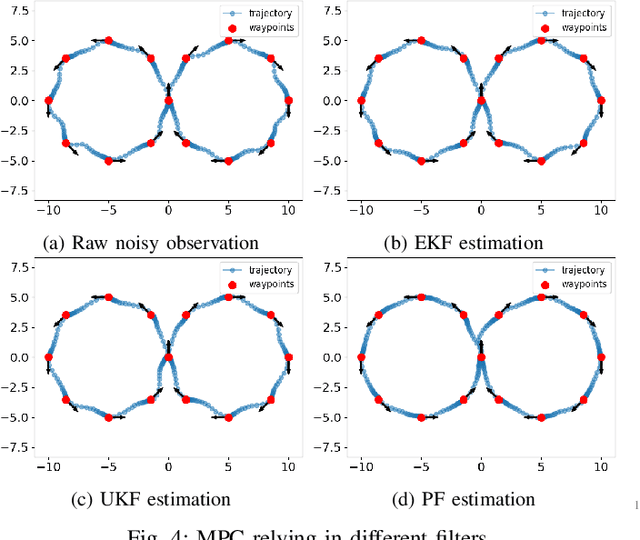
Modeling and control of nonlinear dynamics are critical in robotics, especially in scenarios with unpredictable external influences and complex dynamics. Traditional cascaded modular control pipelines often yield suboptimal performance due to conservative assumptions and tedious parameter tuning. Pure data-driven approaches promise robust performance but suffer from low sample efficiency, sim-to-real gaps, and reliance on extensive datasets. Hybrid methods combining learning-based and traditional model-based control in an end-to-end manner offer a promising alternative. This work presents a self-supervised learning framework combining learning-based inertial odometry (IO) module and differentiable model predictive control (d-MPC) for Unmanned Aerial Vehicle (UAV) attitude control. The IO denoises raw IMU measurements and predicts UAV attitudes, which are then optimized by MPC for control actions in a bi-level optimization (BLO) setup, where the inner MPC optimizes control actions and the upper level minimizes discrepancy between real-world and predicted performance. The framework is thus end-to-end and can be trained in a self-supervised manner. This approach combines the strength of learning-based perception with the interpretable model-based control. Results show the effectiveness even under strong wind. It can simultaneously enhance both the MPC parameter learning and IMU prediction performance.
Biology Instructions: A Dataset and Benchmark for Multi-Omics Sequence Understanding Capability of Large Language Models
Dec 26, 2024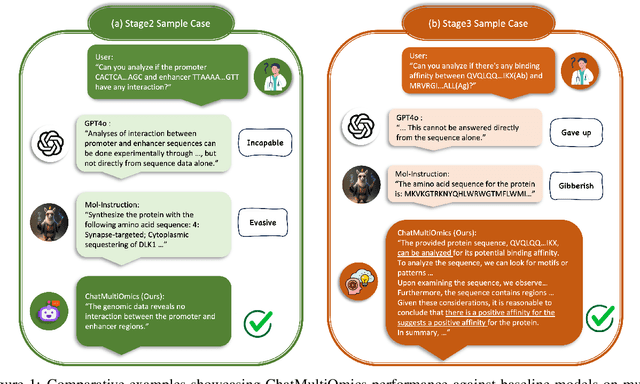
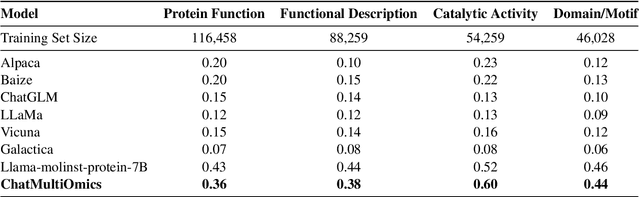
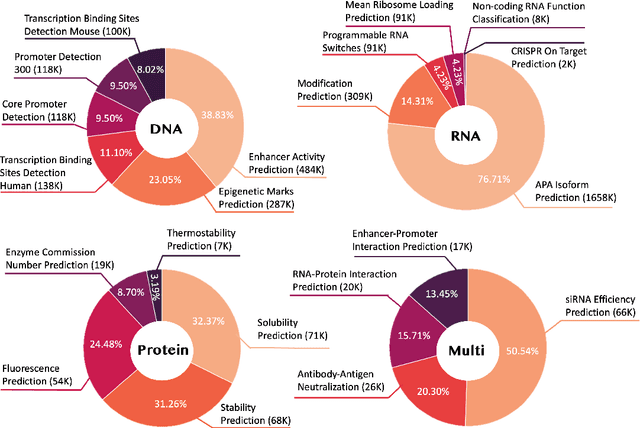
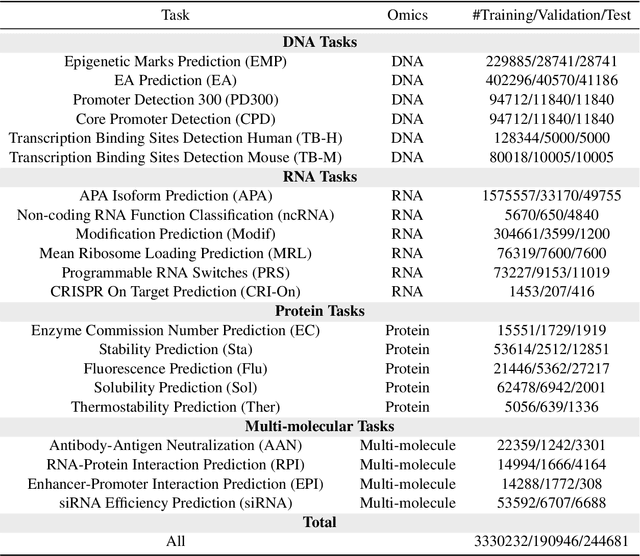
Large language models have already demonstrated their formidable capabilities in general domains, ushering in a revolutionary transformation. However, exploring and exploiting the extensive knowledge of these models to comprehend multi-omics biology remains underexplored. To fill this research gap, we first introduce Biology-Instructions, the first large-scale multi-omics biological sequences-related instruction-tuning dataset including DNA, RNA, proteins, and multi-molecules, designed to bridge the gap between large language models (LLMs) and complex biological sequences-related tasks. This dataset can enhance the versatility of LLMs by integrating diverse biological sequenced-based prediction tasks with advanced reasoning capabilities, while maintaining conversational fluency. Additionally, we reveal significant performance limitations in even state-of-the-art LLMs on biological sequence-related multi-omics tasks without specialized pre-training and instruction-tuning. We further develop a strong baseline called ChatMultiOmics with a novel three-stage training pipeline, demonstrating the powerful ability to understand biology by using Biology-Instructions. Biology-Instructions and ChatMultiOmics are publicly available and crucial resources for enabling more effective integration of LLMs with multi-omics sequence analysis.
iKap: Kinematics-aware Planning with Imperative Learning
Dec 12, 2024
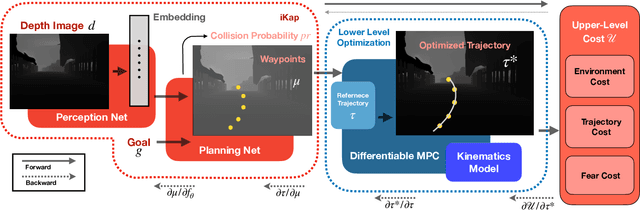


Trajectory planning in robotics aims to generate collision-free pose sequences that can be reliably executed. Recently, vision-to-planning systems have garnered increasing attention for their efficiency and ability to interpret and adapt to surrounding environments. However, traditional modular systems suffer from increased latency and error propagation, while purely data-driven approaches often overlook the robot's kinematic constraints. This oversight leads to discrepancies between planned trajectories and those that are executable. To address these challenges, we propose iKap, a novel vision-to-planning system that integrates the robot's kinematic model directly into the learning pipeline. iKap employs a self-supervised learning approach and incorporates the state transition model within a differentiable bi-level optimization framework. This integration ensures the network learns collision-free waypoints while satisfying kinematic constraints, enabling gradient back-propagation for end-to-end training. Our experimental results demonstrate that iKap achieves higher success rates and reduced latency compared to the state-of-the-art methods. Besides the complete system, iKap offers a visual-to-planning network that seamlessly integrates kinematics into various controllers, providing a robust solution for robots navigating complex and dynamic environments.
Imperative Learning: A Self-supervised Neural-Symbolic Learning Framework for Robot Autonomy
Jun 23, 2024



Data-driven methods such as reinforcement and imitation learning have achieved remarkable success in robot autonomy. However, their data-centric nature still hinders them from generalizing well to ever-changing environments. Moreover, collecting large datasets for robotic tasks is often impractical and expensive. To overcome these challenges, we introduce a new self-supervised neural-symbolic (NeSy) computational framework, imperative learning (IL), for robot autonomy, leveraging the generalization abilities of symbolic reasoning. The framework of IL consists of three primary components: a neural module, a reasoning engine, and a memory system. We formulate IL as a special bilevel optimization (BLO), which enables reciprocal learning over the three modules. This overcomes the label-intensive obstacles associated with data-driven approaches and takes advantage of symbolic reasoning concerning logical reasoning, physical principles, geometric analysis, etc. We discuss several optimization techniques for IL and verify their effectiveness in five distinct robot autonomy tasks including path planning, rule induction, optimal control, visual odometry, and multi-robot routing. Through various experiments, we show that IL can significantly enhance robot autonomy capabilities and we anticipate that it will catalyze further research across diverse domains.
PyPose v0.6: The Imperative Programming Interface for Robotics
Sep 22, 2023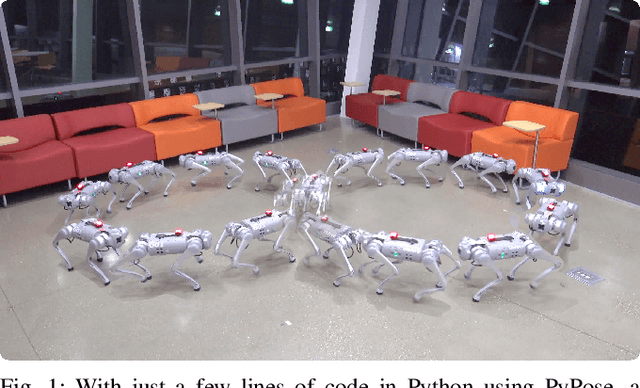
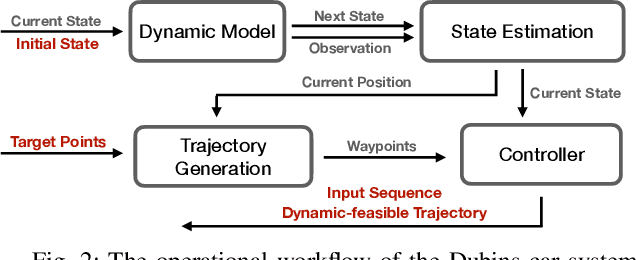
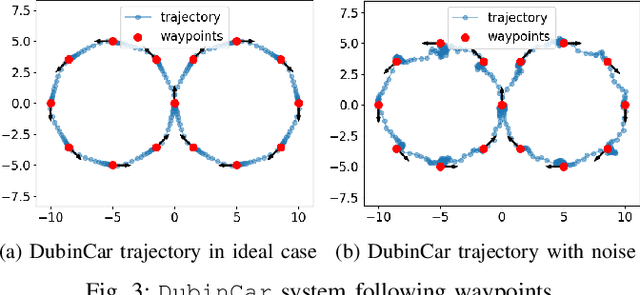
PyPose is an open-source library for robot learning. It combines a learning-based approach with physics-based optimization, which enables seamless end-to-end robot learning. It has been used in many tasks due to its meticulously designed application programming interface (API) and efficient implementation. From its initial launch in early 2022, PyPose has experienced significant enhancements, incorporating a wide variety of new features into its platform. To satisfy the growing demand for understanding and utilizing the library and reduce the learning curve of new users, we present the fundamental design principle of the imperative programming interface, and showcase the flexible usage of diverse functionalities and modules using an extremely simple Dubins car example. We also demonstrate that the PyPose can be easily used to navigate a real quadruped robot with a few lines of code.
SuperCLUE: A Comprehensive Chinese Large Language Model Benchmark
Jul 27, 2023Large language models (LLMs) have shown the potential to be integrated into human daily lives. Therefore, user preference is the most critical criterion for assessing LLMs' performance in real-world scenarios. However, existing benchmarks mainly focus on measuring models' accuracy using multi-choice questions, which limits the understanding of their capabilities in real applications. We fill this gap by proposing a comprehensive Chinese benchmark SuperCLUE, named after another popular Chinese LLM benchmark CLUE. SuperCLUE encompasses three sub-tasks: actual users' queries and ratings derived from an LLM battle platform (CArena), open-ended questions with single and multiple-turn dialogues (OPEN), and closed-ended questions with the same stems as open-ended single-turn ones (CLOSE). Our study shows that accuracy on closed-ended questions is insufficient to reflect human preferences achieved on open-ended ones. At the same time, they can complement each other to predict actual user preferences. We also demonstrate that GPT-4 is a reliable judge to automatically evaluate human preferences on open-ended questions in a Chinese context. Our benchmark will be released at https://www.CLUEbenchmarks.com