 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots as Tokens: Unified Diffusion Transformer for Coordinated Multi-Robot Trajectory Generation
Jun 14, 2026The success of generative models in language and visual generation has inspired extensive applications to generative robot planning. However, most existing works either focus on single-robot planning, or generate multi-robot trajectories in a sequential manner with iterative post-processing to resolve inter-robot conflicts. In this work, we investigate whether coordinated multi-robot trajectories, as a special spatiotemporal distribution, can be learned and generated with a generative model in a feed-forward manner. We propose Robots as Tokens (Roken), a unified diffusion transformer that directly generates multi-robot trajectories that satisfy both (individual) safety and (global) connectivity constraints. The core design of Roken is to represent each robot as a discrete token, allowing them to naturally interact with each other through self-attention, and cross-attend to map tokens for environment layouts. We further introduce several auxiliary tasks based on Bayes' theorem to provide multi-scale spatial-temporal supervision for efficient learning of the conditional distribution. In training, Roken absorbs diverse expert trajectories from different team sizes. During inference, Roken behaves as a versatile multi-robot planner that can handle single-robot planning, coordinated multi-robot trajectory generation, and conditional trajectory generation by fixing some robot tokens as conditions. Experiments in diverse cluttered environments show that Roken can generate coordinated multi-robot trajectories to perform connectivity-constrained goal navigation tasks with high success rates, outperforming the baseline method used to generate the training dataset. Roken also demonstrates good scalability after training with mixed team sizes, and shows generalization to unseen or partially observed environments, verifying its potential to learn from diverse data and perform versatile tasks.
IntentNav: Learning Spatial-Visual Object Navigation from Human Demonstrations
Jun 06, 2026Object navigation requires a robot to search for an unobserved target in an unknown environment by deciding where to explore next under partial observability. Effective search resembles human-like exploration: selectively probing visually promising frontiers while relying on spatial memory to avoid redundant revisits. We propose IntentNav, a spatial-visual imitation framework that learns human-like ObjectNav policies from human demonstrations. To infer high-level search intent from low-level human actions, we introduce Frontier-based Human-Intent Labeling, which looks ahead in human demonstrations and labels the frontier that best explains the demonstrator's future search direction. We construct a spatial-visual candidate space, where BEV memory tracks explored regions, unexplored frontiers, and trajectory history, while egocentric visual memory provides semantic cues for each candidate. A VLM policy is trained to select among these grounded candidates, using Intent-Aligned Objective to encourage consistent and human-like exploration. IntentNav achieves state-of-the-art performance on the MP3D, HM3D-v1 and HM3D-v2 ObjectNav benchmarks. The proposed candidate-level navigation interface transfers zero-shot to wheeled, quadruped, and humanoid robots without further VLM fine-tuning. \href{https://anonymous.4open.science/w/IntentNav/}{Project page}.
Line-of-Sight-Constrained Multi-Robot Mapless Navigation via Polygonal Visible Regions
Mar 27, 2026Multi-robot systems rely on underlying connectivity to ensure reliable communication and timely coordination. This paper studies the line-of-sight (LoS) connectivity maintenance problem in multi-robot navigation with unknown obstacles. Prior works typically assume known environment maps to formulate LoS constraints between robots, which hinders their practical deployment. To overcome this limitation, we propose an inherently distributed approach where each robot only constructs an egocentric visible region based on its real-time LiDAR scans, instead of endeavoring to build a global map online. The individual visible regions are shared through distributed communication to establish inter-robot LoS constraints, which are then incorporated into a multi-robot navigation framework to ensure LoS-connectivity. Moreover, we enhance the robustness of connectivity maintenance by proposing a more accurate LoS-distance metric, which further enables flexible topology optimization that eliminates redundant and effort-demanding connections. The proposed framework is evaluated through extensive multi-robot navigation and exploration tasks in both simulation and real-world experiments. Results show that it reliably maintains LoS-connectivity between robots in challenging environments cluttered with obstacles, even under large visible ranges and fragile minimal topologies, where existing methods consistently fail. Ablation studies also reveal that topology optimization boosts navigation efficiency by around $20\%$, demonstrating the framework's potential for efficient navigation under connectivity constraints.
ImagiNav: Scalable Embodied Navigation via Generative Visual Prediction and Inverse Dynamics
Mar 14, 2026Enabling robots to navigate open-world environments via natural language is critical for general-purpose autonomy. Yet, Vision-Language Navigation has relied on end-to-end policies trained on expensive, embodiment-specific robot data. While recent foundation models trained on vast simulation data show promise, the challenge of scaling and generalizing due to the limited scene diversity and visual fidelity in simulation persists. To address this gap, we propose ImagiNav, a novel modular paradigm that decouples visual planning from robot actuation, enabling the direct utilization of diverse in-the-wild navigation videos. Our framework operates as a hierarchy: a Vision-Language Model first decomposes instructions into textual subgoals; a finetuned generative video model then imagines the future video trajectory towards that subgoal; finally, an inverse dynamics model extracts the trajectory from the imagined video, which can then be tracked via a low-level controller. We additionally develop a scalable data pipeline of in-the-wild navigation videos auto-labeled via inverse dynamics and a pretrained Vision-Language Model. ImagiNav demonstrates strong zero-shot transfer to robot navigation without requiring robot demonstrations, paving the way for generalist robots that learn navigation directly from unlabeled, open-world data.
Beyond Imitation: Reinforcement Learning Fine-Tuning for Adaptive Diffusion Navigation Policies
Mar 13, 2026Diffusion-based robot navigation policies trained on large-scale imitation learning datasets, can generate multi-modal trajectories directly from the robot's visual observations, bypassing the traditional localization-mapping-planning pipeline and achieving strong zero-shot generalization. However, their performance remains constrained by the coverage of offline datasets, and when deployed in unseen settings, distribution shift often leads to accumulated trajectory errors and safety-critical failures. Adapting diffusion policies with reinforcement learning is challenging because their iterative denoising structure hinders effective gradient backpropagation, while also making the training of an additional value network computationally expensive and less stable. To address these issues, we propose a reinforcement learning fine-tuning framework tailored for diffusion-based navigation. The method leverages the inherent multi-trajectory sampling mechanism of diffusion models and adopts Group Relative Policy Optimization (GRPO), which estimates relative advantages across sampled trajectories without requiring a separate value network. To preserve pretrained representations while enabling adaptation, we freeze the visual encoder and selectively update the higher decoder layers and action head, enhancing safety-aware behaviors through online environmental feedback. On the PointGoal task in Isaac Sim, our approach improves the Success Rate from 52.0% to 58.7% and SPL from 0.49 to 0.54 on unseen scenes, while reducing collision frequency. Additional experiments show that the fine-tuned policy transfers zero-shot to a real quadruped platform and maintains stable performance in geometrically out-of-distribution environments, suggesting improved adaptability and safe generalization to new domains.
TIDAL: Temporally Interleaved Diffusion and Action Loop for High-Frequency VLA Control
Jan 21, 2026Large-scale Vision-Language-Action (VLA) models offer semantic generalization but suffer from high inference latency, limiting them to low-frequency batch-and-execute paradigm. This frequency mismatch creates an execution blind spot, causing failures in dynamic environments where targets move during the open-loop execution window. We propose TIDAL (Temporally Interleaved Diffusion and Action Loop), a hierarchical framework that decouples semantic reasoning from high-frequency actuation. TIDAL operates as a backbone-agnostic module for diffusion-based VLAs, using a dual-frequency architecture to redistribute the computational budget. Specifically, a low-frequency macro-intent loop caches semantic embeddings, while a high-frequency micro-control loop interleaves single-step flow integration with execution. This design enables approximately 9 Hz control updates on edge hardware (vs. approximately 2.4 Hz baselines) without increasing marginal overhead. To handle the resulting latency shift, we introduce a temporally misaligned training strategy where the policy learns predictive compensation using stale semantic intent alongside real-time proprioception. Additionally, we address the insensitivity of static vision encoders to velocity by incorporating a differential motion predictor. TIDAL is architectural, making it orthogonal to system-level optimizations. Experiments show a 2x performance gain over open-loop baselines in dynamic interception tasks. Despite a marginal regression in static success rates, our approach yields a 4x increase in feedback frequency and extends the effective horizon of semantic embeddings beyond the native action chunk size. Under non-paused inference protocols, TIDAL remains robust where standard baselines fail due to latency.
FinMMDocR: Benchmarking Financial Multimodal Reasoning with Scenario Awareness, Document Understanding, and Multi-Step Computation
Dec 31, 2025We introduce FinMMDocR, a novel bilingual multimodal benchmark for evaluating multimodal large language models (MLLMs) on real-world financial numerical reasoning. Compared to existing benchmarks, our work delivers three major advancements. (1) Scenario Awareness: 57.9% of 1,200 expert-annotated problems incorporate 12 types of implicit financial scenarios (e.g., Portfolio Management), challenging models to perform expert-level reasoning based on assumptions; (2) Document Understanding: 837 Chinese/English documents spanning 9 types (e.g., Company Research) average 50.8 pages with rich visual elements, significantly surpassing existing benchmarks in both breadth and depth of financial documents; (3) Multi-Step Computation: Problems demand 11-step reasoning on average (5.3 extraction + 5.7 calculation steps), with 65.0% requiring cross-page evidence (2.4 pages average). The best-performing MLLM achieves only 58.0% accuracy, and different retrieval-augmented generation (RAG) methods show significant performance variations on this task. We expect FinMMDocR to drive improvements in MLLMs and reasoning-enhanced methods on complex multimodal reasoning tasks in real-world scenarios.
Following Is All You Need: Robot Crowd Navigation Using People As Planners
Apr 15, 2025Navigating in crowded environments requires the robot to be equipped with high-level reasoning and planning techniques. Existing works focus on developing complex and heavyweight planners while ignoring the role of human intelligence. Since humans are highly capable agents who are also widely available in a crowd navigation setting, we propose an alternative scheme where the robot utilises people as planners to benefit from their effective planning decisions and social behaviours. Through a set of rule-based evaluations, we identify suitable human leaders who exhibit the potential to guide the robot towards its goal. Using a simple base planner, the robot follows the selected leader through shorthorizon subgoals that are designed to be straightforward to achieve. We demonstrate through both simulated and real-world experiments that our novel framework generates safe and efficient robot plans compared to existing planners, even without predictive or data-driven modules. Our method also brings human-like robot behaviours without explicitly defining traffic rules and social norms. Code will be available at https://github.com/centiLinda/PeopleAsPlanner.git.
AirSwarm: Enabling Cost-Effective Multi-UAV Research with COTS drones
Mar 10, 2025Traditional unmanned aerial vehicle (UAV) swarm missions rely heavily on expensive custom-made drones with onboard perception or external positioning systems, limiting their widespread adoption in research and education. To address this issue, we propose AirSwarm. AirSwarm democratizes multi-drone coordination using low-cost commercially available drones such as Tello or Anafi, enabling affordable swarm aerial robotics research and education. Key innovations include a hierarchical control architecture for reliable multi-UAV coordination, an infrastructure-free visual SLAM system for precise localization without external motion capture, and a ROS-based software framework for simplified swarm development. Experiments demonstrate cm-level tracking accuracy, low-latency control, communication failure resistance, formation flight, and trajectory tracking. By reducing financial and technical barriers, AirSwarm makes multi-robot education and research more accessible. The complete instructions and open source code will be available at
Realm: Real-Time Line-of-Sight Maintenance in Multi-Robot Navigation with Unknown Obstacles
Feb 21, 2025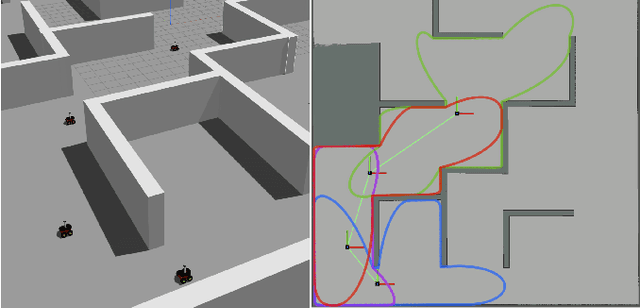
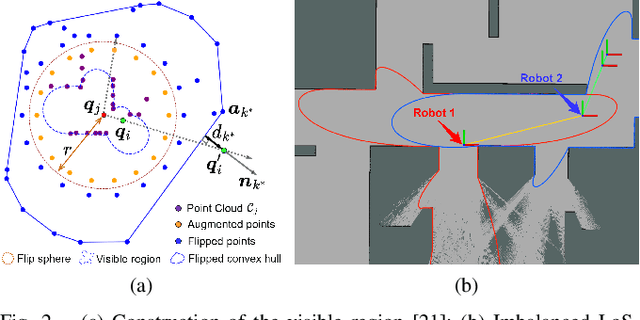
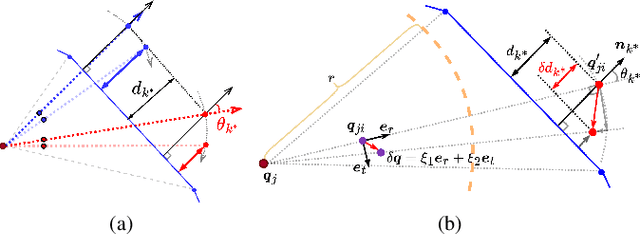
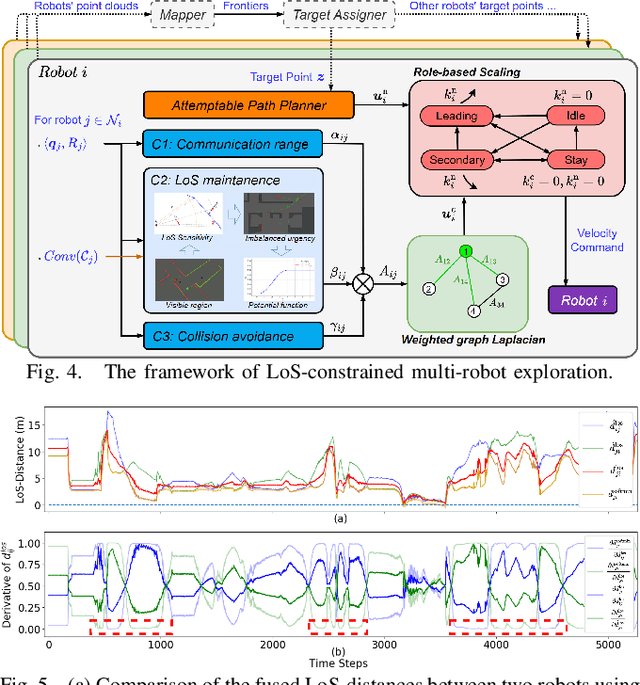
Multi-robot navigation in complex environments relies on inter-robot communication and mutual observations for coordination and situational awareness. This paper studies the multi-robot navigation problem in unknown environments with line-of-sight (LoS) connectivity constraints. While previous works are limited to known environment models to derive the LoS constraints, this paper eliminates such requirements by directly formulating the LoS constraints between robots from their real-time point cloud measurements, leveraging point cloud visibility analysis techniques. We propose a novel LoS-distance metric to quantify both the urgency and sensitivity of losing LoS between robots considering potential robot movements. Moreover, to address the imbalanced urgency of losing LoS between two robots, we design a fusion function to capture the overall urgency while generating gradients that facilitate robots' collaborative movement to maintain LoS. The LoS constraints are encoded into a potential function that preserves the positivity of the Fiedler eigenvalue of the robots' network graph to ensure connectivity. Finally, we establish a LoS-constrained exploration framework that integrates the proposed connectivity controller. We showcase its applications in multi-robot exploration in complex unknown environments, where robots can always maintain the LoS connectivity through distributed sensing and communication, while collaboratively mapping the unknown environment. The implementations are open-sourced at https://github.com/bairuofei/LoS_constrained_navigation.