 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReCCur: A Recursive Corner-Case Curation Framework for Robust Vision-Language Understanding in Open and Edge Scenarios
Jan 06, 2026Corner cases are rare or extreme scenarios that drive real-world failures, but they are difficult to curate at scale: web data are noisy, labels are brittle, and edge deployments preclude large retraining. We present ReCCur (Recursive Corner-Case Curation), a low-compute framework that converts noisy web imagery into auditable fine-grained labels via a multi-agent recursive pipeline. First, large-scale data acquisition and filtering expands a domain vocabulary with a vision-language model (VLM), crawls the web, and enforces tri-modal (image, description, keyword) consistency with light human spot checks to yield refined candidates. Next, mixture-of-experts knowledge distillation uses complementary encoders (e.g., CLIP, DINOv2, BEiT) for kNN voting with dual-confidence activation and uncertainty sampling, converging to a high-precision set. Finally, region-evidence VLM adversarial labeling pairs a proposer (multi-granularity regions and semantic cues) with a validator (global and local chained consistency) to produce explainable labels and close the loop. On realistic corner-case scenarios (e.g., flooded-car inspection), ReCCur runs on consumer-grade GPUs, steadily improves purity and separability, and requires minimal human supervision, providing a practical substrate for downstream training and evaluation under resource constraints. Code and dataset will be released.
QLIO: Quantized LiDAR-Inertial Odometry
Mar 11, 2025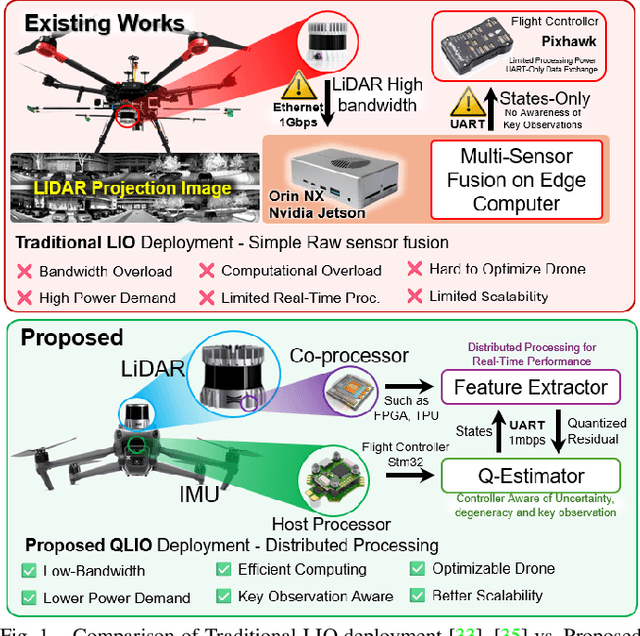
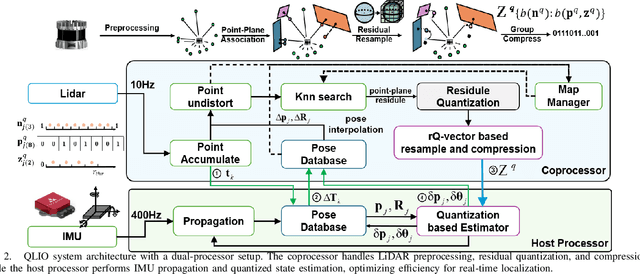
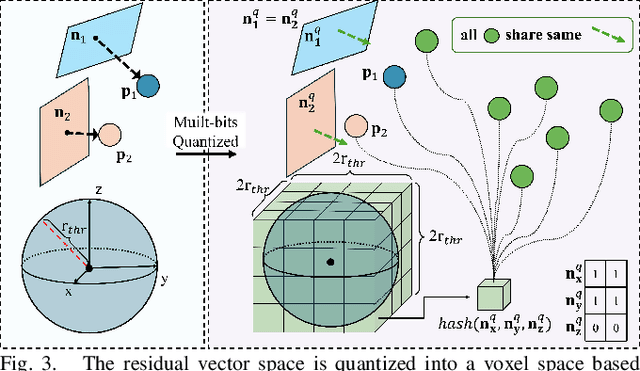
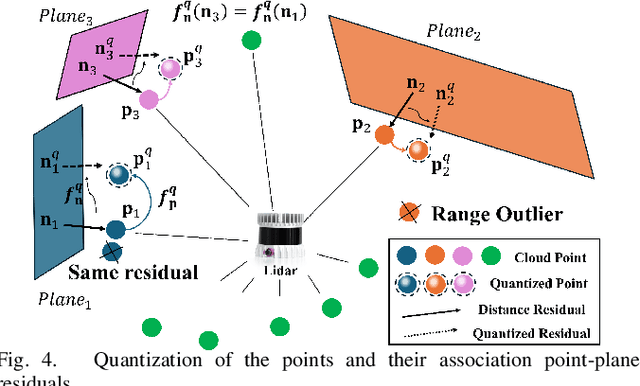
LiDAR-Inertial Odometry (LIO) is widely used for autonomous navigation, but its deployment on Size, Weight, and Power (SWaP)-constrained platforms remains challenging due to the computational cost of processing dense point clouds. Conventional LIO frameworks rely on a single onboard processor, leading to computational bottlenecks and high memory demands, making real-time execution difficult on embedded systems. To address this, we propose QLIO, a multi-processor distributed quantized LIO framework that reduces computational load and bandwidth consumption while maintaining localization accuracy. QLIO introduces a quantized state estimation pipeline, where a co-processor pre-processes LiDAR measurements, compressing point-to-plane residuals before transmitting only essential features to the host processor. Additionally, an rQ-vector-based adaptive resampling strategy intelligently selects and compresses key observations, further reducing computational redundancy. Real-world evaluations demonstrate that QLIO achieves a 14.1% reduction in per-observation residual data while preserving localization accuracy. Furthermore, we release an open-source implementation to facilitate further research and real-world deployment. These results establish QLIO as an efficient and scalable solution for real-time autonomous systems operating under computational and bandwidth constraints.
Large-Scale UWB Anchor Calibration and One-Shot Localization Using Gaussian Process
Dec 22, 2024



Ultra-wideband (UWB) is gaining popularity with devices like AirTags for precise home item localization but faces significant challenges when scaled to large environments like seaports. The main challenges are calibration and localization in obstructed conditions, which are common in logistics environments. Traditional calibration methods, dependent on line-of-sight (LoS), are slow, costly, and unreliable in seaports and warehouses, making large-scale localization a significant pain point in the industry. To overcome these challenges, we propose a UWB-LiDAR fusion-based calibration and one-shot localization framework. Our method uses Gaussian Processes to estimate anchor position from continuous-time LiDAR Inertial Odometry with sampled UWB ranges. This approach ensures accurate and reliable calibration with just one round of sampling in large-scale areas, I.e., 600x450 square meter. With the LoS issues, UWB-only localization can be problematic, even when anchor positions are known. We demonstrate that by applying a UWB-range filter, the search range for LiDAR loop closure descriptors is significantly reduced, improving both accuracy and speed. This concept can be applied to other loop closure detection methods, enabling cost-effective localization in large-scale warehouses and seaports. It significantly improves precision in challenging environments where UWB-only and LiDAR-Inertial methods fall short, as shown in the video \url{https://youtu.be/oY8jQKdM7lU }. We will open-source our datasets and calibration codes for community use.