 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Think in Physics: Breaking Shortcut Learning in Scientific Diffusion via Representation Alignment
May 20, 2026Physics-informed diffusion models typically enforce PDE constraints only on final outputs, leaving intermediate representations unconstrained and prone to shortcut learning under shifted boundary conditions. We introduce **REPA-P**, a teacher-free, architecture-agnostic framework that aligns intermediate features with physical states using first-principles residuals. REPA-P attaches lightweight $1{\times}1$ projection heads to selected layers, decodes hidden activations into physical quantities, and applies PDE residual losses during training. These heads are discarded at inference, introducing **zero overhead**. Across four PDE tasks, including Darcy flow, topology optimization, electrostatic potential, and turbulent channel flow, REPA-P accelerates convergence by up to $2{\times}$, reduces physics residuals by up to $66.4\%$, and improves out-of-distribution robustness by up to $49.3\%$, with consistent gains on both U-Net and Diffusion Transformer backbones. Ablations show that supervising a small set of intermediate layers captures most benefits and complements output-level physics losses. Code is available at [https://github.com/Hxxxz0/REPA-P](https://github.com/Hxxxz0/REPA-P).
Large-Scale UWB Anchor Calibration and One-Shot Localization Using Gaussian Process
Dec 22, 2024



Ultra-wideband (UWB) is gaining popularity with devices like AirTags for precise home item localization but faces significant challenges when scaled to large environments like seaports. The main challenges are calibration and localization in obstructed conditions, which are common in logistics environments. Traditional calibration methods, dependent on line-of-sight (LoS), are slow, costly, and unreliable in seaports and warehouses, making large-scale localization a significant pain point in the industry. To overcome these challenges, we propose a UWB-LiDAR fusion-based calibration and one-shot localization framework. Our method uses Gaussian Processes to estimate anchor position from continuous-time LiDAR Inertial Odometry with sampled UWB ranges. This approach ensures accurate and reliable calibration with just one round of sampling in large-scale areas, I.e., 600x450 square meter. With the LoS issues, UWB-only localization can be problematic, even when anchor positions are known. We demonstrate that by applying a UWB-range filter, the search range for LiDAR loop closure descriptors is significantly reduced, improving both accuracy and speed. This concept can be applied to other loop closure detection methods, enabling cost-effective localization in large-scale warehouses and seaports. It significantly improves precision in challenging environments where UWB-only and LiDAR-Inertial methods fall short, as shown in the video \url{https://youtu.be/oY8jQKdM7lU }. We will open-source our datasets and calibration codes for community use.
SGBA: Semantic Gaussian Mixture Model-Based LiDAR Bundle Adjustment
Oct 02, 2024LiDAR bundle adjustment (BA) is an effective approach to reduce the drifts in pose estimation from the front-end. Existing works on LiDAR BA usually rely on predefined geometric features for landmark representation. This reliance restricts generalizability, as the system will inevitably deteriorate in environments where these specific features are absent. To address this issue, we propose SGBA, a LiDAR BA scheme that models the environment as a semantic Gaussian mixture model (GMM) without predefined feature types. This approach encodes both geometric and semantic information, offering a comprehensive and general representation adaptable to various environments. Additionally, to limit computational complexity while ensuring generalizability, we propose an adaptive semantic selection framework that selects the most informative semantic clusters for optimization by evaluating the condition number of the cost function. Lastly, we introduce a probabilistic feature association scheme that considers the entire probability density of assignments, which can manage uncertainties in measurement and initial pose estimation. We have conducted various experiments and the results demonstrate that SGBA can achieve accurate and robust pose refinement even in challenging scenarios with low-quality initial pose estimation and limited geometric features. We plan to open-source the work for the benefit of the community https://github.com/Ji1Xinyu/SGBA.
Collaborative Graph Exploration with Reduced Pose-SLAM Uncertainty via Submodular Optimization
Jul 01, 2024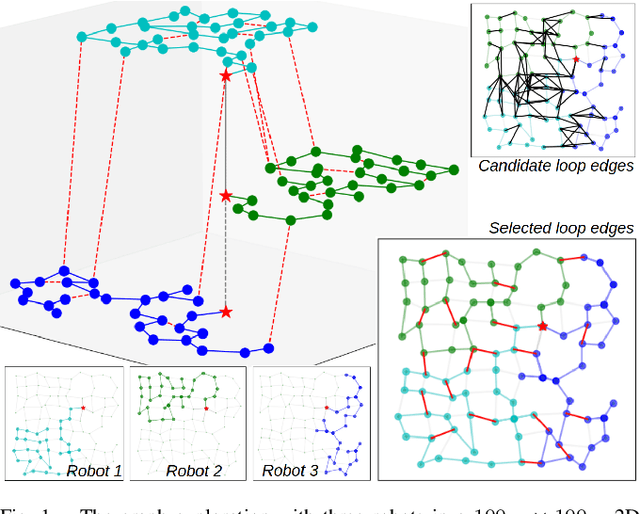
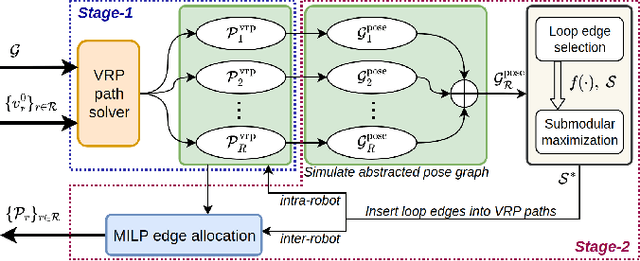
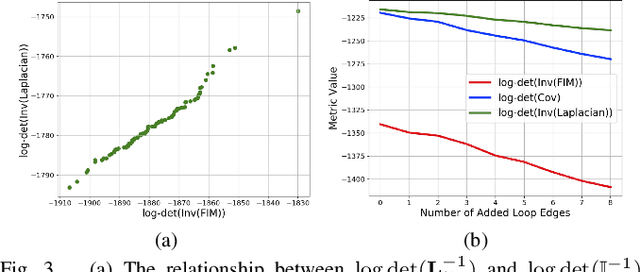
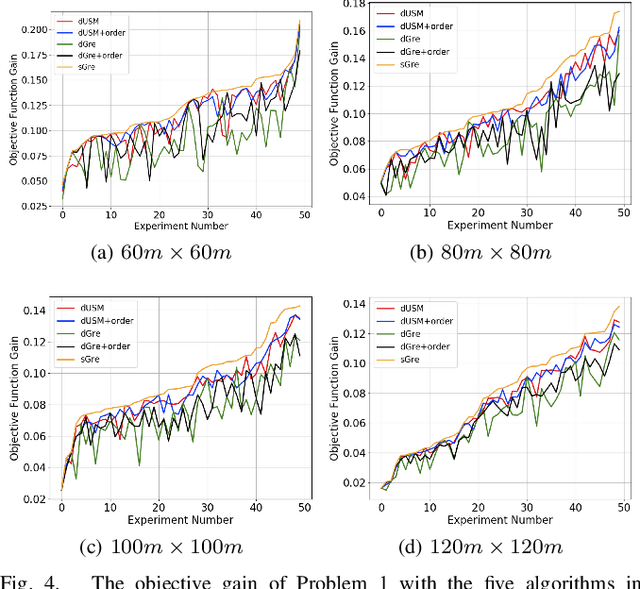
This paper considers the collaborative graph exploration problem in GPS-denied environments, where a group of robots are required to cover a graph environment while maintaining reliable pose estimations in collaborative simultaneous localization and mapping (SLAM). Considering both objectives presents challenges for multi-robot pathfinding, as it involves the expensive covariance inference for SLAM uncertainty evaluation, especially considering various combinations of robots' paths. To reduce the computational complexity, we propose an efficient two-stage strategy where exploration paths are first generated for quick coverage, and then enhanced by adding informative and distance-efficient loop-closing actions, called loop edges, along the paths for reliable pose estimation. We formulate the latter problem as a non-monotone submodular maximization problem by relating SLAM uncertainty with pose graph topology, which (1) facilitates more efficient evaluation of SLAM uncertainty than covariance inference, and (2) allows the application of approximation algorithms in submodular optimization to provide optimality guarantees. We further introduce the ordering heuristics to improve objective values while preserving the optimality bound. Simulation experiments over randomly generated graph environments verify the efficiency of our methods in finding paths for quick coverage and enhanced pose graph reliability, and benchmark the performance of the approximation algorithms and the greedy-based algorithm in the loop edge selection problem. Our implementations will be open-source at https://github.com/bairuofei/CGE.
MCD: Diverse Large-Scale Multi-Campus Dataset for Robot Perception
Mar 18, 2024Perception plays a crucial role in various robot applications. However, existing well-annotated datasets are biased towards autonomous driving scenarios, while unlabelled SLAM datasets are quickly over-fitted, and often lack environment and domain variations. To expand the frontier of these fields, we introduce a comprehensive dataset named MCD (Multi-Campus Dataset), featuring a wide range of sensing modalities, high-accuracy ground truth, and diverse challenging environments across three Eurasian university campuses. MCD comprises both CCS (Classical Cylindrical Spinning) and NRE (Non-Repetitive Epicyclic) lidars, high-quality IMUs (Inertial Measurement Units), cameras, and UWB (Ultra-WideBand) sensors. Furthermore, in a pioneering effort, we introduce semantic annotations of 29 classes over 59k sparse NRE lidar scans across three domains, thus providing a novel challenge to existing semantic segmentation research upon this largely unexplored lidar modality. Finally, we propose, for the first time to the best of our knowledge, continuous-time ground truth based on optimization-based registration of lidar-inertial data on large survey-grade prior maps, which are also publicly released, each several times the size of existing ones. We conduct a rigorous evaluation of numerous state-of-the-art algorithms on MCD, report their performance, and highlight the challenges awaiting solutions from the research community.
Reliable Spatial-Temporal Voxels For Multi-Modal Test-Time Adaptation
Mar 15, 2024Multi-modal test-time adaptation (MM-TTA) is proposed to adapt models to an unlabeled target domain by leveraging the complementary multi-modal inputs in an online manner. Previous MM-TTA methods rely on predictions of cross-modal information in each input frame, while they ignore the fact that predictions of geometric neighborhoods within consecutive frames are highly correlated, leading to unstable predictions across time. To fulfill this gap, we propose ReLiable Spatial-temporal Voxels (Latte), an MM-TTA method that leverages reliable cross-modal spatial-temporal correspondences for multi-modal 3D segmentation. Motivated by the fact that reliable predictions should be consistent with their spatial-temporal correspondences, Latte aggregates consecutive frames in a slide window manner and constructs ST voxel to capture temporally local prediction consistency for each modality. After filtering out ST voxels with high ST entropy, Latte conducts cross-modal learning for each point and pixel by attending to those with reliable and consistent predictions among both spatial and temporal neighborhoods. Experimental results show that Latte achieves state-of-the-art performance on three different MM-TTA benchmarks compared to previous MM-TTA or TTA methods.
MoPA: Multi-Modal Prior Aided Domain Adaptation for 3D Semantic Segmentation
Sep 21, 2023Multi-modal unsupervised domain adaptation (MM-UDA) for 3D semantic segmentation is a practical solution to embed semantic understanding in autonomous systems without expensive point-wise annotations. While previous MM-UDA methods can achieve overall improvement, they suffer from significant class-imbalanced performance, restricting their adoption in real applications. This imbalanced performance is mainly caused by: 1) self-training with imbalanced data and 2) the lack of pixel-wise 2D supervision signals. In this work, we propose Multi-modal Prior Aided (MoPA) domain adaptation to improve the performance of rare objects. Specifically, we develop Valid Ground-based Insertion (VGI) to rectify the imbalance supervision signals by inserting prior rare objects collected from the wild while avoiding introducing artificial artifacts that lead to trivial solutions. Meanwhile, our SAM consistency loss leverages the 2D prior semantic masks from SAM as pixel-wise supervision signals to encourage consistent predictions for each object in the semantic mask. The knowledge learned from modal-specific prior is then shared across modalities to achieve better rare object segmentation. Extensive experiments show that our method achieves state-of-the-art performance on the challenging MM-UDA benchmark. Code will be available at https://github.com/AronCao49/MoPA.
Outram: One-shot Global Localization via Triangulated Scene Graph and Global Outlier Pruning
Sep 16, 2023



One-shot LiDAR localization refers to the ability to estimate the robot pose from one single point cloud, which yields significant advantages in initialization and relocalization processes. In the point cloud domain, the topic has been extensively studied as a global descriptor retrieval (i.e., loop closure detection) and pose refinement (i.e., point cloud registration) problem both in isolation or combined. However, few have explicitly considered the relationship between candidate retrieval and correspondence generation in pose estimation, leaving them brittle to substructure ambiguities. To this end, we propose a hierarchical one-shot localization algorithm called Outram that leverages substructures of 3D scene graphs for locally consistent correspondence searching and global substructure-wise outlier pruning. Such a hierarchical process couples the feature retrieval and the correspondence extraction to resolve the substructure ambiguities by conducting a local-to-global consistency refinement. We demonstrate the capability of Outram in a variety of scenarios in multiple large-scale outdoor datasets. Our implementation is open-sourced: https://github.com/Pamphlett/Outram.
LIO-GVM: an Accurate, Tightly-Coupled Lidar-Inertial Odometry with Gaussian Voxel Map
Jun 30, 2023This letter presents an accurate and robust Lidar Inertial Odometry framework. We fuse LiDAR scans with IMU data using a tightly-coupled iterative error state Kalman filter for robust and fast localization. To achieve robust correspondence matching, we represent the points as a set of Gaussian distributions and evaluate the divergence in variance for outlier rejection. Based on the fitted distributions, a new residual metric is proposed for the filter-based Lidar inertial odometry, which demonstrates an improvement from merely quantifying distance to incorporating variance disparity, further enriching the comprehensiveness and accuracy of the residual metric. Due to the strategic design of the residual metric, we propose a simple yet effective voxel-solely mapping scheme, which only necessities the maintenance of one centroid and one covariance matrix for each voxel. Experiments on different datasets demonstrate the robustness and accuracy of our framework for various data inputs and environments. To the benefit of the robotics society, we open source the code at https://github.com/Ji1Xingyu/lio_gvm.
Multi-Modal Continual Test-Time Adaptation for 3D Semantic Segmentation
Mar 18, 2023



Continual Test-Time Adaptation (CTTA) generalizes conventional Test-Time Adaptation (TTA) by assuming that the target domain is dynamic over time rather than stationary. In this paper, we explore Multi-Modal Continual Test-Time Adaptation (MM-CTTA) as a new extension of CTTA for 3D semantic segmentation. The key to MM-CTTA is to adaptively attend to the reliable modality while avoiding catastrophic forgetting during continual domain shifts, which is out of the capability of previous TTA or CTTA methods. To fulfill this gap, we propose an MM-CTTA method called Continual Cross-Modal Adaptive Clustering (CoMAC) that addresses this task from two perspectives. On one hand, we propose an adaptive dual-stage mechanism to generate reliable cross-modal predictions by attending to the reliable modality based on the class-wise feature-centroid distance in the latent space. On the other hand, to perform test-time adaptation without catastrophic forgetting, we design class-wise momentum queues that capture confident target features for adaptation while stochastically restoring pseudo-source features to revisit source knowledge. We further introduce two new benchmarks to facilitate the exploration of MM-CTTA in the future. Our experimental results show that our method achieves state-of-the-art performance on both benchmarks.