 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrectNav: Self-Correction Flywheel Empowers Vision-Language-Action Navigation Model
Aug 14, 2025Existing vision-and-language navigation models often deviate from the correct trajectory when executing instructions. However, these models lack effective error correction capability, hindering their recovery from errors. To address this challenge, we propose Self-correction Flywheel, a novel post-training paradigm. Instead of considering the model's error trajectories on the training set as a drawback, our paradigm emphasizes their significance as a valuable data source. We have developed a method to identify deviations in these error trajectories and devised innovative techniques to automatically generate self-correction data for perception and action. These self-correction data serve as fuel to power the model's continued training. The brilliance of our paradigm is revealed when we re-evaluate the model on the training set, uncovering new error trajectories. At this time, the self-correction flywheel begins to spin. Through multiple flywheel iterations, we progressively enhance our monocular RGB-based VLA navigation model CorrectNav. Experiments on R2R-CE and RxR-CE benchmarks show CorrectNav achieves new state-of-the-art success rates of 65.1% and 69.3%, surpassing prior best VLA navigation models by 8.2% and 16.4%. Real robot tests in various indoor and outdoor environments demonstrate \method's superior capability of error correction, dynamic obstacle avoidance, and long instruction following.
Multi-Robot Reliable Navigation in Uncertain Topological Environments with Graph Attention Networks
Nov 25, 2024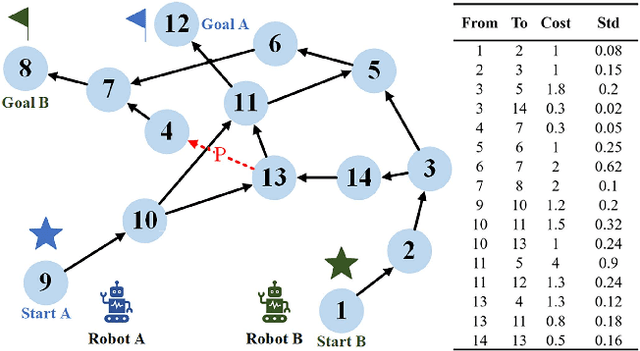
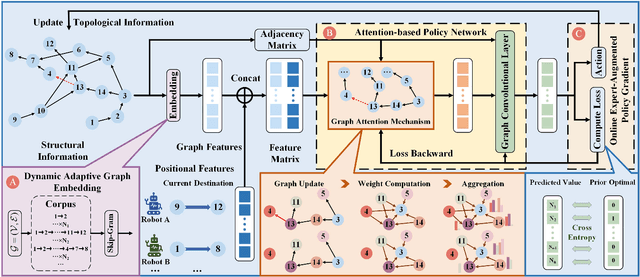
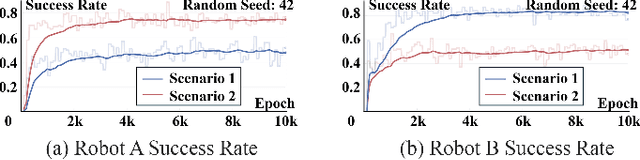
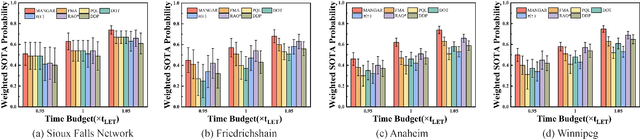
This paper studies the multi-robot reliable navigation problem in uncertain topological networks, which aims at maximizing the robot team's on-time arrival probabilities in the face of road network uncertainties. The uncertainty in these networks stems from the unknown edge traversability, which is only revealed to the robot upon its arrival at the edge's starting node. Existing approaches often struggle to adapt to real-time network topology changes, making them unsuitable for varying topological environments. To address the challenge, we reformulate the problem into a Partially Observable Markov Decision Process (POMDP) framework and introduce the Dynamic Adaptive Graph Embedding method to capture the evolving nature of the navigation task. We further enhance each robot's policy learning process by integrating deep reinforcement learning with Graph Attention Networks (GATs), leveraging self-attention to focus on critical graph features. The proposed approach, namely Multi-Agent Routing in Variable Environments with Learning (MARVEL) employs the generalized policy gradient algorithm to optimize the robots' real-time decision-making process iteratively. We compare the performance of MARVEL with state-of-the-art reliable navigation algorithms as well as Canadian traveller problem solutions in a range of canonical transportation networks, demonstrating improved adaptability and performance in uncertain topological networks. Additionally, real-world experiments with two robots navigating within a self-constructed indoor environment with uncertain topological structures demonstrate MARVEL's practicality.