 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJointly-optimized Trajectory Generation and Camera Control for 3D Coverage Planning
Apr 08, 2025This work proposes a jointly optimized trajectory generation and camera control approach, enabling an autonomous agent, such as an unmanned aerial vehicle (UAV) operating in 3D environments, to plan and execute coverage trajectories that maximally cover the surface area of a 3D object of interest. Specifically, the UAV's kinematic and camera control inputs are jointly optimized over a rolling planning horizon to achieve complete 3D coverage of the object. The proposed controller incorporates ray-tracing into the planning process to simulate the propagation of light rays, thereby determining the visible parts of the object through the UAV's camera. This integration enables the generation of precise look-ahead coverage trajectories. The coverage planning problem is formulated as a rolling finite-horizon optimal control problem and solved using mixed-integer programming techniques. Extensive real-world and synthetic experiments validate the performance of the proposed approach.
Rolling Horizon Coverage Control with Collaborative Autonomous Agents
Apr 08, 2025



This work proposes a coverage controller that enables an aerial team of distributed autonomous agents to collaboratively generate non-myopic coverage plans over a rolling finite horizon, aiming to cover specific points on the surface area of a 3D object of interest. The collaborative coverage problem, formulated, as a distributed model predictive control problem, optimizes the agents' motion and camera control inputs, while considering inter-agent constraints aiming at reducing work redundancy. The proposed coverage controller integrates constraints based on light-path propagation techniques to predict the parts of the object's surface that are visible with regard to the agents' future anticipated states. This work also demonstrates how complex, non-linear visibility assessment constraints can be converted into logical expressions that are embedded as binary constraints into a mixed-integer optimization framework. The proposed approach has been demonstrated through simulations and practical applications for inspecting buildings with unmanned aerial vehicles (UAVs).
Efficient Global Neural Architecture Search
Feb 05, 2025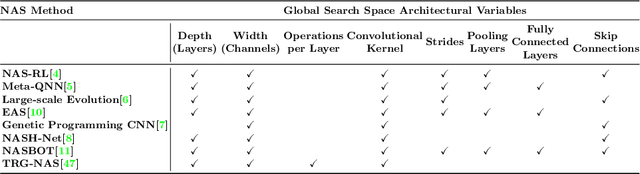
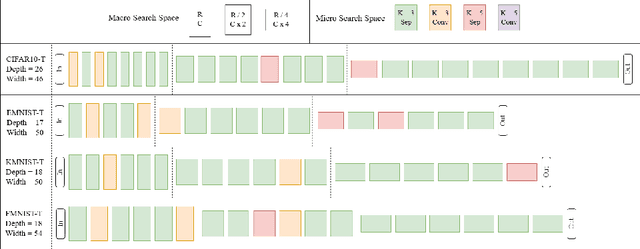

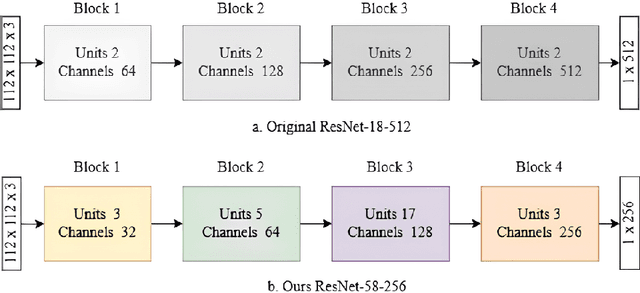
Neural architecture search (NAS) has shown promise towards automating neural network design for a given task, but it is computationally demanding due to training costs associated with evaluating a large number of architectures to find the optimal one. To speed up NAS, recent works limit the search to network building blocks (modular search) instead of searching the entire architecture (global search), approximate candidates' performance evaluation in lieu of complete training, and use gradient descent rather than naturally suitable discrete optimization approaches. However, modular search does not determine network's macro architecture i.e. depth and width, demanding manual trial and error post-search, hence lacking automation. In this work, we revisit NAS and design a navigable, yet architecturally diverse, macro-micro search space. In addition, to determine relative rankings of candidates, existing methods employ consistent approximations across entire search spaces, whereas different networks may not be fairly comparable under one training protocol. Hence, we propose an architecture-aware approximation with variable training schemes for different networks. Moreover, we develop an efficient search strategy by disjoining macro-micro network design that yields competitive architectures in terms of both accuracy and size. Our proposed framework achieves a new state-of-the-art on EMNIST and KMNIST, while being highly competitive on the CIFAR-10, CIFAR-100, and FashionMNIST datasets and being 2-4x faster than the fastest global search methods. Lastly, we demonstrate the transferability of our framework to real-world computer vision problems by discovering competitive architectures for face recognition applications.
Cooperative Receding Horizon 3D Coverage Control with a Team of Networked Aerial Agents
Jan 28, 2024This work proposes a receding horizon coverage control approach which allows multiple autonomous aerial agents to work cooperatively in order cover the total surface area of a 3D object of interest. The cooperative coverage problem which is posed in this work as an optimal control problem, jointly optimizes the agents' kinematic and camera control inputs, while considering coupling constraints amongst the team of agents which aim at minimizing the duplication of work. To generate look-ahead coverage trajectories over a finite planning horizon, the proposed approach integrates visibility constraints into the proposed coverage controller in order to determine the visible part of the object with respect to the agents' future states. In particular, we show how non-linear and non-convex visibility determination constraints can be transformed into logical constraints which can easily be embedded into a mixed integer optimization program.
Convolutional Channel-wise Competitive Learning for the Forward-Forward Algorithm
Dec 19, 2023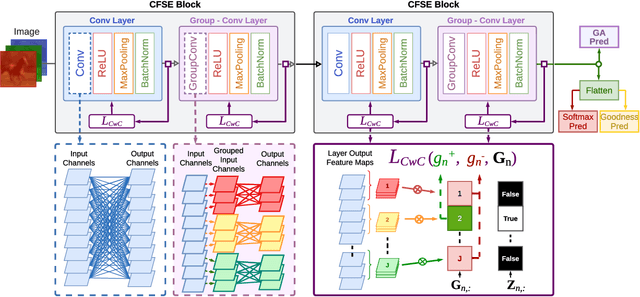
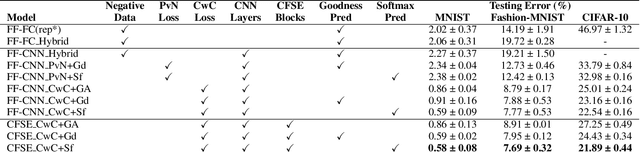

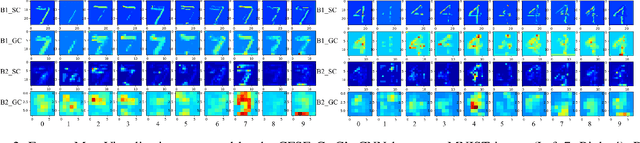
The Forward-Forward (FF) Algorithm has been recently proposed to alleviate the issues of backpropagation (BP) commonly used to train deep neural networks. However, its current formulation exhibits limitations such as the generation of negative data, slower convergence, and inadequate performance on complex tasks. In this paper, we take the main ideas of FF and improve them by leveraging channel-wise competitive learning in the context of convolutional neural networks for image classification tasks. A layer-wise loss function is introduced that promotes competitive learning and eliminates the need for negative data construction. To enhance both the learning of compositional features and feature space partitioning, a channel-wise feature separator and extractor block is proposed that complements the competitive learning process. Our method outperforms recent FF-based models on image classification tasks, achieving testing errors of 0.58%, 7.69%, 21.89%, and 48.77% on MNIST, Fashion-MNIST, CIFAR-10 and CIFAR-100 respectively. Our approach bridges the performance gap between FF learning and BP methods, indicating the potential of our proposed approach to learn useful representations in a layer-wise modular fashion, enabling more efficient and flexible learning.
Unscented Optimal Control for 3D Coverage Planning with an Autonomous UAV Agent
Jun 30, 2023



We propose a novel probabilistically robust controller for the guidance of an unmanned aerial vehicle (UAV) in coverage planning missions, which can simultaneously optimize both the UAV's motion, and camera control inputs for the 3D coverage of a given object of interest. Specifically, the coverage planning problem is formulated in this work as an optimal control problem with logical constraints to enable the UAV agent to jointly: a) select a series of discrete camera field-of-view states which satisfy a set of coverage constraints, and b) optimize its motion control inputs according to a specified mission objective. We show how this hybrid optimal control problem can be solved with standard optimization tools by converting the logical expressions in the constraints into equality/inequality constraints involving only continuous variables. Finally, probabilistic robustness is achieved by integrating the unscented transformation to the proposed controller, thus enabling the design of robust open-loop coverage plans which take into account the future posterior distribution of the UAV's state inside the planning horizon.
UAV-based Receding Horizon Control for 3D Inspection Planning
Apr 20, 2023



Nowadays, unmanned aerial vehicles or UAVs are being used for a wide range of tasks, including infrastructure inspection, automated monitoring and coverage. This paper investigates the problem of 3D inspection planning with an autonomous UAV agent which is subject to dynamical and sensing constraints. We propose a receding horizon 3D inspection planning control approach for generating optimal trajectories which enable an autonomous UAV agent to inspect a finite number of feature-points scattered on the surface of a cuboid-like structure of interest. The inspection planning problem is formulated as a constrained open-loop optimal control problem and is solved using mixed integer programming (MIP) optimization. Quantitative and qualitative evaluation demonstrates the effectiveness of the proposed approach.
Integrated Ray-Tracing and Coverage Planning Control using Reinforcement Learning
Apr 19, 2023



In this work we propose a coverage planning control approach which allows a mobile agent, equipped with a controllable sensor (i.e., a camera) with limited sensing domain (i.e., finite sensing range and angle of view), to cover the surface area of an object of interest. The proposed approach integrates ray-tracing into the coverage planning process, thus allowing the agent to identify which parts of the scene are visible at any point in time. The problem of integrated ray-tracing and coverage planning control is first formulated as a constrained optimal control problem (OCP), which aims at determining the agent's optimal control inputs over a finite planning horizon, that minimize the coverage time. Efficiently solving the resulting OCP is however very challenging due to non-convex and non-linear visibility constraints. To overcome this limitation, the problem is converted into a Markov decision process (MDP) which is then solved using reinforcement learning. In particular, we show that a controller which follows an optimal control law can be learned using off-policy temporal-difference control (i.e., Q-learning). Extensive numerical experiments demonstrate the effectiveness of the proposed approach for various configurations of the agent and the object of interest.
* 2022 IEEE 61st Conference on Decision and Control (CDC), 06-09 December 2022, Cancun, Mexico
Towards Automated 3D Search Planning for Emergency Response Missions
Apr 07, 2023The ability to efficiently plan and execute automated and precise search missions using unmanned aerial vehicles (UAVs) during emergency response situations is imperative. Precise navigation between obstacles and time-efficient searching of 3D structures and buildings are essential for locating survivors and people in need in emergency response missions. In this work we address this challenging problem by proposing a unified search planning framework that automates the process of UAV-based search planning in 3D environments. Specifically, we propose a novel search planning framework which enables automated planning and execution of collision-free search trajectories in 3D by taking into account low-level mission constrains (e.g., the UAV dynamical and sensing model), mission objectives (e.g., the mission execution time and the UAV energy efficiency) and user-defined mission specifications (e.g., the 3D structures to be searched and minimum detection probability constraints). The capabilities and performance of the proposed approach are demonstrated through extensive simulated 3D search scenarios.
* Journal of Intelligent & Robotic Systems 103.1 (2021): 2
3D Trajectory Planning for UAV-based Search Missions: An Integrated Assessment and Search Planning Approach
Feb 24, 2023



The ability to efficiently plan and execute search missions in challenging and complex environments during natural and man-made disasters is imperative. In many emergency situations, precise navigation between obstacles and time-efficient searching around 3D structures is essential for finding survivors. In this work we propose an integrated assessment and search planning approach which allows an autonomous UAV (unmanned aerial vehicle) agent to plan and execute collision-free search trajectories in 3D environments. More specifically, the proposed search-planning framework aims to integrate and automate the first two phases (i.e., the assessment phase and the search phase) of a traditional search-and-rescue (SAR) mission. In the first stage, termed assessment-planning we aim to find a high-level assessment plan which the UAV agent can execute in order to visit a set of points of interest. The generated plan of this stage guides the UAV to fly over the objects of interest thus providing a first assessment of the situation at hand. In the second stage, termed search-planning, the UAV trajectory is further fine-tuned to allow the UAV to search in 3D (i.e., across all faces) the objects of interest for survivors. The performance of the proposed approach is demonstrated through extensive simulation analysis.
* 2021 International Conference on Unmanned Aircraft Systems (ICUAS)