 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLine-of-Sight-Constrained Multi-Robot Mapless Navigation via Polygonal Visible Regions
Mar 27, 2026Multi-robot systems rely on underlying connectivity to ensure reliable communication and timely coordination. This paper studies the line-of-sight (LoS) connectivity maintenance problem in multi-robot navigation with unknown obstacles. Prior works typically assume known environment maps to formulate LoS constraints between robots, which hinders their practical deployment. To overcome this limitation, we propose an inherently distributed approach where each robot only constructs an egocentric visible region based on its real-time LiDAR scans, instead of endeavoring to build a global map online. The individual visible regions are shared through distributed communication to establish inter-robot LoS constraints, which are then incorporated into a multi-robot navigation framework to ensure LoS-connectivity. Moreover, we enhance the robustness of connectivity maintenance by proposing a more accurate LoS-distance metric, which further enables flexible topology optimization that eliminates redundant and effort-demanding connections. The proposed framework is evaluated through extensive multi-robot navigation and exploration tasks in both simulation and real-world experiments. Results show that it reliably maintains LoS-connectivity between robots in challenging environments cluttered with obstacles, even under large visible ranges and fragile minimal topologies, where existing methods consistently fail. Ablation studies also reveal that topology optimization boosts navigation efficiency by around $20\%$, demonstrating the framework's potential for efficient navigation under connectivity constraints.
Beyond Imitation: Reinforcement Learning Fine-Tuning for Adaptive Diffusion Navigation Policies
Mar 13, 2026Diffusion-based robot navigation policies trained on large-scale imitation learning datasets, can generate multi-modal trajectories directly from the robot's visual observations, bypassing the traditional localization-mapping-planning pipeline and achieving strong zero-shot generalization. However, their performance remains constrained by the coverage of offline datasets, and when deployed in unseen settings, distribution shift often leads to accumulated trajectory errors and safety-critical failures. Adapting diffusion policies with reinforcement learning is challenging because their iterative denoising structure hinders effective gradient backpropagation, while also making the training of an additional value network computationally expensive and less stable. To address these issues, we propose a reinforcement learning fine-tuning framework tailored for diffusion-based navigation. The method leverages the inherent multi-trajectory sampling mechanism of diffusion models and adopts Group Relative Policy Optimization (GRPO), which estimates relative advantages across sampled trajectories without requiring a separate value network. To preserve pretrained representations while enabling adaptation, we freeze the visual encoder and selectively update the higher decoder layers and action head, enhancing safety-aware behaviors through online environmental feedback. On the PointGoal task in Isaac Sim, our approach improves the Success Rate from 52.0% to 58.7% and SPL from 0.49 to 0.54 on unseen scenes, while reducing collision frequency. Additional experiments show that the fine-tuned policy transfers zero-shot to a real quadruped platform and maintains stable performance in geometrically out-of-distribution environments, suggesting improved adaptability and safe generalization to new domains.
CL-CoTNav: Closed-Loop Hierarchical Chain-of-Thought for Zero-Shot Object-Goal Navigation with Vision-Language Models
Apr 11, 2025Visual Object Goal Navigation (ObjectNav) requires a robot to locate a target object in an unseen environment using egocentric observations. However, decision-making policies often struggle to transfer to unseen environments and novel target objects, which is the core generalization problem. Traditional end-to-end learning methods exacerbate this issue, as they rely on memorizing spatial patterns rather than employing structured reasoning, limiting their ability to generalize effectively. In this letter, we introduce Closed-Loop Hierarchical Chain-of-Thought Navigation (CL-CoTNav), a vision-language model (VLM)-driven ObjectNav framework that integrates structured reasoning and closed-loop feedback into navigation decision-making. To enhance generalization, we fine-tune a VLM using multi-turn question-answering (QA) data derived from human demonstration trajectories. This structured dataset enables hierarchical Chain-of-Thought (H-CoT) prompting, systematically extracting compositional knowledge to refine perception and decision-making, inspired by the human cognitive process of locating a target object through iterative reasoning steps. Additionally, we propose a Closed-Loop H-CoT mechanism that incorporates detection and reasoning confidence scores into training. This adaptive weighting strategy guides the model to prioritize high-confidence data pairs, mitigating the impact of noisy inputs and enhancing robustness against hallucinated or incorrect reasoning. Extensive experiments in the AI Habitat environment demonstrate CL-CoTNav's superior generalization to unseen scenes and novel object categories. Our method consistently outperforms state-of-the-art approaches in navigation success rate (SR) and success weighted by path length (SPL) by 22.4\%. We release our datasets, models, and supplementary videos on our project page.
Realm: Real-Time Line-of-Sight Maintenance in Multi-Robot Navigation with Unknown Obstacles
Feb 21, 2025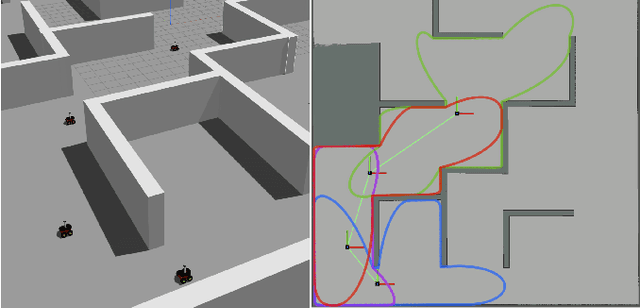
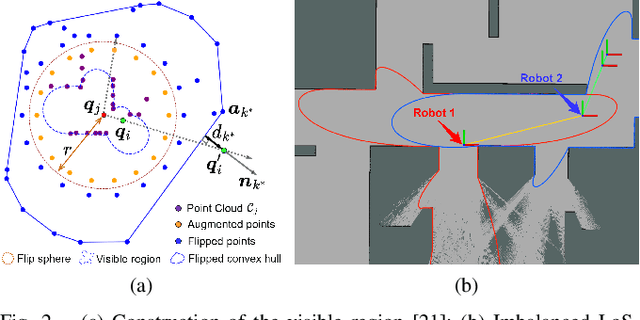
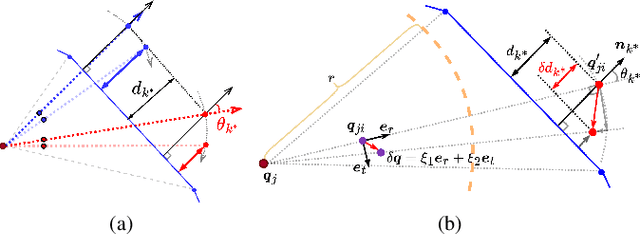
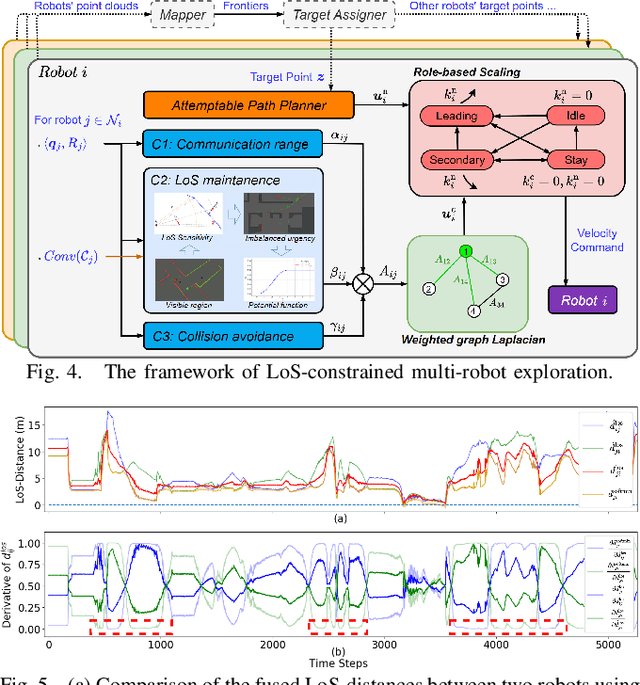
Multi-robot navigation in complex environments relies on inter-robot communication and mutual observations for coordination and situational awareness. This paper studies the multi-robot navigation problem in unknown environments with line-of-sight (LoS) connectivity constraints. While previous works are limited to known environment models to derive the LoS constraints, this paper eliminates such requirements by directly formulating the LoS constraints between robots from their real-time point cloud measurements, leveraging point cloud visibility analysis techniques. We propose a novel LoS-distance metric to quantify both the urgency and sensitivity of losing LoS between robots considering potential robot movements. Moreover, to address the imbalanced urgency of losing LoS between two robots, we design a fusion function to capture the overall urgency while generating gradients that facilitate robots' collaborative movement to maintain LoS. The LoS constraints are encoded into a potential function that preserves the positivity of the Fiedler eigenvalue of the robots' network graph to ensure connectivity. Finally, we establish a LoS-constrained exploration framework that integrates the proposed connectivity controller. We showcase its applications in multi-robot exploration in complex unknown environments, where robots can always maintain the LoS connectivity through distributed sensing and communication, while collaboratively mapping the unknown environment. The implementations are open-sourced at https://github.com/bairuofei/LoS_constrained_navigation.
Multi-Robot Reliable Navigation in Uncertain Topological Environments with Graph Attention Networks
Nov 25, 2024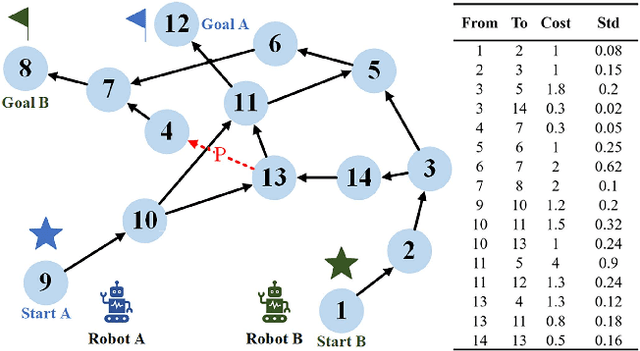
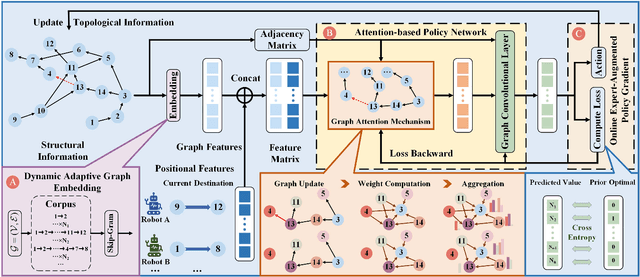
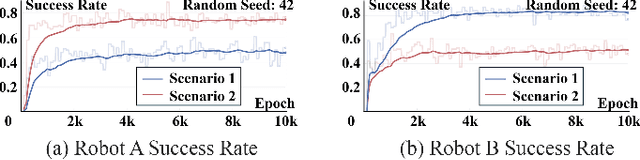
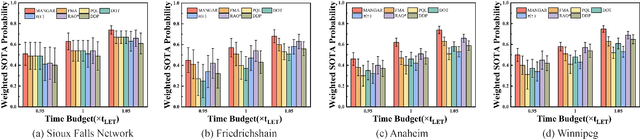
This paper studies the multi-robot reliable navigation problem in uncertain topological networks, which aims at maximizing the robot team's on-time arrival probabilities in the face of road network uncertainties. The uncertainty in these networks stems from the unknown edge traversability, which is only revealed to the robot upon its arrival at the edge's starting node. Existing approaches often struggle to adapt to real-time network topology changes, making them unsuitable for varying topological environments. To address the challenge, we reformulate the problem into a Partially Observable Markov Decision Process (POMDP) framework and introduce the Dynamic Adaptive Graph Embedding method to capture the evolving nature of the navigation task. We further enhance each robot's policy learning process by integrating deep reinforcement learning with Graph Attention Networks (GATs), leveraging self-attention to focus on critical graph features. The proposed approach, namely Multi-Agent Routing in Variable Environments with Learning (MARVEL) employs the generalized policy gradient algorithm to optimize the robots' real-time decision-making process iteratively. We compare the performance of MARVEL with state-of-the-art reliable navigation algorithms as well as Canadian traveller problem solutions in a range of canonical transportation networks, demonstrating improved adaptability and performance in uncertain topological networks. Additionally, real-world experiments with two robots navigating within a self-constructed indoor environment with uncertain topological structures demonstrate MARVEL's practicality.
Collaborative Graph Exploration with Reduced Pose-SLAM Uncertainty via Submodular Optimization
Jul 01, 2024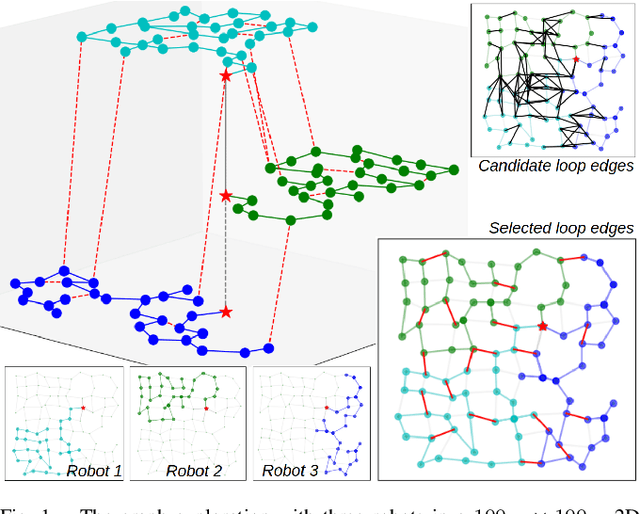
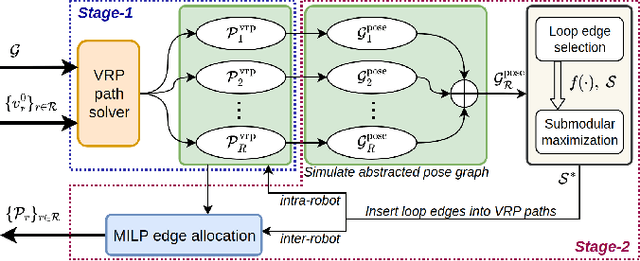
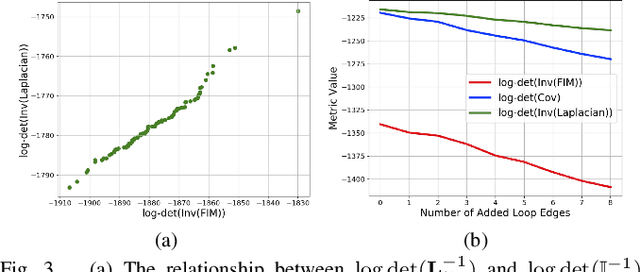
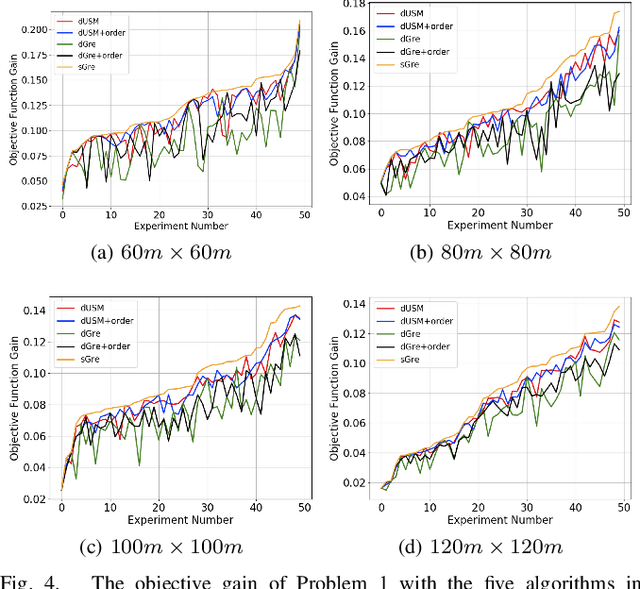
This paper considers the collaborative graph exploration problem in GPS-denied environments, where a group of robots are required to cover a graph environment while maintaining reliable pose estimations in collaborative simultaneous localization and mapping (SLAM). Considering both objectives presents challenges for multi-robot pathfinding, as it involves the expensive covariance inference for SLAM uncertainty evaluation, especially considering various combinations of robots' paths. To reduce the computational complexity, we propose an efficient two-stage strategy where exploration paths are first generated for quick coverage, and then enhanced by adding informative and distance-efficient loop-closing actions, called loop edges, along the paths for reliable pose estimation. We formulate the latter problem as a non-monotone submodular maximization problem by relating SLAM uncertainty with pose graph topology, which (1) facilitates more efficient evaluation of SLAM uncertainty than covariance inference, and (2) allows the application of approximation algorithms in submodular optimization to provide optimality guarantees. We further introduce the ordering heuristics to improve objective values while preserving the optimality bound. Simulation experiments over randomly generated graph environments verify the efficiency of our methods in finding paths for quick coverage and enhanced pose graph reliability, and benchmark the performance of the approximation algorithms and the greedy-based algorithm in the loop edge selection problem. Our implementations will be open-source at https://github.com/bairuofei/CGE.
Graph-based SLAM-Aware Exploration with Prior Topo-Metric Information
Aug 31, 2023Autonomous exploration requires the robot to explore an unknown environment while constructing an accurate map with the SLAM (Simultaneous Localization and Mapping) techniques. Without prior information, the exploratory performance is usually conservative due to the limited planning horizon. This paper exploits a prior topo-metric graph of the environment to benefit both the exploration efficiency and the pose graph accuracy in SLAM. Based on recent advancements in relating pose graph reliability with graph topology, we are able to formulate both objectives into a SLAM-aware path planning problem over the prior graph, which finds a fast exploration path with informative loop closures that globally stabilize the pose graph. Furthermore, we derive theoretical thresholds to speed up the greedy algorithm to the problem, which significantly prune non-optimal loop closures in iterations. The proposed planner is incorporated into a hierarchical exploration framework, with flexible features including path replanning and online prior map update that adds additional information to the prior graph. Extensive experiments indicate that our method has comparable exploration efficiency to others while consistently maintaining higher mapping accuracy in various environments. Our implementations will be open-source on GitHub.