 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Country Learning for National Infectious Disease Forecasting Using European Data
Jan 28, 2026Accurate forecasting of infectious disease incidence is critical for public health planning and timely intervention. While most data-driven forecasting approaches rely primarily on historical data from a single country, such data are often limited in length and variability, restricting the performance of machine learning (ML) models. In this work, we investigate a cross-country learning approach for infectious disease forecasting, in which a single model is trained on time series data from multiple countries and evaluated on a country of interest. This setting enables the model to exploit shared epidemic dynamics across countries and to benefit from an enlarged training set. We examine this approach through a case study on COVID-19 case forecasting in Cyprus, using surveillance data from European countries. We evaluate multiple ML models and analyse the impact of the lookback window length and cross-country `data augmentation' on multi-step forecasting performance. Our results show that incorporating data from other countries can lead to consistent improvements over models trained solely on national data. Although the empirical focus is on Cyprus and COVID-19, the proposed framework and findings are applicable to infectious disease forecasting more broadly, particularly in settings with limited national historical data.
Adaptive Monitoring of Stochastic Fire Front Processes via Information-seeking Predictive Control
Jan 16, 2026We consider the problem of adaptively monitoring a wildfire front using a mobile agent (e.g., a drone), whose trajectory determines where sensor data is collected and thus influences the accuracy of fire propagation estimation. This is a challenging problem, as the stochastic nature of wildfire evolution requires the seamless integration of sensing, estimation, and control, often treated separately in existing methods. State-of-the-art methods either impose linear-Gaussian assumptions to establish optimality or rely on approximations and heuristics, often without providing explicit performance guarantees. To address these limitations, we formulate the fire front monitoring task as a stochastic optimal control problem that integrates sensing, estimation, and control. We derive an optimal recursive Bayesian estimator for a class of stochastic nonlinear elliptical-growth fire front models. Subsequently, we transform the resulting nonlinear stochastic control problem into a finite-horizon Markov decision process and design an information-seeking predictive control law obtained via a lower confidence bound-based adaptive search algorithm with asymptotic convergence to the optimal policy.
Investigating Forecasting Models for Pandemic Infections Using Heterogeneous Data Sources: A 2-year Study with COVID-19
Jul 17, 2025Emerging in December 2019, the COVID-19 pandemic caused widespread health, economic, and social disruptions. Rapid global transmission overwhelmed healthcare systems, resulting in high infection rates, hospitalisations, and fatalities. To minimise the spread, governments implemented several non-pharmaceutical interventions like lockdowns and travel restrictions. While effective in controlling transmission, these measures also posed significant economic and societal challenges. Although the WHO declared COVID-19 no longer a global health emergency in May 2023, its impact persists, shaping public health strategies. The vast amount of data collected during the pandemic offers valuable insights into disease dynamics, transmission, and intervention effectiveness. Leveraging these insights can improve forecasting models, enhancing preparedness and response to future outbreaks while mitigating their social and economic impact. This paper presents a large-scale case study on COVID-19 forecasting in Cyprus, utilising a two-year dataset that integrates epidemiological data, vaccination records, policy measures, and weather conditions. We analyse infection trends, assess forecasting performance, and examine the influence of external factors on disease dynamics. The insights gained contribute to improved pandemic preparedness and response strategies.
VLM-RRT: Vision Language Model Guided RRT Search for Autonomous UAV Navigation
May 29, 2025Path planning is a fundamental capability of autonomous Unmanned Aerial Vehicles (UAVs), enabling them to efficiently navigate toward a target region or explore complex environments while avoiding obstacles. Traditional pathplanning methods, such as Rapidly-exploring Random Trees (RRT), have proven effective but often encounter significant challenges. These include high search space complexity, suboptimal path quality, and slow convergence, issues that are particularly problematic in high-stakes applications like disaster response, where rapid and efficient planning is critical. To address these limitations and enhance path-planning efficiency, we propose Vision Language Model RRT (VLM-RRT), a hybrid approach that integrates the pattern recognition capabilities of Vision Language Models (VLMs) with the path-planning strengths of RRT. By leveraging VLMs to provide initial directional guidance based on environmental snapshots, our method biases sampling toward regions more likely to contain feasible paths, significantly improving sampling efficiency and path quality. Extensive quantitative and qualitative experiments with various state-of-the-art VLMs demonstrate the effectiveness of this proposed approach.
Rolling Horizon Coverage Control with Collaborative Autonomous Agents
Apr 08, 2025



This work proposes a coverage controller that enables an aerial team of distributed autonomous agents to collaboratively generate non-myopic coverage plans over a rolling finite horizon, aiming to cover specific points on the surface area of a 3D object of interest. The collaborative coverage problem, formulated, as a distributed model predictive control problem, optimizes the agents' motion and camera control inputs, while considering inter-agent constraints aiming at reducing work redundancy. The proposed coverage controller integrates constraints based on light-path propagation techniques to predict the parts of the object's surface that are visible with regard to the agents' future anticipated states. This work also demonstrates how complex, non-linear visibility assessment constraints can be converted into logical expressions that are embedded as binary constraints into a mixed-integer optimization framework. The proposed approach has been demonstrated through simulations and practical applications for inspecting buildings with unmanned aerial vehicles (UAVs).
Jointly-optimized Trajectory Generation and Camera Control for 3D Coverage Planning
Apr 08, 2025This work proposes a jointly optimized trajectory generation and camera control approach, enabling an autonomous agent, such as an unmanned aerial vehicle (UAV) operating in 3D environments, to plan and execute coverage trajectories that maximally cover the surface area of a 3D object of interest. Specifically, the UAV's kinematic and camera control inputs are jointly optimized over a rolling planning horizon to achieve complete 3D coverage of the object. The proposed controller incorporates ray-tracing into the planning process to simulate the propagation of light rays, thereby determining the visible parts of the object through the UAV's camera. This integration enables the generation of precise look-ahead coverage trajectories. The coverage planning problem is formulated as a rolling finite-horizon optimal control problem and solved using mixed-integer programming techniques. Extensive real-world and synthetic experiments validate the performance of the proposed approach.
Cooperative Aerial Robot Inspection Challenge: A Benchmark for Heterogeneous Multi-UAV Planning and Lessons Learned
Jan 14, 2025



We propose the Cooperative Aerial Robot Inspection Challenge (CARIC), a simulation-based benchmark for motion planning algorithms in heterogeneous multi-UAV systems. CARIC features UAV teams with complementary sensors, realistic constraints, and evaluation metrics prioritizing inspection quality and efficiency. It offers a ready-to-use perception-control software stack and diverse scenarios to support the development and evaluation of task allocation and motion planning algorithms. Competitions using CARIC were held at IEEE CDC 2023 and the IROS 2024 Workshop on Multi-Robot Perception and Navigation, attracting innovative solutions from research teams worldwide. This paper examines the top three teams from CDC 2023, analyzing their exploration, inspection, and task allocation strategies while drawing insights into their performance across scenarios. The results highlight the task's complexity and suggest promising directions for future research in cooperative multi-UAV systems.
DiRecNetV2: A Transformer-Enhanced Network for Aerial Disaster Recognition
Oct 17, 2024The integration of Unmanned Aerial Vehicles (UAVs) with artificial intelligence (AI) models for aerial imagery processing in disaster assessment, necessitates models that demonstrate exceptional accuracy, computational efficiency, and real-time processing capabilities. Traditionally Convolutional Neural Networks (CNNs), demonstrate efficiency in local feature extraction but are limited by their potential for global context interpretation. On the other hand, Vision Transformers (ViTs) show promise for improved global context interpretation through the use of attention mechanisms, although they still remain underinvestigated in UAV-based disaster response applications. Bridging this research gap, we introduce DiRecNetV2, an improved hybrid model that utilizes convolutional and transformer layers. It merges the inductive biases of CNNs for robust feature extraction with the global context understanding of Transformers, maintaining a low computational load ideal for UAV applications. Additionally, we introduce a new, compact multi-label dataset of disasters, to set an initial benchmark for future research, exploring how models trained on single-label data perform in a multi-label test set. The study assesses lightweight CNNs and ViTs on the AIDERSv2 dataset, based on the frames per second (FPS) for efficiency and the weighted F1 scores for classification performance. DiRecNetV2 not only achieves a weighted F1 score of 0.964 on a single-label test set but also demonstrates adaptability, with a score of 0.614 on a complex multi-label test set, while functioning at 176.13 FPS on the Nvidia Orin Jetson device.
* 23 pages
Adaptive Autopilot: Constrained DRL for Diverse Driving Behaviors
Jul 02, 2024



In pursuit of autonomous vehicles, achieving human-like driving behavior is vital. This study introduces adaptive autopilot (AA), a unique framework utilizing constrained-deep reinforcement learning (C-DRL). AA aims to safely emulate human driving to reduce the necessity for driver intervention. Focusing on the car-following scenario, the process involves (i) extracting data from the highD natural driving study and categorizing it into three driving styles using a rule-based classifier; (ii) employing deep neural network (DNN) regressors to predict human-like acceleration across styles; and (iii) using C-DRL, specifically the soft actor-critic Lagrangian technique, to learn human-like safe driving policies. Results indicate effectiveness in each step, with the rule-based classifier distinguishing driving styles, the regressor model accurately predicting acceleration, outperforming traditional car-following models, and C-DRL agents learning optimal policies for humanlike driving across styles.
Edge-Assisted ML-Aided Uncertainty-Aware Vehicle Collision Avoidance at Urban Intersections
Apr 22, 2024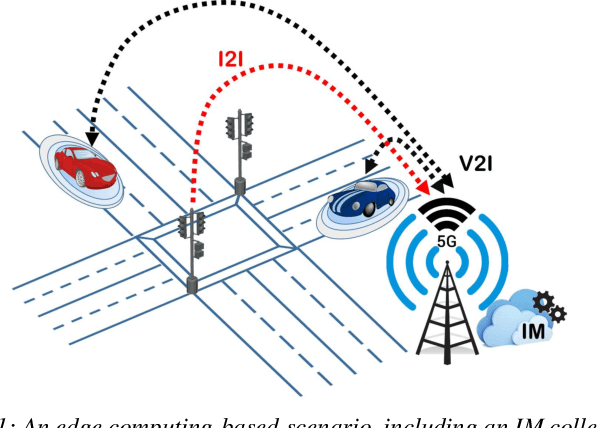
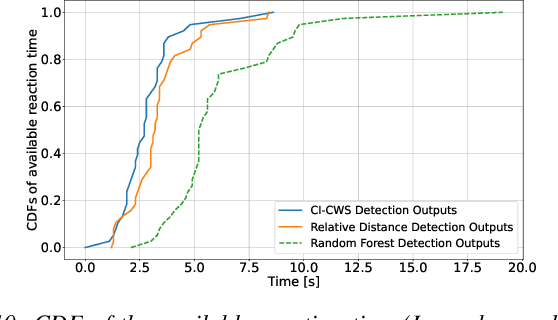
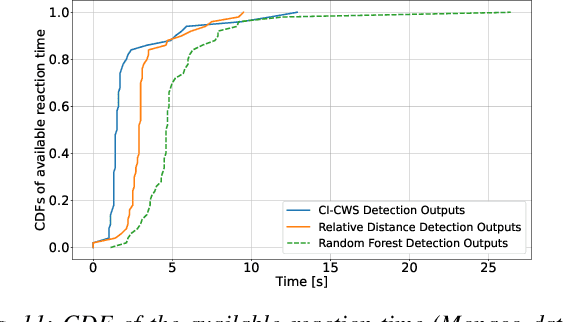
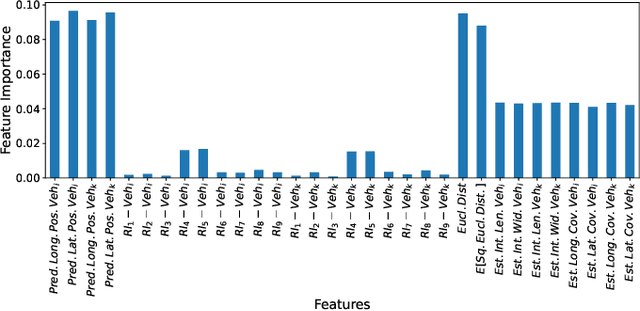
Intersection crossing represents one of the most dangerous sections of the road infrastructure and Connected Vehicles (CVs) can serve as a revolutionary solution to the problem. In this work, we present a novel framework that detects preemptively collisions at urban crossroads, exploiting the Multi-access Edge Computing (MEC) platform of 5G networks. At the MEC, an Intersection Manager (IM) collects information from both vehicles and the road infrastructure to create a holistic view of the area of interest. Based on the historical data collected, the IM leverages the capabilities of an encoder-decoder recurrent neural network to predict, with high accuracy, the future vehicles' trajectories. As, however, accuracy is not a sufficient measure of how much we can trust a model, trajectory predictions are additionally associated with a measure of uncertainty towards confident collision forecasting and avoidance. Hence, contrary to any other approach in the state of the art, an uncertainty-aware collision prediction framework is developed that is shown to detect well in advance (and with high reliability) if two vehicles are on a collision course. Subsequently, collision detection triggers a number of alarms that signal the colliding vehicles to brake. Under real-world settings, thanks to the preemptive capabilities of the proposed approach, all the simulated imminent dangers are averted.