 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReCCur: A Recursive Corner-Case Curation Framework for Robust Vision-Language Understanding in Open and Edge Scenarios
Jan 06, 2026Corner cases are rare or extreme scenarios that drive real-world failures, but they are difficult to curate at scale: web data are noisy, labels are brittle, and edge deployments preclude large retraining. We present ReCCur (Recursive Corner-Case Curation), a low-compute framework that converts noisy web imagery into auditable fine-grained labels via a multi-agent recursive pipeline. First, large-scale data acquisition and filtering expands a domain vocabulary with a vision-language model (VLM), crawls the web, and enforces tri-modal (image, description, keyword) consistency with light human spot checks to yield refined candidates. Next, mixture-of-experts knowledge distillation uses complementary encoders (e.g., CLIP, DINOv2, BEiT) for kNN voting with dual-confidence activation and uncertainty sampling, converging to a high-precision set. Finally, region-evidence VLM adversarial labeling pairs a proposer (multi-granularity regions and semantic cues) with a validator (global and local chained consistency) to produce explainable labels and close the loop. On realistic corner-case scenarios (e.g., flooded-car inspection), ReCCur runs on consumer-grade GPUs, steadily improves purity and separability, and requires minimal human supervision, providing a practical substrate for downstream training and evaluation under resource constraints. Code and dataset will be released.
QLIO: Quantized LiDAR-Inertial Odometry
Mar 11, 2025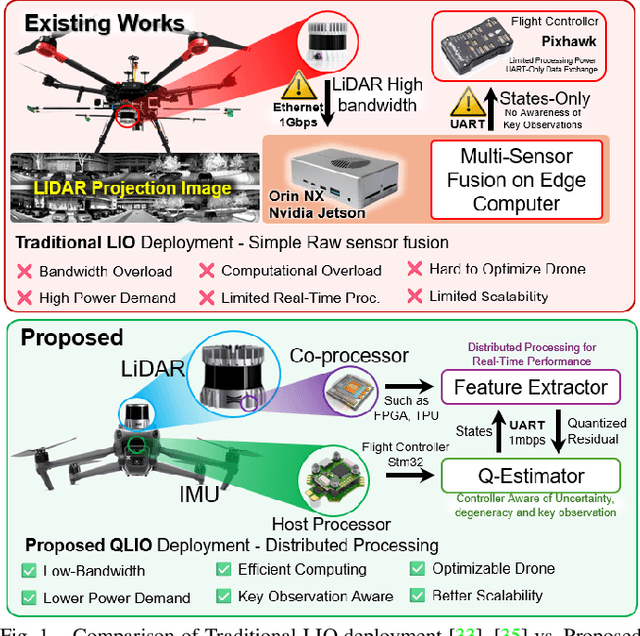
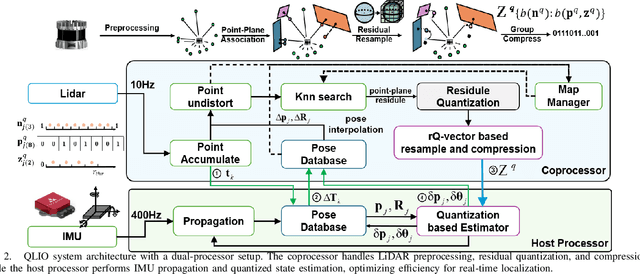
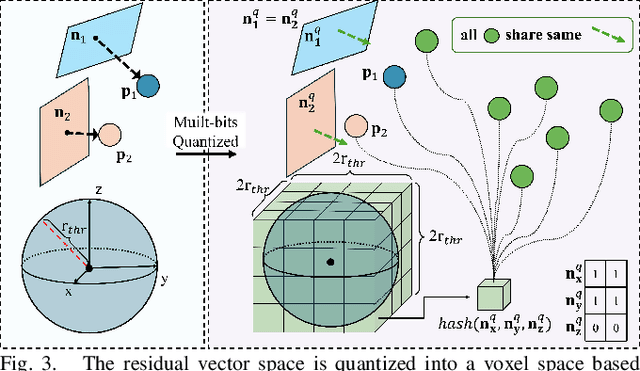
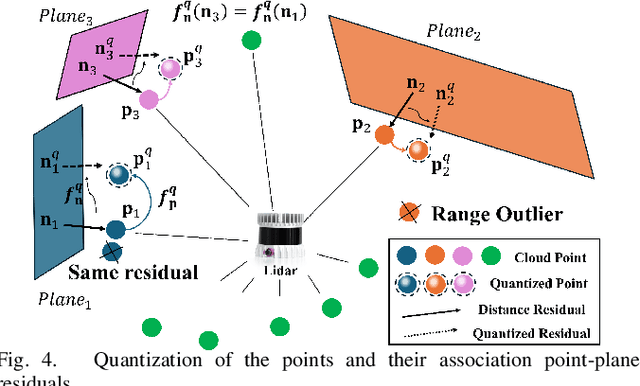
LiDAR-Inertial Odometry (LIO) is widely used for autonomous navigation, but its deployment on Size, Weight, and Power (SWaP)-constrained platforms remains challenging due to the computational cost of processing dense point clouds. Conventional LIO frameworks rely on a single onboard processor, leading to computational bottlenecks and high memory demands, making real-time execution difficult on embedded systems. To address this, we propose QLIO, a multi-processor distributed quantized LIO framework that reduces computational load and bandwidth consumption while maintaining localization accuracy. QLIO introduces a quantized state estimation pipeline, where a co-processor pre-processes LiDAR measurements, compressing point-to-plane residuals before transmitting only essential features to the host processor. Additionally, an rQ-vector-based adaptive resampling strategy intelligently selects and compresses key observations, further reducing computational redundancy. Real-world evaluations demonstrate that QLIO achieves a 14.1% reduction in per-observation residual data while preserving localization accuracy. Furthermore, we release an open-source implementation to facilitate further research and real-world deployment. These results establish QLIO as an efficient and scalable solution for real-time autonomous systems operating under computational and bandwidth constraints.