 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelationship-Aware Hierarchical 3D Scene Graph for Task Reasoning
Feb 02, 2026Representing and understanding 3D environments in a structured manner is crucial for autonomous agents to navigate and reason about their surroundings. While traditional Simultaneous Localization and Mapping (SLAM) methods generate metric reconstructions and can be extended to metric-semantic mapping, they lack a higher level of abstraction and relational reasoning. To address this gap, 3D scene graphs have emerged as a powerful representation for capturing hierarchical structures and object relationships. In this work, we propose an enhanced hierarchical 3D scene graph that integrates open-vocabulary features across multiple abstraction levels and supports object-relational reasoning. Our approach leverages a Vision Language Model (VLM) to infer semantic relationships. Notably, we introduce a task reasoning module that combines Large Language Models (LLM) and a VLM to interpret the scene graph's semantic and relational information, enabling agents to reason about tasks and interact with their environment more intelligently. We validate our method by deploying it on a quadruped robot in multiple environments and tasks, highlighting its ability to reason about them.
Collaborative Exploration with a Marsupial Ground-Aerial Robot Team through Task-Driven Map Compression
Sep 09, 2025

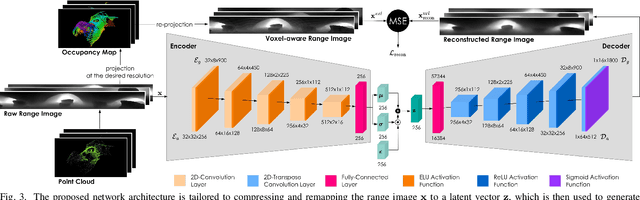

Efficient exploration of unknown environments is crucial for autonomous robots, especially in confined and large-scale scenarios with limited communication. To address this challenge, we propose a collaborative exploration framework for a marsupial ground-aerial robot team that leverages the complementary capabilities of both platforms. The framework employs a graph-based path planning algorithm to guide exploration and deploy the aerial robot in areas where its expected gain significantly exceeds that of the ground robot, such as large open spaces or regions inaccessible to the ground platform, thereby maximizing coverage and efficiency. To facilitate large-scale spatial information sharing, we introduce a bandwidth-efficient, task-driven map compression strategy. This method enables each robot to reconstruct resolution-specific volumetric maps while preserving exploration-critical details, even at high compression rates. By selectively compressing and sharing key data, communication overhead is minimized, ensuring effective map integration for collaborative path planning. Simulation and real-world experiments validate the proposed approach, demonstrating its effectiveness in improving exploration efficiency while significantly reducing data transmission.
Cooperative Aerial Robot Inspection Challenge: A Benchmark for Heterogeneous Multi-UAV Planning and Lessons Learned
Jan 14, 2025



We propose the Cooperative Aerial Robot Inspection Challenge (CARIC), a simulation-based benchmark for motion planning algorithms in heterogeneous multi-UAV systems. CARIC features UAV teams with complementary sensors, realistic constraints, and evaluation metrics prioritizing inspection quality and efficiency. It offers a ready-to-use perception-control software stack and diverse scenarios to support the development and evaluation of task allocation and motion planning algorithms. Competitions using CARIC were held at IEEE CDC 2023 and the IROS 2024 Workshop on Multi-Robot Perception and Navigation, attracting innovative solutions from research teams worldwide. This paper examines the top three teams from CDC 2023, analyzing their exploration, inspection, and task allocation strategies while drawing insights into their performance across scenarios. The results highlight the task's complexity and suggest promising directions for future research in cooperative multi-UAV systems.
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Apr 18, 2024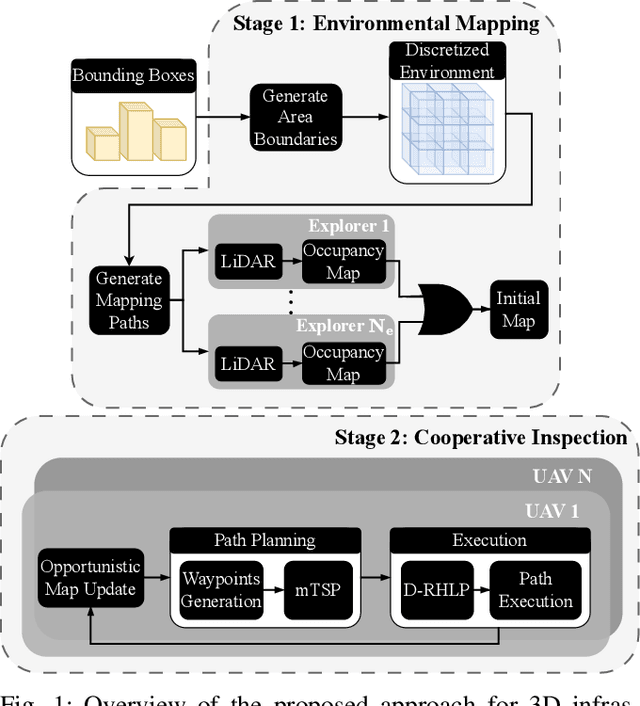
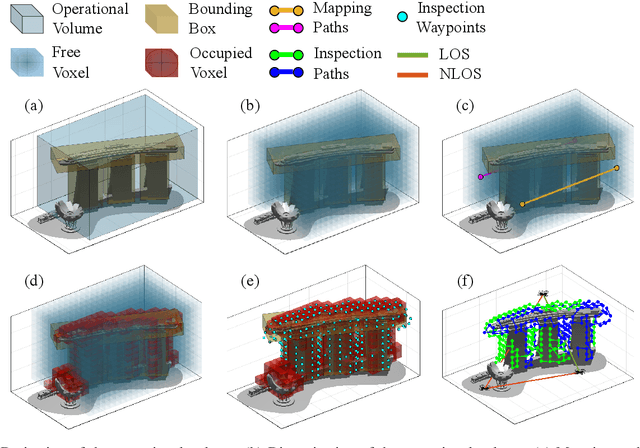
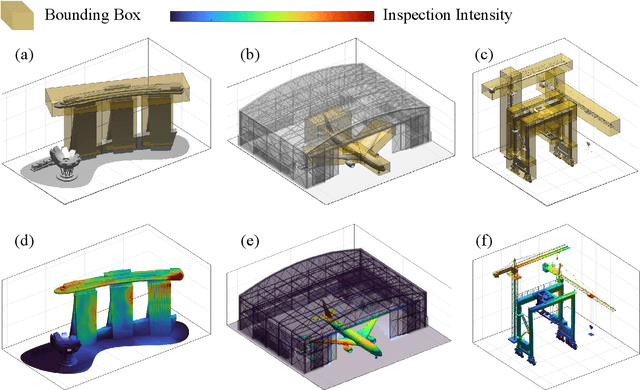
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.