 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Varied 2D Mapping Approaches by Using Practice-Oriented Evaluation Criteria
Oct 19, 2022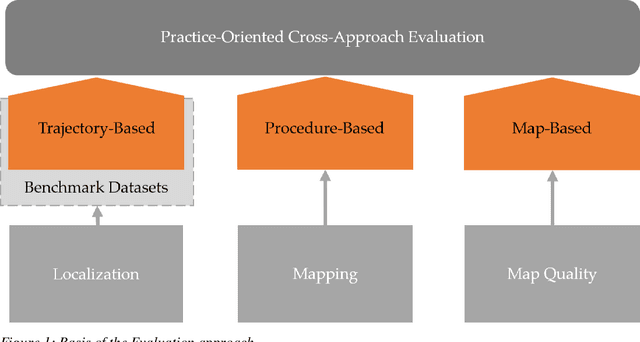
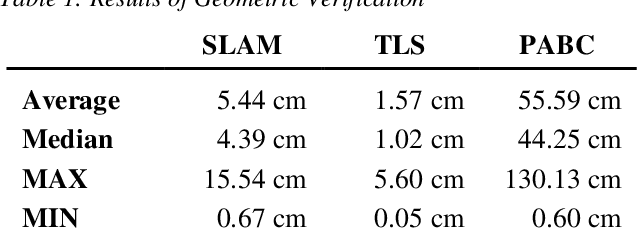

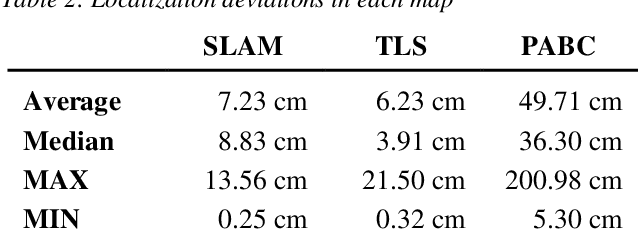
A key aspect of the precision of a mobile robots localization is the quality and aptness of the map it is using. A variety of mapping approaches are available that can be employed to create such maps with varying degrees of effort, hardware requirements and quality of the resulting maps. To create a better understanding of the applicability of these different approaches to specific applications, this paper evaluates and compares three different mapping approaches based on simultaneous localization and mapping, terrestrial laser scanning as well as publicly accessible building contours.
Estimating the Pose of a Euro Pallet with an RGB Camera based on Synthetic Training Data
Oct 12, 2022


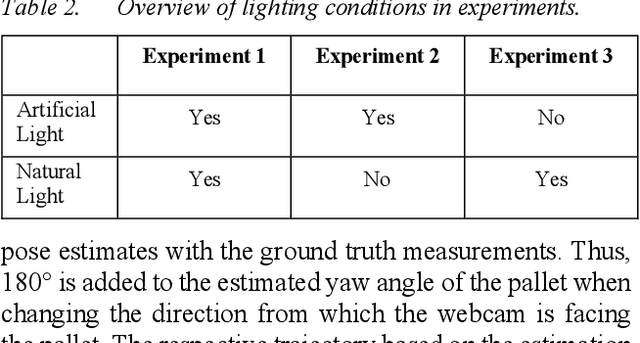
Estimating the pose of a pallet and other logistics objects is crucial for various use cases, such as automatized material handling or tracking. Innovations in computer vision, computing power, and machine learning open up new opportunities for device-free localization based on cameras and neural networks. Large image datasets with annotated poses are required for training the network. Manual annotation, especially of 6D poses, is an extremely labor-intensive process. Hence, newer approaches often leverage synthetic training data to automatize the process of generating annotated image datasets. In this work, the generation of synthetic training data for 6D pose estimation of pallets is presented. The data is then used to train the Deep Object Pose Estimation (DOPE) algorithm. The experimental validation of the algorithm proves that the 6D pose estimation of a standardized Euro pallet with a Red-Green-Blue (RGB) camera is feasible. The comparison of the results from three varying datasets under different lighting conditions shows the relevance of an appropriate dataset design to achieve an accurate and robust localization. The quantitative evaluation shows an average position error of less than 20 cm for the preferred dataset. The validated training dataset and a photorealistic model of a Euro pallet are publicly provided.
Decision Trees for Analyzing Influences on the Accuracy of Indoor Localization Systems
Jul 08, 2022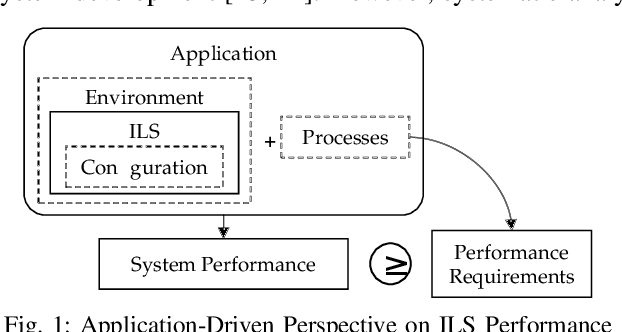
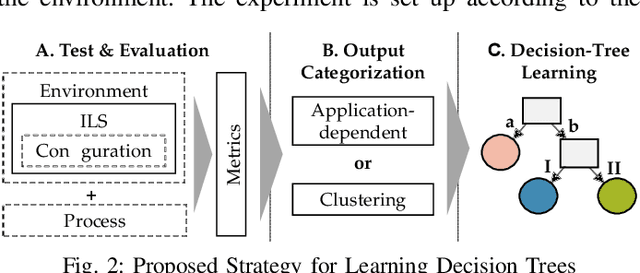
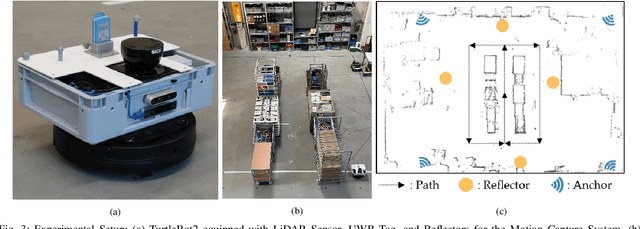
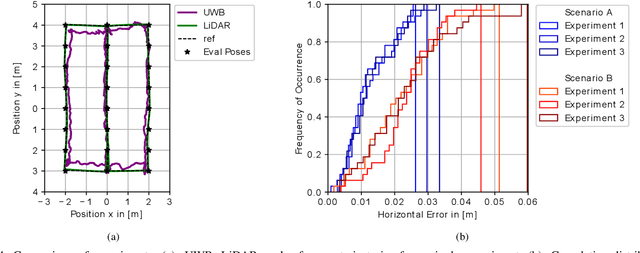
Absolute position accuracy is the key performance criterion of an Indoor Localization System (ILS). Since ILS are heterogeneous and complex cyber-physical systems, the localization accuracy depends on various influences from the environment, system configuration, and the application processes. To determine the position accuracy of a system in a reproducible, comparable, and realistic manner, these factors must be taken into account. We propose a strategy for analyzing the influences on the position accuracy of ILS using decision trees in combination with application-related or technology-related categorization. The proposed strategy is validated using empirical data from 120 experiments. The accuracy of an Ultra-Wideband and a LiDAR-based ILS was determined under different application-driven influencing factors, considering the application of autonomous mobile robots in warehouses. Finally, the opportunities and limitations of analyzing decision trees to compare system performance, find a suitable system, optimize the environment or system configuration, and understand the relevance of different influencing factors are presented.
Analysis of the Operation of Industrial Trucks based on Position Data
Dec 15, 2021



Indoor positioning systems (IPSs) can make an important contribution to the analysis and optimization of internal transport processes. The overall aim of this work is to examine how position data can be used to analyze the operation of industrial trucks in warehouses. This is achieved by developing a concept for the analysis of industrial truck operations based merely on position data. The concept consists of a signal processing scheme to derive kinematic data and three analysis methods - Monitoring, Area analysis, and Motion analysis. Schemes for the signal processing and detection of motion events were developed and implemented as part of the TrOpLocerApp (Truck Operation Localization Analyzer-Application) for recording, displaying, and processing position data, according to the proposed system concept. The TrOpLocer-App source code is published on GitLab. Different filter algorithms were examined, as part of the signal processing scheme, from which the low pass Butterworth filter has shown the best results in static experiments. Validation of the motion detection scheme shows good detection quality for distinct events in a realistic movement experiment.