 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-subject Muscle Fatigue Detection via Adversarial and Supervised Contrastive Learning with Inception-Attention Network
Apr 03, 2026Muscle fatigue detection plays an important role in physical rehabilitation. Previous researches have demonstrated that sEMG offers superior sensitivity in detecting muscle fatigue compared to other biological signals. However, features extracted from sEMG may vary during dynamic contractions and across different subjects, which causes unstability in fatigue detection. To address these challenges, this research proposes a novel neural network comprising an Inception-attention module as a feature extractor, a fatigue classifier and a domain classifier equipped with a gradient reversal layer. The integrated domain classifier encourages the network to learn subject-invariant common fatigue features while minimizing subject-specific features. Furthermore, a supervised contrastive loss function is also employed to enhance the generalization capability of the model. Experimental results demonstrate that the proposed model achieved outstanding performance in three-class classification tasks, reaching 93.54% accuracy, 92.69% recall and 92.69% F1-score, providing a robust solution for cross-subject muscle fatigue detection, offering significant guidance for rehabilitation training and assistance.
ComBench: A Repo-level Real-world Benchmark for Compilation Error Repair
Mar 28, 2026Compilation errors pose pervasive and critical challenges in software development, significantly hindering productivity. Therefore, Automated Compilation Error Repair (ACER) techniques are proposed to mitigate these issues. Despite recent advancements in ACER, its real-world performance remains poorly evaluated. This can be largely attributed to the limitations of existing benchmarks, \ie decontextualized single-file data, lack of authentic source diversity, and biased local task modeling that ignores crucial repository-level complexities. To bridge this critical gap, we propose ComBench, the first repository-level, reproducible real-world benchmark for C/C++ compilation error repair. ComBench is constructed through a novel, automated framework that systematically mines real-world failures from the GitHub CI histories of large-scale open-source projects. Our framework contributes techniques for the high-precision identification of ground-truth repair patches from complex version histories and a high-fidelity mechanism for reproducing the original, ephemeral build environments. To ensure data quality, all samples in ComBench are execution-verified -- guaranteeing reproducible failures and build success with ground-truth patches. Using ComBench, we conduct a comprehensive evaluation of 12 modern LLMs under both direct and agent-based repair settings. Our experiments reveal a significant gap between a model's ability to achieve syntactic correctness (a 73% success rate for GPT-5) and its ability to ensure semantic correctness (only 41% of its patches are valid). We also find that different models exhibit distinct specializations for different error types. ComBench provides a robust and realistic platform to guide the future development of ACER techniques capable of addressing the complexities of modern software development.
Wukong-Omni: Design, Modeling and Control of a Multi-mode Robot for Air, Land, and Underwater Exploration with All-in-One Propulsion Unit
Mar 03, 2026In flood disaster rescue scenarios, partially submerged buildings prevent aerial robots from accessing lower levels, limiting mission effectiveness. To address this challenge, this paper presents Wukong-Omni, a novel multimode robot capable of operating across land, air, and underwater using a unified propulsion system. The system is enabled by an innovative mechanical design that allows motor reuse and improves thrust generation. Efficiency and peak thrust are enhanced through simulation and tank-based optimization. Experimental results show a 100 percent improvement in propulsion efficiency and a 150 percent increase in maximum thrust compared with direct installation methods. Dynamic models for the three operating domains are developed, and a unified cross-domain control framework is proposed. Comprehensive experiments validate stable locomotion and smooth transition across domains. Outdoor experiments further demonstrate robustness and adaptability in real-world environments.
Computable Gap Assessment of Artificial Intelligence Governance in Children's Centres:Evidence-Mechanism-Governance-Indicator Modelling of UNICEF's Guidance on AI and Children 3.0 Based on the Graph-GAP Framework
Dec 20, 2025This paper tackles practical challenges in governing child centered artificial intelligence: policy texts state principles and requirements but often lack reproducible evidence anchors, explicit causal pathways, executable governance toolchains, and computable audit metrics. We propose Graph-GAP, a methodology that decomposes requirements from authoritative policy texts into a four layer graph of evidence, mechanism, governance, and indicator, and that computes two metrics, GAP score and mitigation readiness, to identify governance gaps and prioritise actions. Using the UNICEF Innocenti Guidance on AI and Children 3.0 as primary material, we define reproducible extraction units, coding manuals, graph patterns, scoring scales, and consistency checks, and we demonstrate exemplar gap profiles and governance priority matrices for ten requirements. Results suggest that compared with privacy and data protection, requirements related to child well being and development, explainability and accountability, and cross agency implementation and resource allocation are more prone to indicator gaps and mechanism gaps. We recommend translating requirements into auditable closed loop governance that integrates child rights impact assessments, continuous monitoring metrics, and grievance redress procedures. At the coding level, we introduce a multi algorithm review aggregation revision workflow that runs rule based encoders, statistical or machine learning evaluators, and large model evaluators with diverse prompt configurations as parallel coders. Each extraction unit outputs evidence, mechanism, governance, and indicator labels plus readiness scores with evidence anchors. Reliability, stability, and uncertainty are assessed using Krippendorff alpha, weighted kappa, intraclass correlation, and bootstrap confidence intervals.
Improving Low-Latency Learning Performance in Spiking Neural Networks via a Change-Perceptive Dendrite-Soma-Axon Neuron
Dec 18, 2025Spiking neurons, the fundamental information processing units of Spiking Neural Networks (SNNs), have the all-or-zero information output form that allows SNNs to be more energy-efficient compared to Artificial Neural Networks (ANNs). However, the hard reset mechanism employed in spiking neurons leads to information degradation due to its uniform handling of diverse membrane potentials. Furthermore, the utilization of overly simplified neuron models that disregard the intricate biological structures inherently impedes the network's capacity to accurately simulate the actual potential transmission process. To address these issues, we propose a dendrite-soma-axon (DSA) neuron employing the soft reset strategy, in conjunction with a potential change-based perception mechanism, culminating in the change-perceptive dendrite-soma-axon (CP-DSA) neuron. Our model contains multiple learnable parameters that expand the representation space of neurons. The change-perceptive (CP) mechanism enables our model to achieve competitive performance in short time steps utilizing the difference information of adjacent time steps. Rigorous theoretical analysis is provided to demonstrate the efficacy of the CP-DSA model and the functional characteristics of its internal parameters. Furthermore, extensive experiments conducted on various datasets substantiate the significant advantages of the CP-DSA model over state-of-the-art approaches.
Aerial Target Encirclement and Interception with Noisy Range Observations
Aug 11, 2025This paper proposes a strategy to encircle and intercept a non-cooperative aerial point-mass moving target by leveraging noisy range measurements for state estimation. In this approach, the guardians actively ensure the observability of the target by using an anti-synchronization (AS), 3D ``vibrating string" trajectory, which enables rapid position and velocity estimation based on the Kalman filter. Additionally, a novel anti-target controller is designed for the guardians to enable adaptive transitions from encircling a protected target to encircling, intercepting, and neutralizing a hostile target, taking into consideration the input constraints of the guardians. Based on the guaranteed uniform observability, the exponentially bounded stability of the state estimation error and the convergence of the encirclement error are rigorously analyzed. Simulation results and real-world UAV experiments are presented to further validate the effectiveness of the system design.
AR-LIF: Adaptive reset leaky-integrate and fire neuron for spiking neural networks
Jul 28, 2025Spiking neural networks possess the advantage of low energy consumption due to their event-driven nature. Compared with binary spike outputs, their inherent floating-point dynamics are more worthy of attention. The threshold level and reset mode of neurons play a crucial role in determining the number and timing of spikes. The existing hard reset method causes information loss, while the improved soft reset method adopts a uniform treatment for neurons. In response to this, this paper designs an adaptive reset neuron, establishing the correlation between input, output and reset, and integrating a simple yet effective threshold adjustment strategy. It achieves excellent performance on various datasets while maintaining the advantage of low energy consumption.
WSCIF: A Weakly-Supervised Color Intelligence Framework for Tactical Anomaly Detection in Surveillance Keyframes
May 14, 2025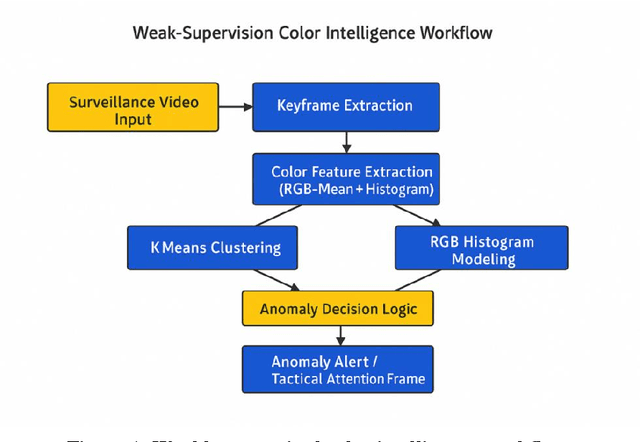

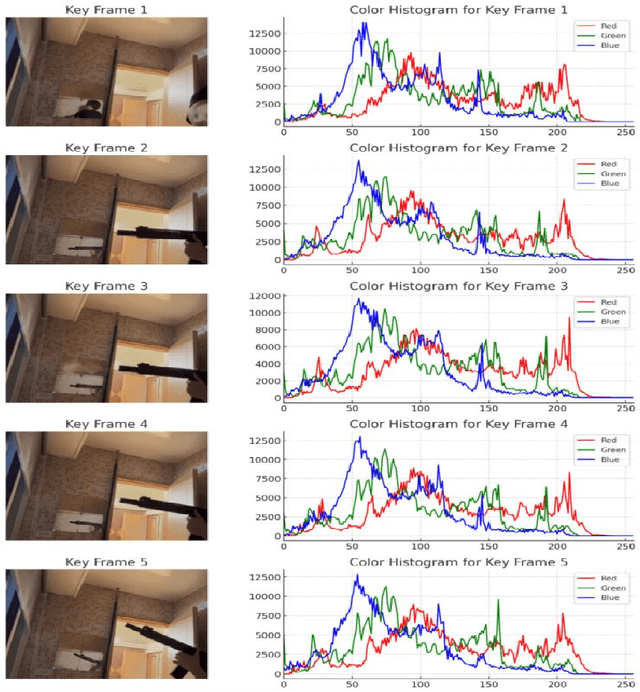
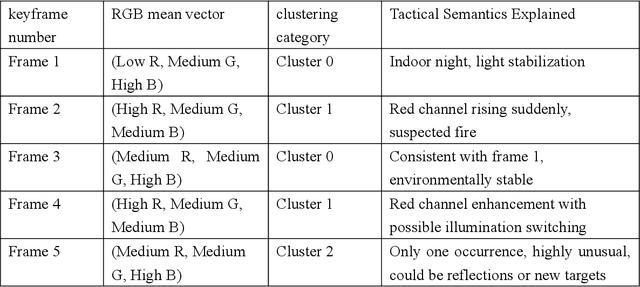
The deployment of traditional deep learning models in high-risk security tasks in an unlabeled, data-non-exploitable video intelligence environment faces significant challenges. In this paper, we propose a lightweight anomaly detection framework based on color features for surveillance video clips in a high sensitivity tactical mission, aiming to quickly identify and interpret potential threat events under resource-constrained and data-sensitive conditions. The method fuses unsupervised KMeans clustering with RGB channel histogram modeling to achieve composite detection of structural anomalies and color mutation signals in key frames. The experiment takes an operation surveillance video occurring in an African country as a research sample, and successfully identifies multiple highly anomalous frames related to high-energy light sources, target presence, and reflective interference under the condition of no access to the original data. The results show that this method can be effectively used for tactical assassination warning, suspicious object screening and environmental drastic change monitoring with strong deployability and tactical interpretation value. The study emphasizes the importance of color features as low semantic battlefield signal carriers, and its battlefield intelligent perception capability will be further extended by combining graph neural networks and temporal modeling in the future.
A study on audio synchronous steganography detection and distributed guide inference model based on sliding spectral features and intelligent inference drive
May 06, 2025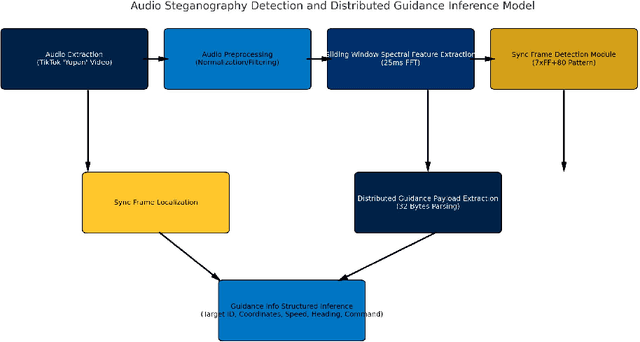
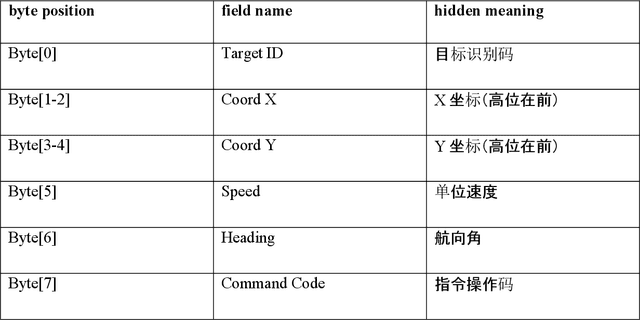
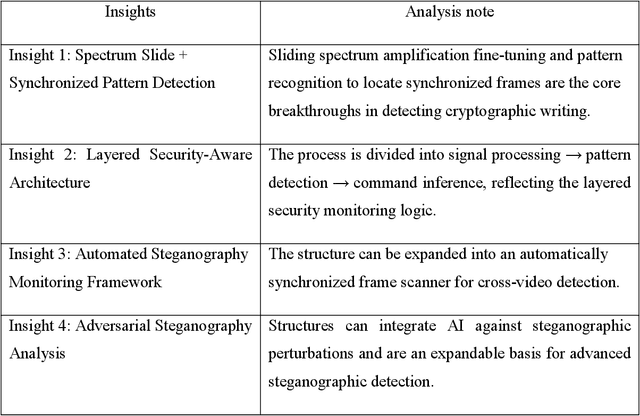
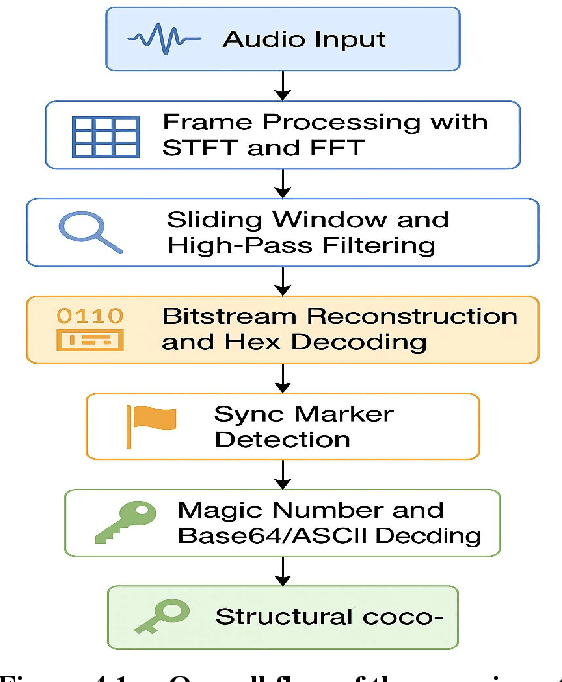
With the rise of short video platforms in global communication, embedding steganographic data in audio synchronization streams has emerged as a new covert communication method. To address the limitations of traditional techniques in detecting synchronized steganography, this paper proposes a detection and distributed guidance reconstruction model based on short video "Yupan" samples released by China's South Sea Fleet on TikTok. The method integrates sliding spectrum feature extraction and intelligent inference mechanisms. A 25 ms sliding window with short-time Fourier transform (STFT) is used to extract the main frequency trajectory and construct the synchronization frame detection model (M1), identifying a frame flag "FFFFFFFFFFFFFFFFFF80". The subsequent 32-byte payload is decoded by a structured model (M2) to infer distributed guidance commands. Analysis reveals a low-entropy, repetitive byte sequence in the 36 to 45 second audio segment with highly concentrated spectral energy, confirming the presence of synchronization frames. Although plaintext semantics are not restored, the consistency in command field layout suggests features of military communication protocols. The multi-segment splicing model further shows cross-video embedding and centralized decoding capabilities. The proposed framework validates the effectiveness of sliding spectral features for synchronized steganography detection and builds an extensible inference model for covert communication analysis and tactical guidance simulation on open platforms.
Modeling supply chain compliance response strategies based on AI synthetic data with structural path regression: A Simulation Study of EU 2027 Mandatory Labor Regulations
May 04, 2025In the context of the new mandatory labor compliance in the European Union (EU), which will be implemented in 2027, supply chain enterprises face stringent working hour management requirements and compliance risks. In order to scientifically predict the enterprises' coping behaviors and performance outcomes under the policy impact, this paper constructs a methodological framework that integrates the AI synthetic data generation mechanism and structural path regression modeling to simulate the enterprises' strategic transition paths under the new regulations. In terms of research methodology, this paper adopts high-quality simulation data generated based on Monte Carlo mechanism and NIST synthetic data standards to construct a structural path analysis model that includes multiple linear regression, logistic regression, mediation effect and moderating effect. The variable system covers 14 indicators such as enterprise working hours, compliance investment, response speed, automation level, policy dependence, etc. The variable set with explanatory power is screened out through exploratory data analysis (EDA) and VIF multicollinearity elimination. The findings show that compliance investment has a significant positive impact on firm survival and its effect is transmitted through the mediating path of the level of intelligence; meanwhile, firms' dependence on the EU market significantly moderates the strength of this mediating effect. It is concluded that AI synthetic data combined with structural path modeling provides an effective tool for high-intensity regulatory simulation, which can provide a quantitative basis for corporate strategic response, policy design and AI-assisted decision-making in the pre-prediction stage lacking real scenario data. Keywords: AI synthetic data, structural path regression modeling, compliance response strategy, EU 2027 mandatory labor regulation