 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Generalized Voronoi Graph based Coverage Control Approach for Non-Convex Environment
Mar 10, 2026To address the challenge of efficient coverage by multi-robot systems in non-convex regions with multiple obstacles, this paper proposes a coverage control method based on the Generalized Voronoi Graph (GVG), which has two phases: Load-Balancing Algorithm phase and Collaborative Coverage phase. In Load-Balancing Algorithm phase, the non-convex region is partitioned into multiple sub-regions based on GVG. Besides, a weighted load-balancing algorithm is developed, which considers the quality differences among sub-regions. By iteratively optimizing the robot allocation ratio, the number of robots in each sub-region is matched with the sub-region quality to achieve load balance. In Collaborative Coverage phase, each robot is controlled by a new controller to effectively coverage the region. The convergence of the method is proved and its performance is evaluated through simulations.
Relation DETR: Exploring Explicit Position Relation Prior for Object Detection
Jul 16, 2024This paper presents a general scheme for enhancing the convergence and performance of DETR (DEtection TRansformer). We investigate the slow convergence problem in transformers from a new perspective, suggesting that it arises from the self-attention that introduces no structural bias over inputs. To address this issue, we explore incorporating position relation prior as attention bias to augment object detection, following the verification of its statistical significance using a proposed quantitative macroscopic correlation (MC) metric. Our approach, termed Relation-DETR, introduces an encoder to construct position relation embeddings for progressive attention refinement, which further extends the traditional streaming pipeline of DETR into a contrastive relation pipeline to address the conflicts between non-duplicate predictions and positive supervision. Extensive experiments on both generic and task-specific datasets demonstrate the effectiveness of our approach. Under the same configurations, Relation-DETR achieves a significant improvement (+2.0% AP compared to DINO), state-of-the-art performance (51.7% AP for 1x and 52.1% AP for 2x settings), and a remarkably faster convergence speed (over 40% AP with only 2 training epochs) than existing DETR detectors on COCO val2017. Moreover, the proposed relation encoder serves as a universal plug-in-and-play component, bringing clear improvements for theoretically any DETR-like methods. Furthermore, we introduce a class-agnostic detection dataset, SA-Det-100k. The experimental results on the dataset illustrate that the proposed explicit position relation achieves a clear improvement of 1.3% AP, highlighting its potential towards universal object detection. The code and dataset are available at https://github.com/xiuqhou/Relation-DETR.
Cooperative Reward Shaping for Multi-Agent Pathfinding
Jul 15, 2024The primary objective of Multi-Agent Pathfinding (MAPF) is to plan efficient and conflict-free paths for all agents. Traditional multi-agent path planning algorithms struggle to achieve efficient distributed path planning for multiple agents. In contrast, Multi-Agent Reinforcement Learning (MARL) has been demonstrated as an effective approach to achieve this objective. By modeling the MAPF problem as a MARL problem, agents can achieve efficient path planning and collision avoidance through distributed strategies under partial observation. However, MARL strategies often lack cooperation among agents due to the absence of global information, which subsequently leads to reduced MAPF efficiency. To address this challenge, this letter introduces a unique reward shaping technique based on Independent Q-Learning (IQL). The aim of this method is to evaluate the influence of one agent on its neighbors and integrate such an interaction into the reward function, leading to active cooperation among agents. This reward shaping method facilitates cooperation among agents while operating in a distributed manner. The proposed approach has been evaluated through experiments across various scenarios with different scales and agent counts. The results are compared with those from other state-of-the-art (SOTA) planners. The evidence suggests that the approach proposed in this letter parallels other planners in numerous aspects, and outperforms them in scenarios featuring a large number of agents.
Salience DETR: Enhancing Detection Transformer with Hierarchical Salience Filtering Refinement
Mar 24, 2024



DETR-like methods have significantly increased detection performance in an end-to-end manner. The mainstream two-stage frameworks of them perform dense self-attention and select a fraction of queries for sparse cross-attention, which is proven effective for improving performance but also introduces a heavy computational burden and high dependence on stable query selection. This paper demonstrates that suboptimal two-stage selection strategies result in scale bias and redundancy due to the mismatch between selected queries and objects in two-stage initialization. To address these issues, we propose hierarchical salience filtering refinement, which performs transformer encoding only on filtered discriminative queries, for a better trade-off between computational efficiency and precision. The filtering process overcomes scale bias through a novel scale-independent salience supervision. To compensate for the semantic misalignment among queries, we introduce elaborate query refinement modules for stable two-stage initialization. Based on above improvements, the proposed Salience DETR achieves significant improvements of +4.0% AP, +0.2% AP, +4.4% AP on three challenging task-specific detection datasets, as well as 49.2% AP on COCO 2017 with less FLOPs. The code is available at https://github.com/xiuqhou/Salience-DETR.
Five-Tiered Route Planner for Multi-AUV Accessing Fixed Nodes in Uncertain Ocean Environments
Nov 11, 2023This article introduces a five-tiered route planner for accessing multiple nodes with multiple autonomous underwater vehicles (AUVs) that enables efficient task completion in stochastic ocean environments. First, the pre-planning tier solves the single-AUV routing problem to find the optimal giant route (GR), estimates the number of required AUVs based on GR segmentation, and allocates nodes for each AUV to access. Second, the route planning tier plans individual routes for each AUV. During navigation, the path planning tier provides each AUV with physical paths between any two points, while the actuation tier is responsible for path tracking and obstacle avoidance. Finally, in the stochastic ocean environment, deviations from the initial plan may occur, thus, an auction-based coordination tier drives online task coordination among AUVs in a distributed manner. Simulation experiments are conducted in multiple different scenarios to test the performance of the proposed planner, and the promising results show that the proposed method reduces AUV usage by 7.5% compared with the existing methods. When using the same number of AUVs, the fleet equipped with the proposed planner achieves a 6.2% improvement in average task completion rate.
Resource-Efficient Cooperative Online Scalar Field Mapping via Distributed Sparse Gaussian Process Regression
Sep 28, 2023Cooperative online scalar field mapping is an important task for multi-robot systems. Gaussian process regression is widely used to construct a map that represents spatial information with confidence intervals. However, it is difficult to handle cooperative online mapping tasks because of its high computation and communication costs. This letter proposes a resource-efficient cooperative online field mapping method via distributed sparse Gaussian process regression. A novel distributed online Gaussian process evaluation method is developed such that robots can cooperatively evaluate and find observations of sufficient global utility to reduce computation. The bounded errors of distributed aggregation results are guaranteed theoretically, and the performances of the proposed algorithms are validated by real online light field mapping experiments.
CARE: Confidence-rich Autonomous Robot Exploration using Bayesian Kernel Inference and Optimization
Sep 11, 2023



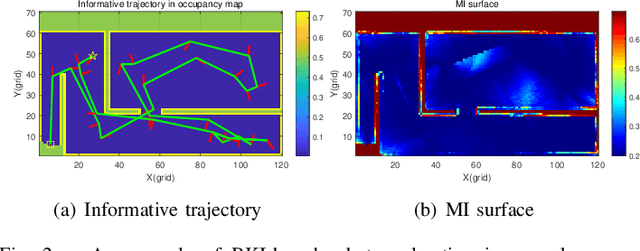
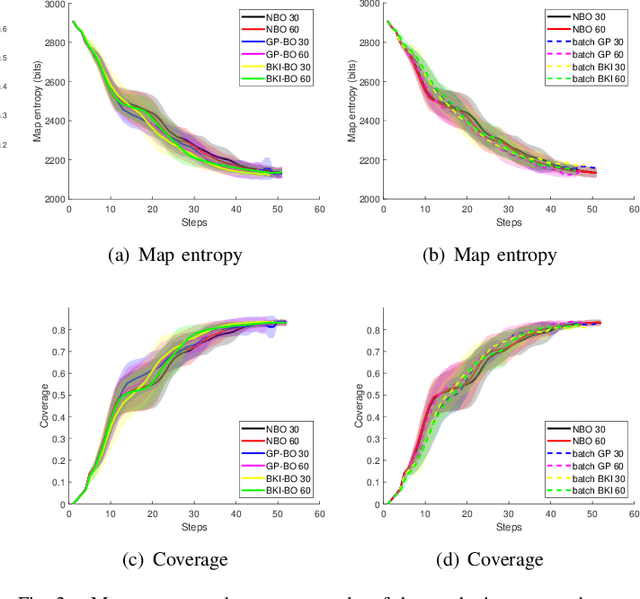
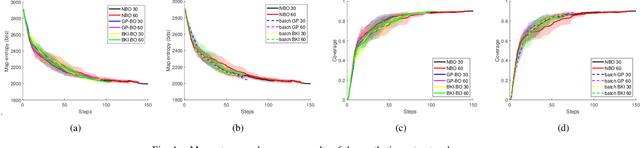
In this paper, we consider improving the efficiency of information-based autonomous robot exploration in unknown and complex environments. We first utilize Gaussian process (GP) regression to learn a surrogate model to infer the confidence-rich mutual information (CRMI) of querying control actions, then adopt an objective function consisting of predicted CRMI values and prediction uncertainties to conduct Bayesian optimization (BO), i.e., GP-based BO (GPBO). The trade-off between the best action with the highest CRMI value (exploitation) and the action with high prediction variance (exploration) can be realized. To further improve the efficiency of GPBO, we propose a novel lightweight information gain inference method based on Bayesian kernel inference and optimization (BKIO), achieving an approximate logarithmic complexity without the need for training. BKIO can also infer the CRMI and generate the best action using BO with bounded cumulative regret, which ensures its comparable accuracy to GPBO with much higher efficiency. Extensive numerical and real-world experiments show the desired efficiency of our proposed methods without losing exploration performance in different unstructured, cluttered environments. We also provide our open-source implementation code at https://github.com/Shepherd-Gregory/BKIO-Exploration.
* Full version for the paper accepted by IEEE Robotics and Automation Letters (RA-L) 2023. arXiv admin note: text overlap with arXiv:2301.00523
Physics-informed Neural Network Combined with Characteristic-Based Split for Solving Navier-Stokes Equations
Apr 21, 2023In this paper, physics-informed neural network (PINN) based on characteristic-based split (CBS) is proposed, which can be used to solve the time-dependent Navier-Stokes equations (N-S equations). In this method, The output parameters and corresponding losses are separated, so the weights between output parameters are not considered. Not all partial derivatives participate in gradient backpropagation, and the remaining terms will be reused.Therefore, compared with traditional PINN, this method is a rapid version. Here, labeled data, physical constraints and network outputs are regarded as priori information, and the residuals of the N-S equations are regarded as posteriori information. So this method can deal with both data-driven and data-free problems. As a result, it can solve the special form of compressible N-S equations -- -Shallow-Water equations, and incompressible N-S equations. As boundary conditions are known, this method only needs the flow field information at a certain time to restore the past and future flow field information. We solve the progress of a solitary wave onto a shelving beach and the dispersion of the hot water in the flow, which show this method's potential in the marine engineering. We also use incompressible equations with exact solutions to prove this method's correctness and universality. We find that PINN needs more strict boundary conditions to solve the N-S equation, because it has no computational boundary compared with the finite element method.
Bayesian Generalized Kernel Inference for Exploration of Autonomous Robots
Jan 02, 2023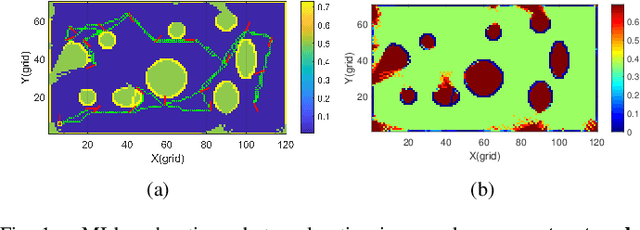
This paper concerns realizing highly efficient information-theoretic robot exploration with desired performance in complex scenes. We build a continuous lightweight inference model to predict the mutual information (MI) and the associated prediction confidence of the robot's candidate actions which have not been evaluated explicitly. This allows the decision-making stage in robot exploration to run with a logarithmic complexity approximately, this will also benefit online exploration in large unstructured, and cluttered places that need more spatial samples to assess and decide. We also develop an objective function to balance the local optimal action with the highest MI value and the global choice with high prediction variance. Extensive numerical and dataset simulations show the desired efficiency of our proposed method without losing exploration performance in different environments. We also provide our open-source implementation codes released on GitHub for the robot community.
Confidence-rich Localization and Mapping based on Particle Filter for Robotic Exploration
Mar 07, 2022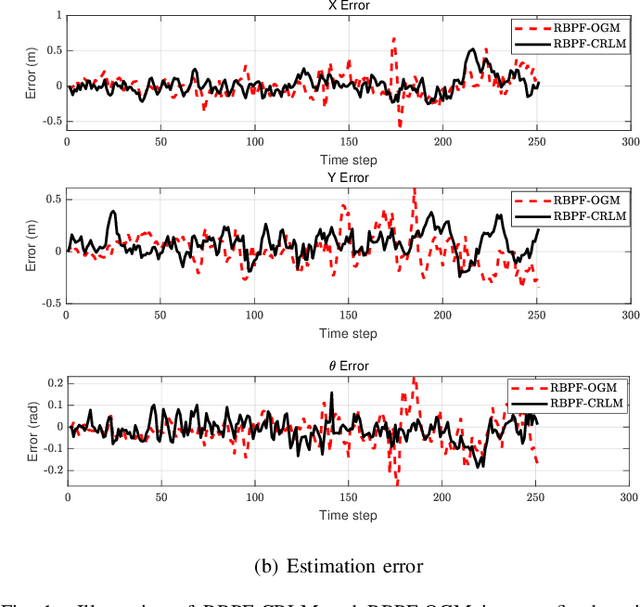
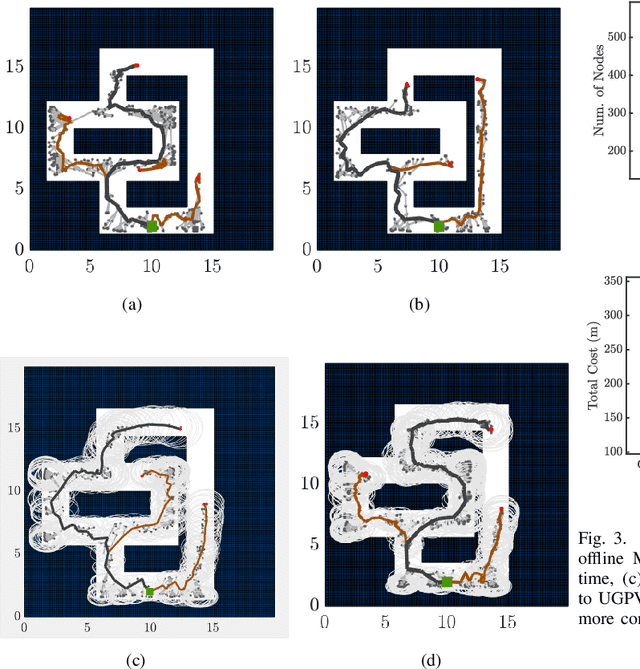
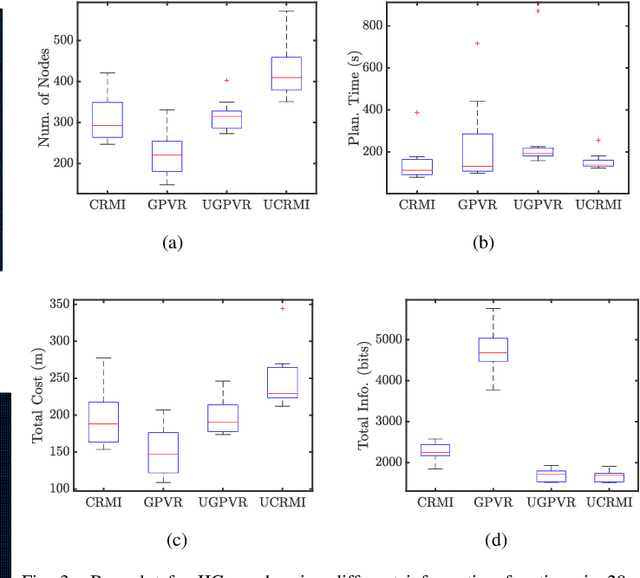
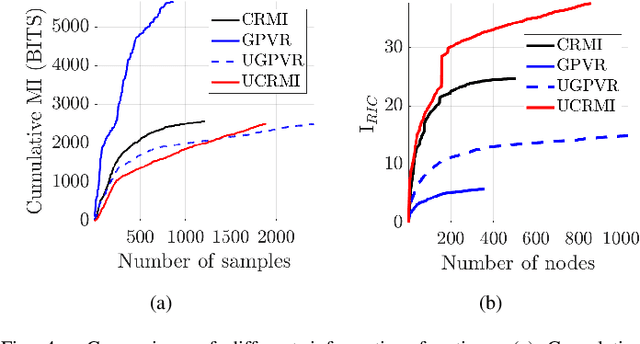
This paper mainly studies the localization and mapping of range sensing robots in the confidence-rich map (CRM), a dense environmental representation with continuous belief, and then extends to information-theoretic exploration to reduce the pose uncertainty. Most previous works about active simultaneous localization and mapping (SLAM) and exploration always assumed the known robot poses or utilized inaccurate information metrics to approximate pose uncertainty, resulting in imbalanced exploration performance and efficiency in the unknown environment. This inspires us to extend the confidence-rich mutual information (CRMI) with measurable pose uncertainty. Specifically, we propose a Rao-Blackwellized particle filter-based localization and mapping scheme (RBPF-CLAM) for CRMs, then we develop a new closed-form weighting method to improve the localization accuracy without scan matching. We further compute the uncertain CRMI (UCRMI) with the weighted particles by a more accurate approximation. Simulations and experimental evaluations show the localization accuracy and exploration performance of the proposed methods in unstructured and confined scenes.