 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Aerial Robot Inspection Challenge: A Benchmark for Heterogeneous Multi-UAV Planning and Lessons Learned
Jan 14, 2025



We propose the Cooperative Aerial Robot Inspection Challenge (CARIC), a simulation-based benchmark for motion planning algorithms in heterogeneous multi-UAV systems. CARIC features UAV teams with complementary sensors, realistic constraints, and evaluation metrics prioritizing inspection quality and efficiency. It offers a ready-to-use perception-control software stack and diverse scenarios to support the development and evaluation of task allocation and motion planning algorithms. Competitions using CARIC were held at IEEE CDC 2023 and the IROS 2024 Workshop on Multi-Robot Perception and Navigation, attracting innovative solutions from research teams worldwide. This paper examines the top three teams from CDC 2023, analyzing their exploration, inspection, and task allocation strategies while drawing insights into their performance across scenarios. The results highlight the task's complexity and suggest promising directions for future research in cooperative multi-UAV systems.
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Apr 18, 2024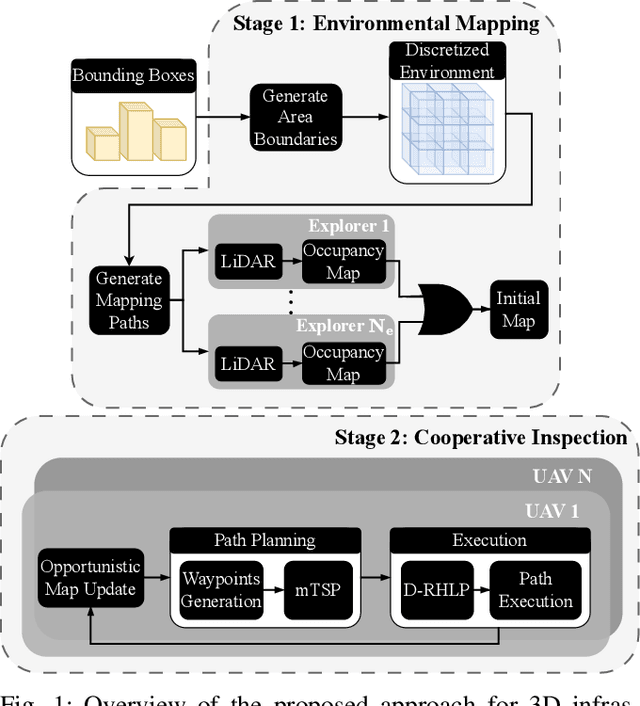
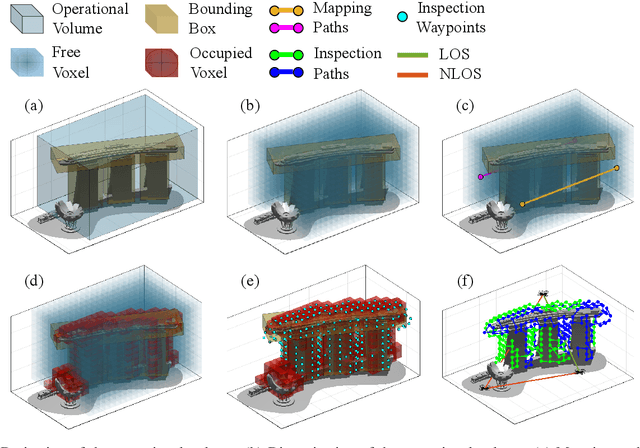
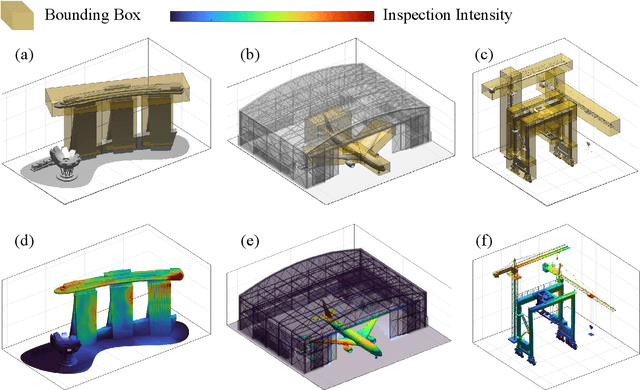
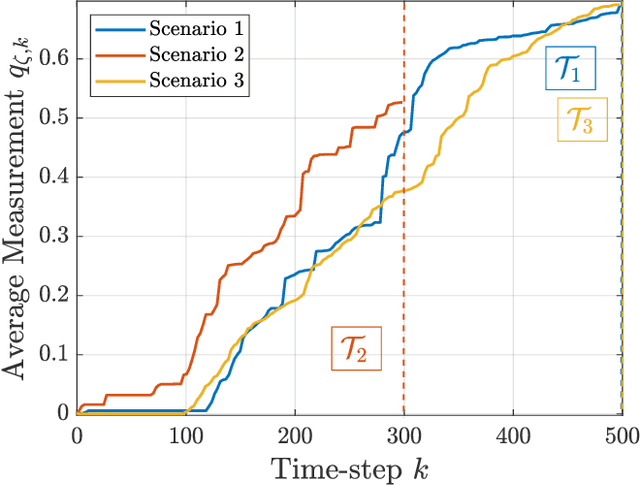
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
Normal Approximation for Stochastic Gradient Descent via Non-Asymptotic Rates of Martingale CLT
Apr 03, 2019We provide non-asymptotic convergence rates of the Polyak-Ruppert averaged stochastic gradient descent (SGD) to a normal random vector for a class of twice-differentiable test functions. A crucial intermediate step is proving a non-asymptotic martingale central limit theorem (CLT), i.e., establishing the rates of convergence of a multivariate martingale difference sequence to a normal random vector, which might be of independent interest. We obtain the explicit rates for the multivariate martingale CLT using a combination of Stein's method and Lindeberg's argument, which is then used in conjunction with a non-asymptotic analysis of averaged SGD proposed in [PJ92]. Our results have potentially interesting consequences for computing confidence intervals for parameter estimation with SGD and constructing hypothesis tests with SGD that are valid in a non-asymptotic sense.