 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCROSS: A Mixture-of-Experts Reinforcement Learning Framework for Generalizable Large-Scale Traffic Signal Control
Mar 26, 2026Recent advances in robotics, automation, and artificial intelligence have enabled urban traffic systems to operate with increasing autonomy towards future smart cities, powered in part by the development of adaptive traffic signal control (ATSC), which dynamically optimizes signal phases to mitigate congestion and optimize traffic. However, achieving effective and generalizable large-scale ATSC remains a significant challenge due to the diverse intersection topologies and highly dynamic, complex traffic demand patterns across the network. Existing RL-based methods typically use a single shared policy for all scenarios, whose limited representational capacity makes it difficult to capture diverse traffic dynamics and generalize to unseen environments. To address these challenges, we propose CROSS, a novel Mixture-of-Experts (MoE)-based decentralized RL framework for generalizable ATSC. We first introduce a Predictive Contrastive Clustering (PCC) module that forecasts short-term state transitions to identify latent traffic patterns, followed by clustering and contrastive learning to enhance pattern-level representation. We further design a Scenario-Adaptive MoE module that augments a shared policy with multiple experts, thus enabling adaptive specialization and more flexible scenario-specific strategies. We conduct extensive experiments in the SUMO simulator on both synthetic and real-world traffic datasets. Compared with state-of-the-art baselines, CROSS achieves superior performance and generalization through improved representation of diverse traffic scenarios.
Heterogeneous Vertiport Selection Optimization for On-Demand Air Taxi Services: A Deep Reinforcement Learning Approach
Jan 29, 2026Urban Air Mobility (UAM) has emerged as a transformative solution to alleviate urban congestion by utilizing low-altitude airspace, thereby reducing pressure on ground transportation networks. To enable truly efficient and seamless door-to-door travel experiences, UAM requires close integration with existing ground transportation infrastructure. However, current research on optimal integrated routing strategies for passengers in air-ground mobility systems remains limited, with a lack of systematic exploration.To address this gap, we first propose a unified optimization model that integrates strategy selection for both air and ground transportation. This model captures the dynamic characteristics of multimodal transport networks and incorporates real-time traffic conditions alongside passenger decision-making behavior. Building on this model, we propose a Unified Air-Ground Mobility Coordination (UAGMC) framework, which leverages deep reinforcement learning (RL) and Vehicle-to-Everything (V2X) communication to optimize vertiport selection and dynamically plan air taxi routes. Experimental results demonstrate that UAGMC achieves a 34\% reduction in average travel time compared to conventional proportional allocation methods, enhancing overall travel efficiency and providing novel insights into the integration and optimization of multimodal transportation systems. This work lays a solid foundation for advancing intelligent urban mobility solutions through the coordination of air and ground transportation modes. The related code can be found at https://github.com/Traffic-Alpha/UAGMC.
VLMLight: Traffic Signal Control via Vision-Language Meta-Control and Dual-Branch Reasoning
May 26, 2025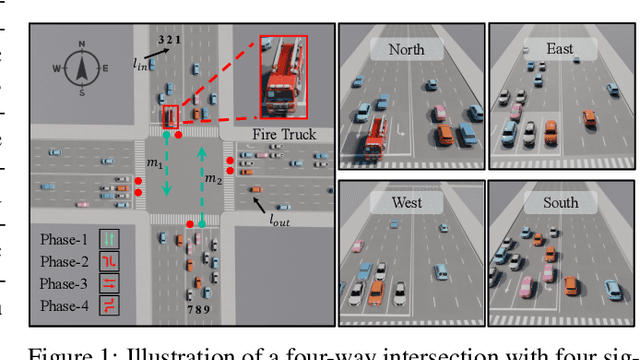

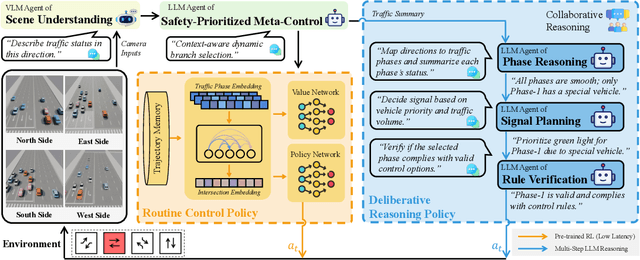

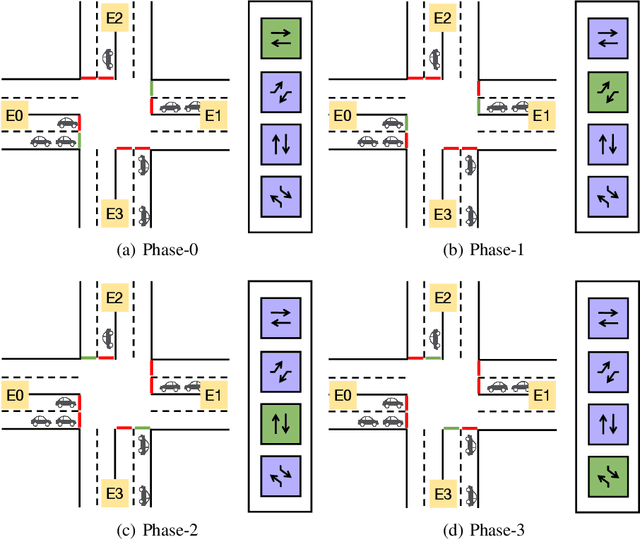
Traffic signal control (TSC) is a core challenge in urban mobility, where real-time decisions must balance efficiency and safety. Existing methods - ranging from rule-based heuristics to reinforcement learning (RL) - often struggle to generalize to complex, dynamic, and safety-critical scenarios. We introduce VLMLight, a novel TSC framework that integrates vision-language meta-control with dual-branch reasoning. At the core of VLMLight is the first image-based traffic simulator that enables multi-view visual perception at intersections, allowing policies to reason over rich cues such as vehicle type, motion, and spatial density. A large language model (LLM) serves as a safety-prioritized meta-controller, selecting between a fast RL policy for routine traffic and a structured reasoning branch for critical cases. In the latter, multiple LLM agents collaborate to assess traffic phases, prioritize emergency vehicles, and verify rule compliance. Experiments show that VLMLight reduces waiting times for emergency vehicles by up to 65% over RL-only systems, while preserving real-time performance in standard conditions with less than 1% degradation. VLMLight offers a scalable, interpretable, and safety-aware solution for next-generation traffic signal control.
A Large Language Model-Enhanced Q-learning for Capacitated Vehicle Routing Problem with Time Windows
May 09, 2025



The Capacitated Vehicle Routing Problem with Time Windows (CVRPTW) is a classic NP-hard combinatorial optimization problem widely applied in logistics distribution and transportation management. Its complexity stems from the constraints of vehicle capacity and time windows, which pose significant challenges to traditional approaches. Advances in Large Language Models (LLMs) provide new possibilities for finding approximate solutions to CVRPTW. This paper proposes a novel LLM-enhanced Q-learning framework to address the CVRPTW with real-time emergency constraints. Our solution introduces an adaptive two-phase training mechanism that transitions from the LLM-guided exploration phase to the autonomous optimization phase of Q-network. To ensure reliability, we design a three-tier self-correction mechanism based on the Chain-of-Thought (CoT) for LLMs: syntactic validation, semantic verification, and physical constraint enforcement. In addition, we also prioritized replay of the experience generated by LLMs to amplify the regulatory role of LLMs in the architecture. Experimental results demonstrate that our framework achieves a 7.3\% average reduction in cost compared to traditional Q-learning, with fewer training steps required for convergence.
CL-CoTNav: Closed-Loop Hierarchical Chain-of-Thought for Zero-Shot Object-Goal Navigation with Vision-Language Models
Apr 11, 2025Visual Object Goal Navigation (ObjectNav) requires a robot to locate a target object in an unseen environment using egocentric observations. However, decision-making policies often struggle to transfer to unseen environments and novel target objects, which is the core generalization problem. Traditional end-to-end learning methods exacerbate this issue, as they rely on memorizing spatial patterns rather than employing structured reasoning, limiting their ability to generalize effectively. In this letter, we introduce Closed-Loop Hierarchical Chain-of-Thought Navigation (CL-CoTNav), a vision-language model (VLM)-driven ObjectNav framework that integrates structured reasoning and closed-loop feedback into navigation decision-making. To enhance generalization, we fine-tune a VLM using multi-turn question-answering (QA) data derived from human demonstration trajectories. This structured dataset enables hierarchical Chain-of-Thought (H-CoT) prompting, systematically extracting compositional knowledge to refine perception and decision-making, inspired by the human cognitive process of locating a target object through iterative reasoning steps. Additionally, we propose a Closed-Loop H-CoT mechanism that incorporates detection and reasoning confidence scores into training. This adaptive weighting strategy guides the model to prioritize high-confidence data pairs, mitigating the impact of noisy inputs and enhancing robustness against hallucinated or incorrect reasoning. Extensive experiments in the AI Habitat environment demonstrate CL-CoTNav's superior generalization to unseen scenes and novel object categories. Our method consistently outperforms state-of-the-art approaches in navigation success rate (SR) and success weighted by path length (SPL) by 22.4\%. We release our datasets, models, and supplementary videos on our project page.
iLLM-TSC: Integration reinforcement learning and large language model for traffic signal control policy improvement
Jul 08, 2024
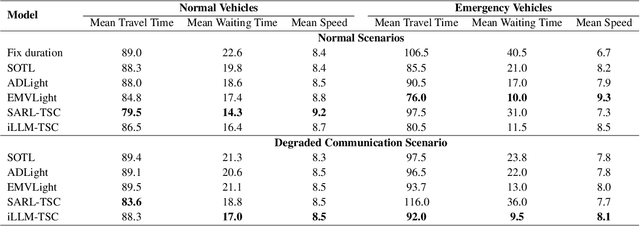
Urban congestion remains a critical challenge, with traffic signal control (TSC) emerging as a potent solution. TSC is often modeled as a Markov Decision Process problem and then solved using reinforcement learning (RL), which has proven effective. However, the existing RL-based TSC system often overlooks imperfect observations caused by degraded communication, such as packet loss, delays, and noise, as well as rare real-life events not included in the reward function, such as unconsidered emergency vehicles. To address these limitations, we introduce a novel integration framework that combines a large language model (LLM) with RL. This framework is designed to manage overlooked elements in the reward function and gaps in state information, thereby enhancing the policies of RL agents. In our approach, RL initially makes decisions based on observed data. Subsequently, LLMs evaluate these decisions to verify their reasonableness. If a decision is found to be unreasonable, it is adjusted accordingly. Additionally, this integration approach can be seamlessly integrated with existing RL-based TSC systems without necessitating modifications. Extensive testing confirms that our approach reduces the average waiting time by $17.5\%$ in degraded communication conditions as compared to traditional RL methods, underscoring its potential to advance practical RL applications in intelligent transportation systems. The related code can be found at \url{https://github.com/Traffic-Alpha/iLLM-TSC}.
LLM-Assisted Light: Leveraging Large Language Model Capabilities for Human-Mimetic Traffic Signal Control in Complex Urban Environments
Mar 13, 2024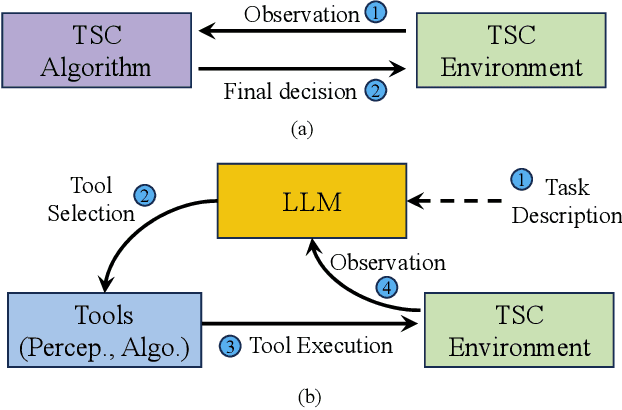
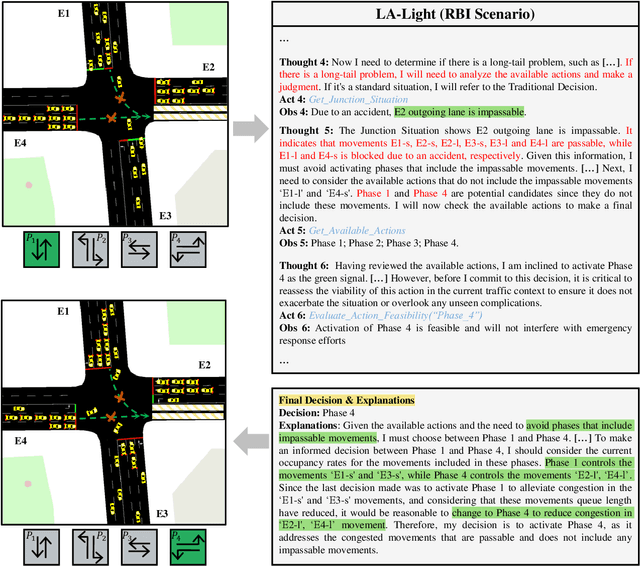

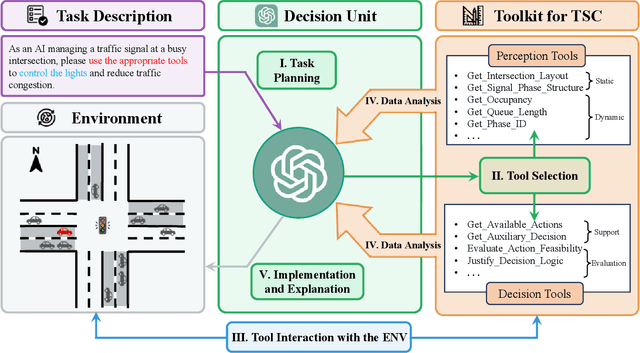
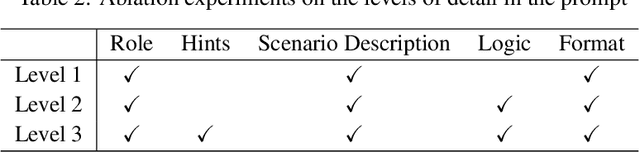
Traffic congestion in metropolitan areas presents a formidable challenge with far-reaching economic, environmental, and societal ramifications. Therefore, effective congestion management is imperative, with traffic signal control (TSC) systems being pivotal in this endeavor. Conventional TSC systems, designed upon rule-based algorithms or reinforcement learning (RL), frequently exhibit deficiencies in managing the complexities and variabilities of urban traffic flows, constrained by their limited capacity for adaptation to unfamiliar scenarios. In response to these limitations, this work introduces an innovative approach that integrates Large Language Models (LLMs) into TSC, harnessing their advanced reasoning and decision-making faculties. Specifically, a hybrid framework that augments LLMs with a suite of perception and decision-making tools is proposed, facilitating the interrogation of both the static and dynamic traffic information. This design places the LLM at the center of the decision-making process, combining external traffic data with established TSC methods. Moreover, a simulation platform is developed to corroborate the efficacy of the proposed framework. The findings from our simulations attest to the system's adeptness in adjusting to a multiplicity of traffic environments without the need for additional training. Notably, in cases of Sensor Outage (SO), our approach surpasses conventional RL-based systems by reducing the average waiting time by $20.4\%$. This research signifies a notable advance in TSC strategies and paves the way for the integration of LLMs into real-world, dynamic scenarios, highlighting their potential to revolutionize traffic management. The related code is available at \href{https://github.com/Traffic-Alpha/LLM-Assisted-Light}{https://github.com/Traffic-Alpha/LLM-Assisted-Light}.
UniTSA: A Universal Reinforcement Learning Framework for V2X Traffic Signal Control
Dec 08, 2023



Traffic congestion is a persistent problem in urban areas, which calls for the development of effective traffic signal control (TSC) systems. While existing Reinforcement Learning (RL)-based methods have shown promising performance in optimizing TSC, it is challenging to generalize these methods across intersections of different structures. In this work, a universal RL-based TSC framework is proposed for Vehicle-to-Everything (V2X) environments. The proposed framework introduces a novel agent design that incorporates a junction matrix to characterize intersection states, making the proposed model applicable to diverse intersections. To equip the proposed RL-based framework with enhanced capability of handling various intersection structures, novel traffic state augmentation methods are tailor-made for signal light control systems. Finally, extensive experimental results derived from multiple intersection configurations confirm the effectiveness of the proposed framework. The source code in this work is available at https://github.com/wmn7/Universal_Light
ADLight: A Universal Approach of Traffic Signal Control with Augmented Data Using Reinforcement Learning
Oct 24, 2022



Traffic signal control has the potential to reduce congestion in dynamic networks. Recent studies show that traffic signal control with reinforcement learning (RL) methods can significantly reduce the average waiting time. However, a shortcoming of existing methods is that they require model retraining for new intersections with different structures. In this paper, we propose a novel reinforcement learning approach with augmented data (ADLight) to train a universal model for intersections with different structures. We propose a new agent design incorporating features on movements and actions with set current phase duration to allow the generalized model to have the same structure for different intersections. A new data augmentation method named \textit{movement shuffle} is developed to improve the generalization performance. We also test the universal model with new intersections in Simulation of Urban MObility (SUMO). The results show that the performance of our approach is close to the models trained in a single environment directly (only a 5% loss of average waiting time), and we can reduce more than 80% of training time, which saves a lot of computational resources in scalable operations of traffic lights.