 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision Trees for Analyzing Influences on the Accuracy of Indoor Localization Systems
Paper and Code
Jul 08, 2022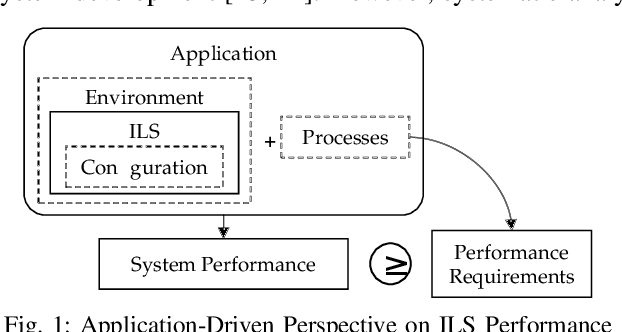
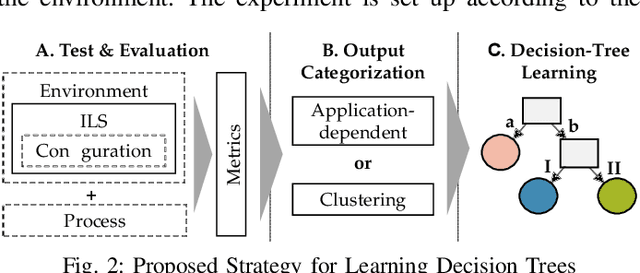
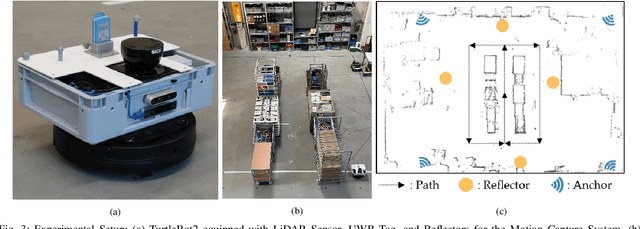
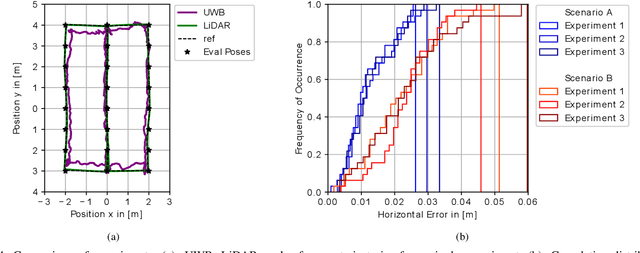
Absolute position accuracy is the key performance criterion of an Indoor Localization System (ILS). Since ILS are heterogeneous and complex cyber-physical systems, the localization accuracy depends on various influences from the environment, system configuration, and the application processes. To determine the position accuracy of a system in a reproducible, comparable, and realistic manner, these factors must be taken into account. We propose a strategy for analyzing the influences on the position accuracy of ILS using decision trees in combination with application-related or technology-related categorization. The proposed strategy is validated using empirical data from 120 experiments. The accuracy of an Ultra-Wideband and a LiDAR-based ILS was determined under different application-driven influencing factors, considering the application of autonomous mobile robots in warehouses. Finally, the opportunities and limitations of analyzing decision trees to compare system performance, find a suitable system, optimize the environment or system configuration, and understand the relevance of different influencing factors are presented.