 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Graph Exploration with Reduced Pose-SLAM Uncertainty via Submodular Optimization
Paper and Code
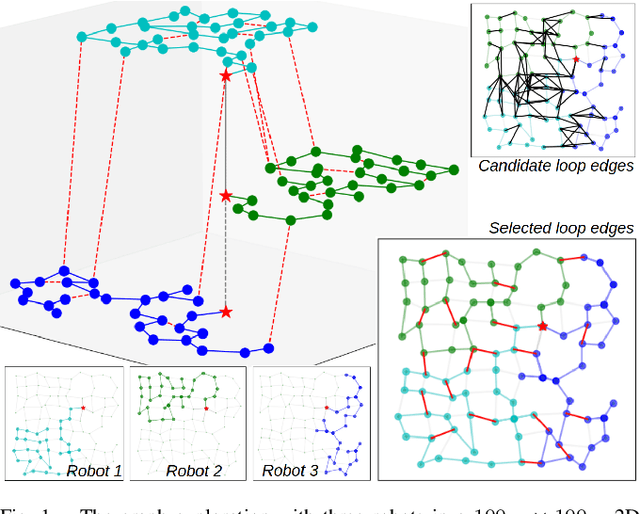
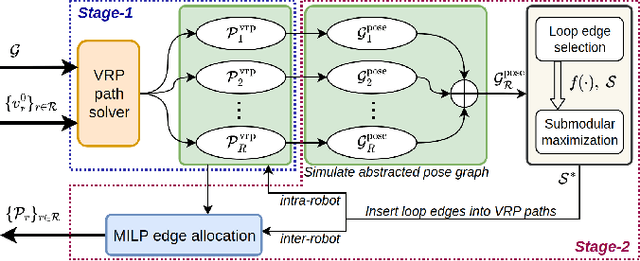
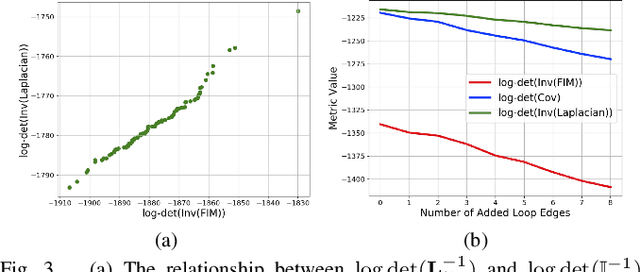
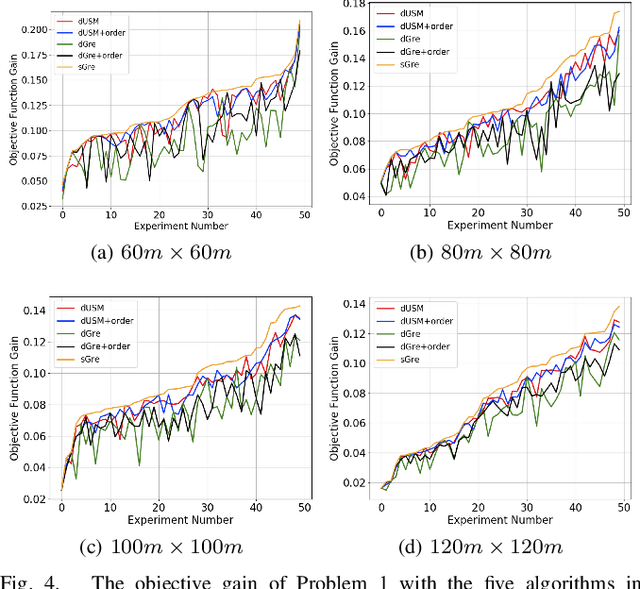
This paper considers the collaborative graph exploration problem in GPS-denied environments, where a group of robots are required to cover a graph environment while maintaining reliable pose estimations in collaborative simultaneous localization and mapping (SLAM). Considering both objectives presents challenges for multi-robot pathfinding, as it involves the expensive covariance inference for SLAM uncertainty evaluation, especially considering various combinations of robots' paths. To reduce the computational complexity, we propose an efficient two-stage strategy where exploration paths are first generated for quick coverage, and then enhanced by adding informative and distance-efficient loop-closing actions, called loop edges, along the paths for reliable pose estimation. We formulate the latter problem as a non-monotone submodular maximization problem by relating SLAM uncertainty with pose graph topology, which (1) facilitates more efficient evaluation of SLAM uncertainty than covariance inference, and (2) allows the application of approximation algorithms in submodular optimization to provide optimality guarantees. We further introduce the ordering heuristics to improve objective values while preserving the optimality bound. Simulation experiments over randomly generated graph environments verify the efficiency of our methods in finding paths for quick coverage and enhanced pose graph reliability, and benchmark the performance of the approximation algorithms and the greedy-based algorithm in the loop edge selection problem. Our implementations will be open-source at https://github.com/bairuofei/CGE.