 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCleanUpBench: Embodied Sweeping and Grasping Benchmark
Aug 07, 2025Embodied AI benchmarks have advanced navigation, manipulation, and reasoning, but most target complex humanoid agents or large-scale simulations that are far from real-world deployment. In contrast, mobile cleaning robots with dual mode capabilities, such as sweeping and grasping, are rapidly emerging as realistic and commercially viable platforms. However, no benchmark currently exists that systematically evaluates these agents in structured, multi-target cleaning tasks, revealing a critical gap between academic research and real-world applications. We introduce CleanUpBench, a reproducible and extensible benchmark for evaluating embodied agents in realistic indoor cleaning scenarios. Built on NVIDIA Isaac Sim, CleanUpBench simulates a mobile service robot equipped with a sweeping mechanism and a six-degree-of-freedom robotic arm, enabling interaction with heterogeneous objects. The benchmark includes manually designed environments and one procedurally generated layout to assess generalization, along with a comprehensive evaluation suite covering task completion, spatial efficiency, motion quality, and control performance. To support comparative studies, we provide baseline agents based on heuristic strategies and map-based planning. CleanUpBench bridges the gap between low-level skill evaluation and full-scene testing, offering a scalable testbed for grounded, embodied intelligence in everyday settings.
Following Is All You Need: Robot Crowd Navigation Using People As Planners
Apr 15, 2025Navigating in crowded environments requires the robot to be equipped with high-level reasoning and planning techniques. Existing works focus on developing complex and heavyweight planners while ignoring the role of human intelligence. Since humans are highly capable agents who are also widely available in a crowd navigation setting, we propose an alternative scheme where the robot utilises people as planners to benefit from their effective planning decisions and social behaviours. Through a set of rule-based evaluations, we identify suitable human leaders who exhibit the potential to guide the robot towards its goal. Using a simple base planner, the robot follows the selected leader through shorthorizon subgoals that are designed to be straightforward to achieve. We demonstrate through both simulated and real-world experiments that our novel framework generates safe and efficient robot plans compared to existing planners, even without predictive or data-driven modules. Our method also brings human-like robot behaviours without explicitly defining traffic rules and social norms. Code will be available at https://github.com/centiLinda/PeopleAsPlanner.git.
AToM: Adaptive Theory-of-Mind-Based Human Motion Prediction in Long-Term Human-Robot Interactions
Feb 09, 2025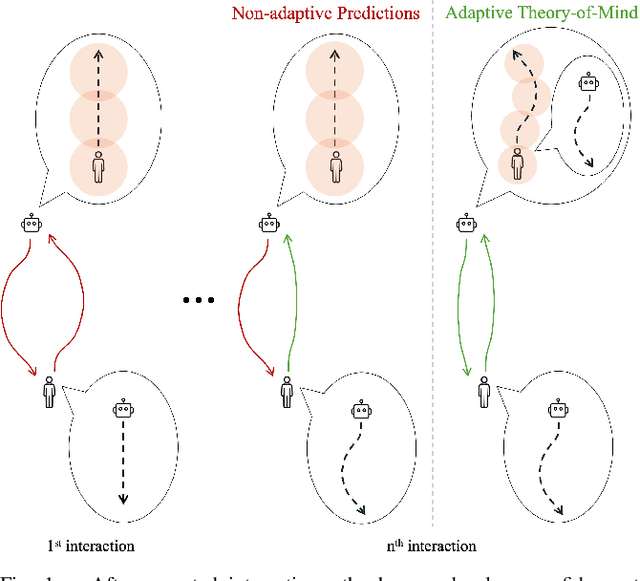
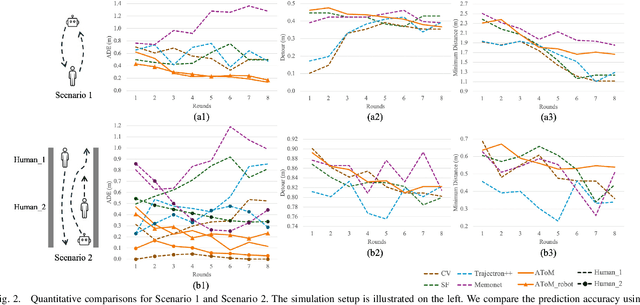
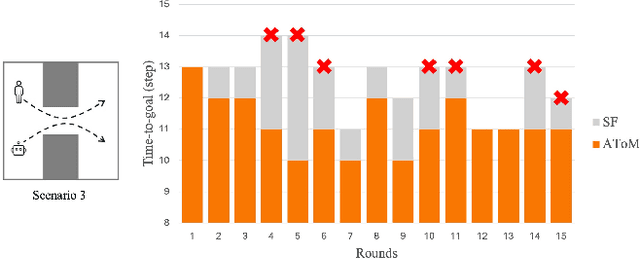
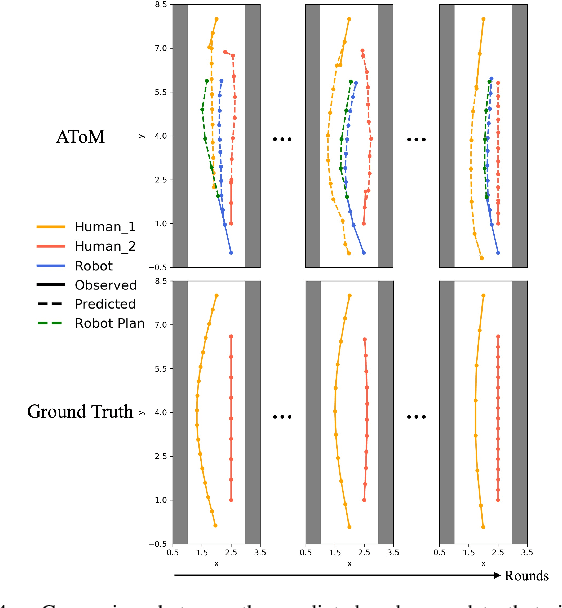
Humans learn from observations and experiences to adjust their behaviours towards better performance. Interacting with such dynamic humans is challenging, as the robot needs to predict the humans accurately for safe and efficient operations. Long-term interactions with dynamic humans have not been extensively studied by prior works. We propose an adaptive human prediction model based on the Theory-of-Mind (ToM), a fundamental social-cognitive ability that enables humans to infer others' behaviours and intentions. We formulate the human internal belief about others using a game-theoretic model, which predicts the future motions of all agents in a navigation scenario. To estimate an evolving belief, we use an Unscented Kalman Filter to update the behavioural parameters in the human internal model. Our formulation provides unique interpretability to dynamic human behaviours by inferring how the human predicts the robot. We demonstrate through long-term experiments in both simulations and real-world settings that our prediction effectively promotes safety and efficiency in downstream robot planning. Code will be available at https://github.com/centiLinda/AToM-human-prediction.git.
Swept Volume-Aware Trajectory Planning and MPC Tracking for Multi-Axle Swerve-Drive AMRs
Dec 22, 2024



Multi-axle autonomous mobile robots (AMRs) are set to revolutionize the future of robotics in logistics. As the backbone of next-generation solutions, these robots face a critical challenge: managing and minimizing the swept volume during turns while maintaining precise control. Traditional systems designed for standard vehicles often struggle with the complex dynamics of multi-axle configurations, leading to inefficiency and increased safety risk in confined spaces. Our innovative framework overcomes these limitations by combining swept volume minimization with Signed Distance Field (SDF) path planning and model predictive control (MPC) for independent wheel steering. This approach not only plans paths with an awareness of the swept volume but actively minimizes it in real-time, allowing each axle to follow a precise trajectory while significantly reducing the space the vehicle occupies. By predicting future states and adjusting the turning radius of each wheel, our method enhances both maneuverability and safety, even in the most constrained environments. Unlike previous works, our solution goes beyond basic path calculation and tracking, offering real-time path optimization with minimal swept volume and efficient individual axle control. To our knowledge, this is the first comprehensive approach to tackle these challenges, delivering life-saving improvements in control, efficiency, and safety for multi-axle AMRs. Furthermore, we will open-source our work to foster collaboration and enable others to advance safer, more efficient autonomous systems.