 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple noncooperative targets encirclement by relative distance-based positioning and neural antisynchronization control
Paper and Code
Nov 13, 2024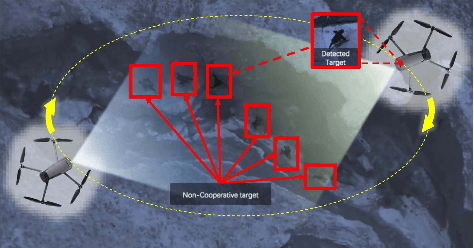
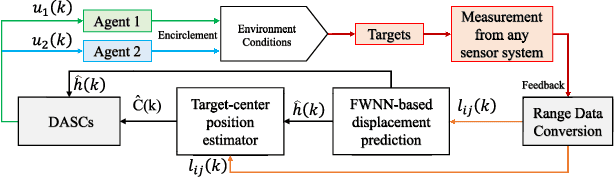
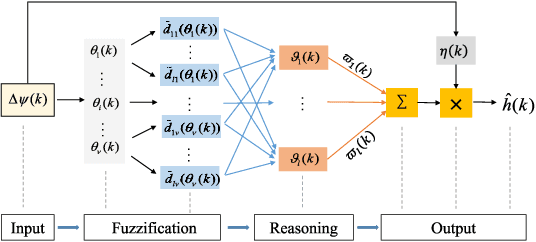
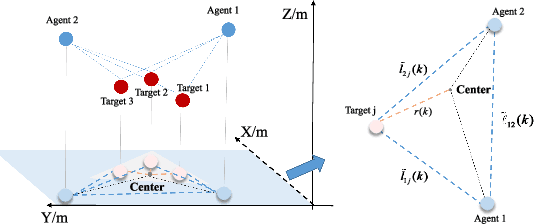
From prehistoric encirclement for hunting to GPS orbiting the earth for positioning, target encirclement has numerous real world applications. However, encircling multiple non-cooperative targets in GPS-denied environments remains challenging. In this work, multiple targets encirclement by using a minimum of two tasking agents, is considered where the relative distance measurements between the agents and the targets can be obtained by using onboard sensors. Based on the measurements, the center of all the targets is estimated directly by a fuzzy wavelet neural network (FWNN) and the least squares fit method. Then, a new distributed anti-synchronization controller (DASC) is designed so that the two tasking agents are able to encircle all targets while staying opposite to each other. In particular, the radius of the desired encirclement trajectory can be dynamically determined to avoid potential collisions between the two agents and all targets. Based on the Lyapunov stability analysis method, the convergence proofs of the neural network prediction error, the target-center position estimation error, and the controller error are addressed respectively. Finally, both numerical simulations and UAV flight experiments are conducted to demonstrate the validity of the encirclement algorithms. The flight tests recorded video and other simulation results can be found in https://youtu.be/B8uTorBNrl4.