 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMCD: Diverse Large-Scale Multi-Campus Dataset for Robot Perception
Mar 18, 2024Perception plays a crucial role in various robot applications. However, existing well-annotated datasets are biased towards autonomous driving scenarios, while unlabelled SLAM datasets are quickly over-fitted, and often lack environment and domain variations. To expand the frontier of these fields, we introduce a comprehensive dataset named MCD (Multi-Campus Dataset), featuring a wide range of sensing modalities, high-accuracy ground truth, and diverse challenging environments across three Eurasian university campuses. MCD comprises both CCS (Classical Cylindrical Spinning) and NRE (Non-Repetitive Epicyclic) lidars, high-quality IMUs (Inertial Measurement Units), cameras, and UWB (Ultra-WideBand) sensors. Furthermore, in a pioneering effort, we introduce semantic annotations of 29 classes over 59k sparse NRE lidar scans across three domains, thus providing a novel challenge to existing semantic segmentation research upon this largely unexplored lidar modality. Finally, we propose, for the first time to the best of our knowledge, continuous-time ground truth based on optimization-based registration of lidar-inertial data on large survey-grade prior maps, which are also publicly released, each several times the size of existing ones. We conduct a rigorous evaluation of numerous state-of-the-art algorithms on MCD, report their performance, and highlight the challenges awaiting solutions from the research community.
Comparison of Varied 2D Mapping Approaches by Using Practice-Oriented Evaluation Criteria
Oct 19, 2022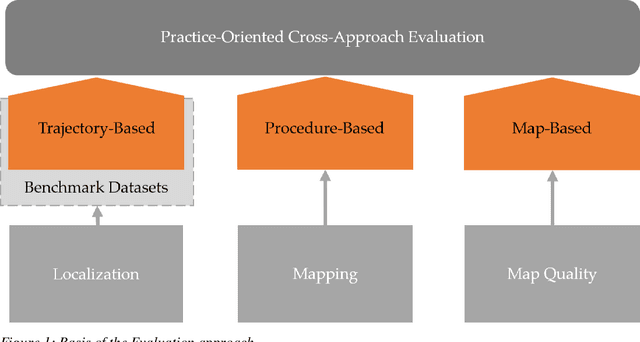

A key aspect of the precision of a mobile robots localization is the quality and aptness of the map it is using. A variety of mapping approaches are available that can be employed to create such maps with varying degrees of effort, hardware requirements and quality of the resulting maps. To create a better understanding of the applicability of these different approaches to specific applications, this paper evaluates and compares three different mapping approaches based on simultaneous localization and mapping, terrestrial laser scanning as well as publicly accessible building contours.