Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Varied 2D Mapping Approaches by Using Practice-Oriented Evaluation Criteria
Oct 19, 2022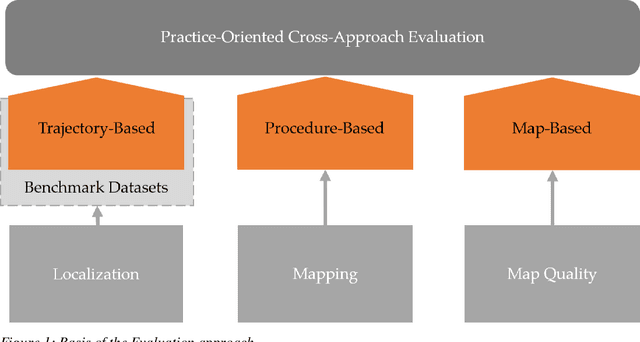

A key aspect of the precision of a mobile robots localization is the quality and aptness of the map it is using. A variety of mapping approaches are available that can be employed to create such maps with varying degrees of effort, hardware requirements and quality of the resulting maps. To create a better understanding of the applicability of these different approaches to specific applications, this paper evaluates and compares three different mapping approaches based on simultaneous localization and mapping, terrestrial laser scanning as well as publicly accessible building contours.
Via