 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Autopilot: Constrained DRL for Diverse Driving Behaviors
Jul 02, 2024



In pursuit of autonomous vehicles, achieving human-like driving behavior is vital. This study introduces adaptive autopilot (AA), a unique framework utilizing constrained-deep reinforcement learning (C-DRL). AA aims to safely emulate human driving to reduce the necessity for driver intervention. Focusing on the car-following scenario, the process involves (i) extracting data from the highD natural driving study and categorizing it into three driving styles using a rule-based classifier; (ii) employing deep neural network (DNN) regressors to predict human-like acceleration across styles; and (iii) using C-DRL, specifically the soft actor-critic Lagrangian technique, to learn human-like safe driving policies. Results indicate effectiveness in each step, with the rule-based classifier distinguishing driving styles, the regressor model accurately predicting acceleration, outperforming traditional car-following models, and C-DRL agents learning optimal policies for humanlike driving across styles.
Edge-Assisted ML-Aided Uncertainty-Aware Vehicle Collision Avoidance at Urban Intersections
Apr 22, 2024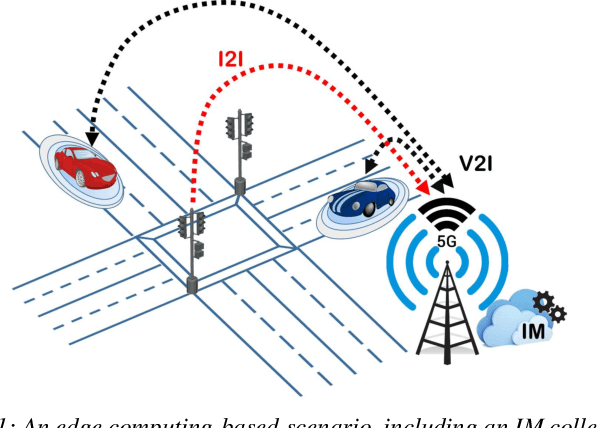
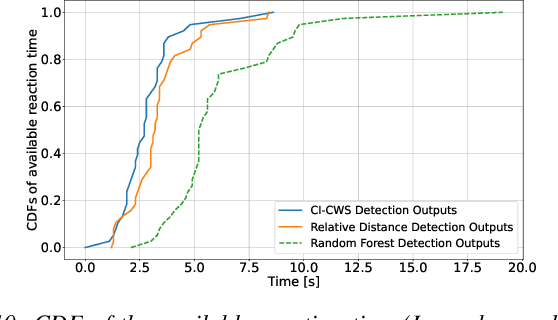
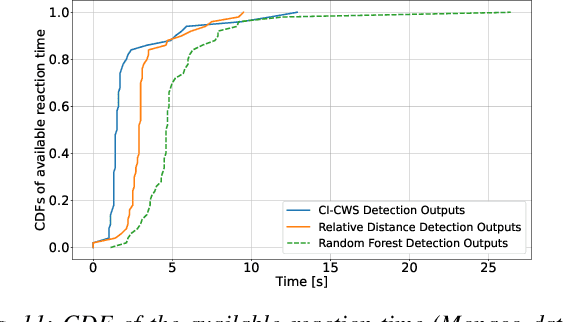
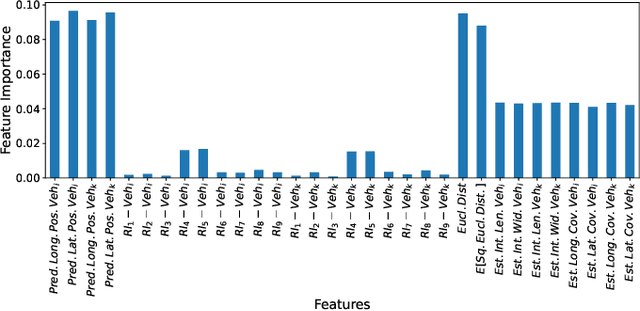
Intersection crossing represents one of the most dangerous sections of the road infrastructure and Connected Vehicles (CVs) can serve as a revolutionary solution to the problem. In this work, we present a novel framework that detects preemptively collisions at urban crossroads, exploiting the Multi-access Edge Computing (MEC) platform of 5G networks. At the MEC, an Intersection Manager (IM) collects information from both vehicles and the road infrastructure to create a holistic view of the area of interest. Based on the historical data collected, the IM leverages the capabilities of an encoder-decoder recurrent neural network to predict, with high accuracy, the future vehicles' trajectories. As, however, accuracy is not a sufficient measure of how much we can trust a model, trajectory predictions are additionally associated with a measure of uncertainty towards confident collision forecasting and avoidance. Hence, contrary to any other approach in the state of the art, an uncertainty-aware collision prediction framework is developed that is shown to detect well in advance (and with high reliability) if two vehicles are on a collision course. Subsequently, collision detection triggers a number of alarms that signal the colliding vehicles to brake. Under real-world settings, thanks to the preemptive capabilities of the proposed approach, all the simulated imminent dangers are averted.
Periodic and Event-Triggering for Joint Capacity Maximization and Safe Intersection Crossing
Jul 08, 2022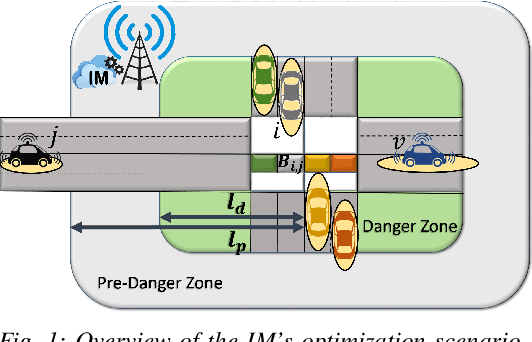
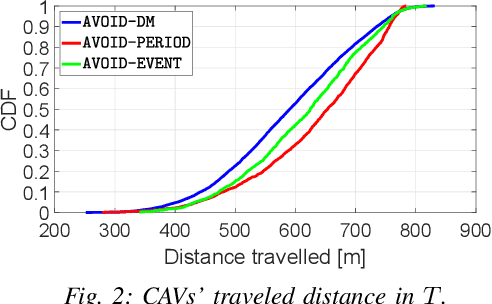
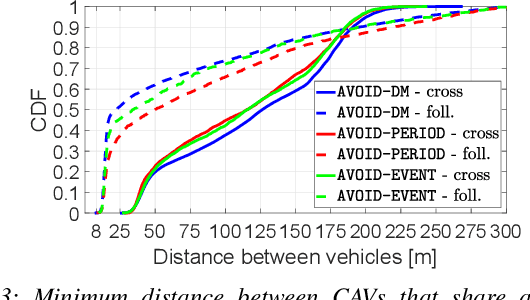
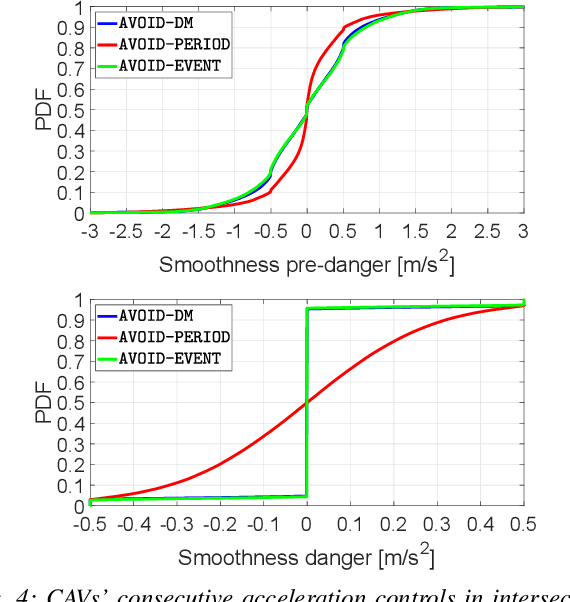
Intersection crossing represents a bottleneck for transportation systems and Connected Autonomous Vehicles (CAVs) may be the groundbreaking solution to the problem. This work proposes a novel framework, i.e, AVOID-PERIOD, where an Intersection Manager (IM) controls CAVs approaching an intersection in order to maximize intersection capacity while minimizing the CAVs' gas consumption. Contrary to most of the works in the literature, the CAVs' location uncertainty is accounted for and periodic communication and re-optimization allows for the creation of safe trajectories for the CAVs. To improve scalability for high-traffic intersections, an event-triggering approach is also developed (AVOID-EVENT) that minimizes computational and communication complexity. AVOID-EVENT reduces the number of re-optimizations required by 92.2%, while retaining most of the benefits introduced by AVOID-PERIOD.