 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Autopilot: Constrained DRL for Diverse Driving Behaviors
Jul 02, 2024



In pursuit of autonomous vehicles, achieving human-like driving behavior is vital. This study introduces adaptive autopilot (AA), a unique framework utilizing constrained-deep reinforcement learning (C-DRL). AA aims to safely emulate human driving to reduce the necessity for driver intervention. Focusing on the car-following scenario, the process involves (i) extracting data from the highD natural driving study and categorizing it into three driving styles using a rule-based classifier; (ii) employing deep neural network (DNN) regressors to predict human-like acceleration across styles; and (iii) using C-DRL, specifically the soft actor-critic Lagrangian technique, to learn human-like safe driving policies. Results indicate effectiveness in each step, with the rule-based classifier distinguishing driving styles, the regressor model accurately predicting acceleration, outperforming traditional car-following models, and C-DRL agents learning optimal policies for humanlike driving across styles.
Edge-Assisted ML-Aided Uncertainty-Aware Vehicle Collision Avoidance at Urban Intersections
Apr 22, 2024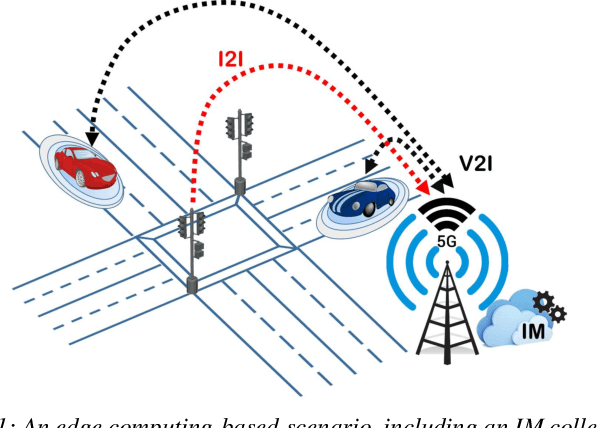
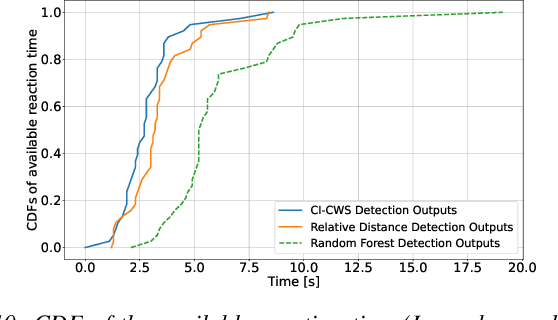
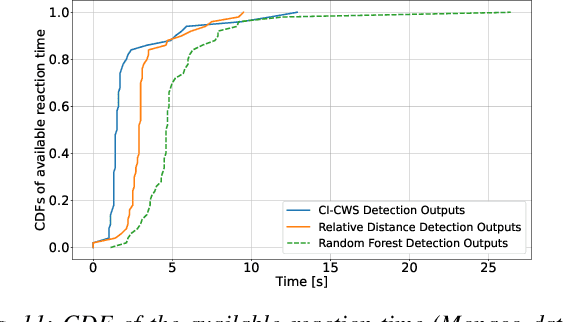
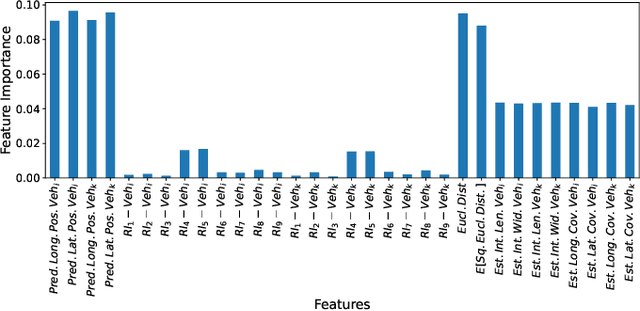
Intersection crossing represents one of the most dangerous sections of the road infrastructure and Connected Vehicles (CVs) can serve as a revolutionary solution to the problem. In this work, we present a novel framework that detects preemptively collisions at urban crossroads, exploiting the Multi-access Edge Computing (MEC) platform of 5G networks. At the MEC, an Intersection Manager (IM) collects information from both vehicles and the road infrastructure to create a holistic view of the area of interest. Based on the historical data collected, the IM leverages the capabilities of an encoder-decoder recurrent neural network to predict, with high accuracy, the future vehicles' trajectories. As, however, accuracy is not a sufficient measure of how much we can trust a model, trajectory predictions are additionally associated with a measure of uncertainty towards confident collision forecasting and avoidance. Hence, contrary to any other approach in the state of the art, an uncertainty-aware collision prediction framework is developed that is shown to detect well in advance (and with high reliability) if two vehicles are on a collision course. Subsequently, collision detection triggers a number of alarms that signal the colliding vehicles to brake. Under real-world settings, thanks to the preemptive capabilities of the proposed approach, all the simulated imminent dangers are averted.
Multi-Step Traffic Prediction for Multi-Period Planning in Optical Networks
Apr 12, 2024A multi-period planning framework is proposed that exploits multi-step ahead traffic predictions to address service overprovisioning and improve adaptability to traffic changes, while ensuring the necessary quality-of-service (QoS) levels. An encoder-decoder deep learning model is initially leveraged for multi-step ahead prediction by analyzing real-traffic traces. This information is then exploited by multi-period planning heuristics to efficiently utilize available network resources while minimizing undesired service disruptions (caused due to lightpath re-allocations), with these heuristics outperforming a single-step ahead prediction approach.
Machine Learning for Real-Time Anomaly Detection in Optical Networks
Jun 19, 2023


This work proposes a real-time anomaly detection scheme that leverages the multi-step ahead prediction capabilities of encoder-decoder (ED) deep learning models with recurrent units. Specifically, an encoder-decoder is used to model soft-failure evolution over a long future horizon (i.e., for several days ahead) by analyzing past quality-of-transmission (QoT) observations. This information is subsequently used for real-time anomaly detection (e.g., of attack incidents), as the knowledge of how the QoT is expected to evolve allows capturing unexpected network behavior. Specifically, for anomaly detection, a statistical hypothesis testing scheme is used, alleviating the limitations of supervised (SL) and unsupervised learning (UL) schemes, usually applied for this purpose. Indicatively, the proposed scheme eliminates the need for labeled anomalies, required when SL is applied, and the need for on-line analyzing entire datasets to identify abnormal instances (i.e., UL). Overall, it is shown that by utilizing QoT evolution information, the proposed approach can effectively detect abnormal deviations in real-time. Importantly, it is shown that the information concerning soft-failure evolution (i.e., QoT predictions) is essential to accurately detect anomalies.
Modeling Soft-Failure Evolution for Triggering Timely Repair with Low QoT Margins
Aug 30, 2022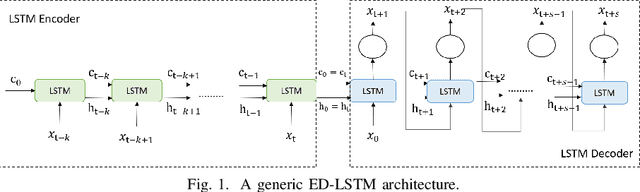
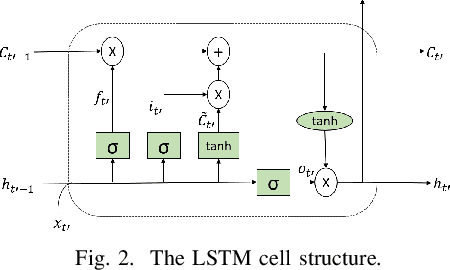
In this work, the capabilities of an encoder-decoder learning framework are leveraged to predict soft-failure evolution over a long future horizon. This enables the triggering of timely repair actions with low quality-of-transmission (QoT) margins before a costly hard-failure occurs, ultimately reducing the frequency of repair actions and associated operational expenses. Specifically, it is shown that the proposed scheme is capable of triggering a repair action several days prior to the expected day of a hard-failure, contrary to soft-failure detection schemes utilizing rule-based fixed QoT margins, that may lead either to premature repair actions (i.e., several months before the event of a hard-failure) or to repair actions that are taken too late (i.e., after the hard failure has occurred). Both frameworks are evaluated and compared for a lightpath established in an elastic optical network, where soft-failure evolution can be modeled by analyzing bit-error-rate information monitored at the coherent receivers.
SafeDrones: Real-Time Reliability Evaluation of UAVs using Executable Digital Dependable Identities
Jul 12, 2022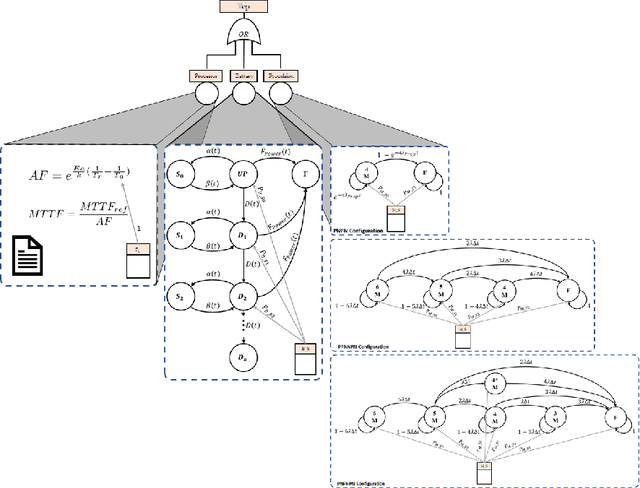
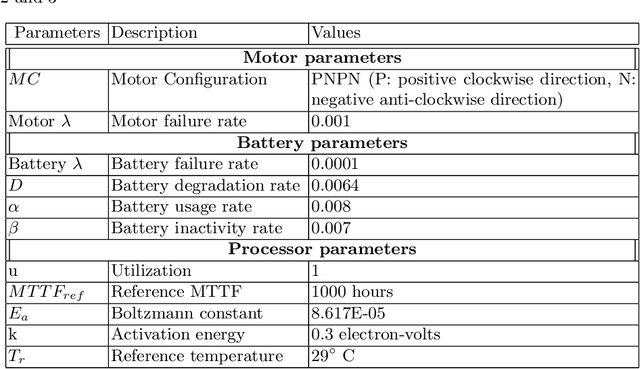
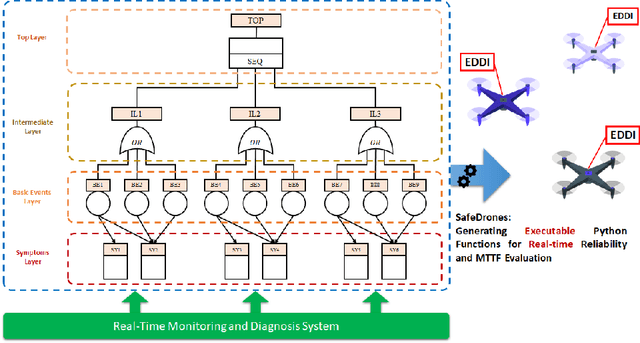

The use of Unmanned Arial Vehicles (UAVs) offers many advantages across a variety of applications. However, safety assurance is a key barrier to widespread usage, especially given the unpredictable operational and environmental factors experienced by UAVs, which are hard to capture solely at design-time. This paper proposes a new reliability modeling approach called SafeDrones to help address this issue by enabling runtime reliability and risk assessment of UAVs. It is a prototype instantiation of the Executable Digital Dependable Identity (EDDI) concept, which aims to create a model-based solution for real-time, data-driven dependability assurance for multi-robot systems. By providing real-time reliability estimates, SafeDrones allows UAVs to update their missions accordingly in an adaptive manner.
Periodic and Event-Triggering for Joint Capacity Maximization and Safe Intersection Crossing
Jul 08, 2022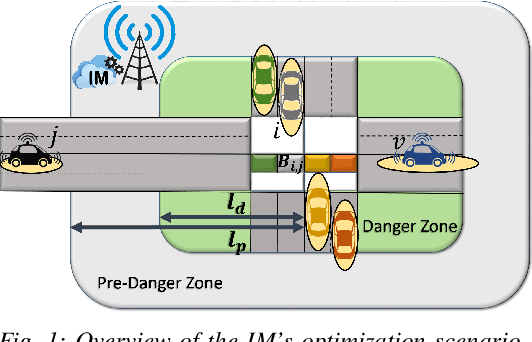
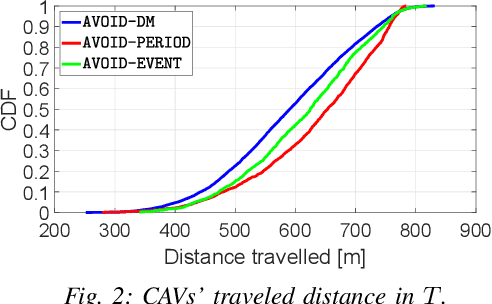
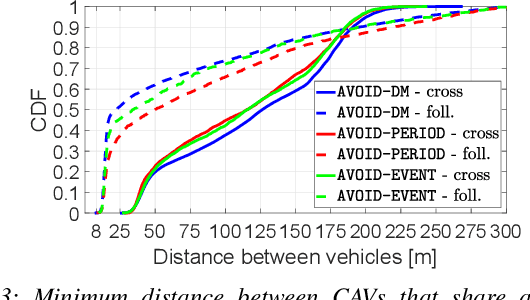
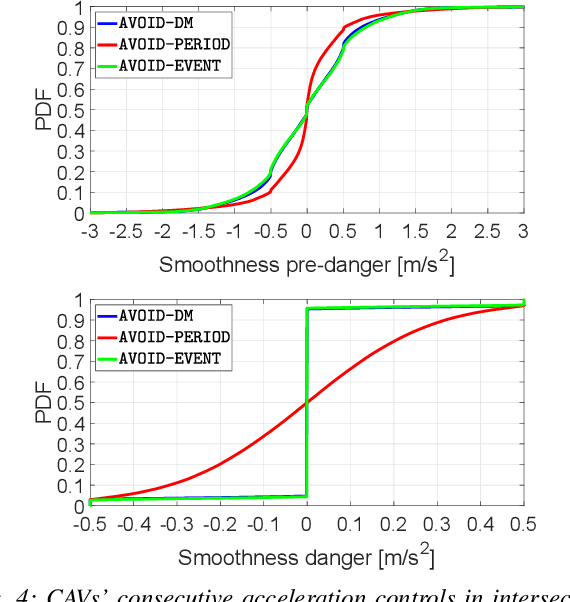
Intersection crossing represents a bottleneck for transportation systems and Connected Autonomous Vehicles (CAVs) may be the groundbreaking solution to the problem. This work proposes a novel framework, i.e, AVOID-PERIOD, where an Intersection Manager (IM) controls CAVs approaching an intersection in order to maximize intersection capacity while minimizing the CAVs' gas consumption. Contrary to most of the works in the literature, the CAVs' location uncertainty is accounted for and periodic communication and re-optimization allows for the creation of safe trajectories for the CAVs. To improve scalability for high-traffic intersections, an event-triggering approach is also developed (AVOID-EVENT) that minimizes computational and communication complexity. AVOID-EVENT reduces the number of re-optimizations required by 92.2%, while retaining most of the benefits introduced by AVOID-PERIOD.
Adaptive Frequency Band Selection for Accurate and Fast Positioning utilizing SOPs
Jun 09, 2022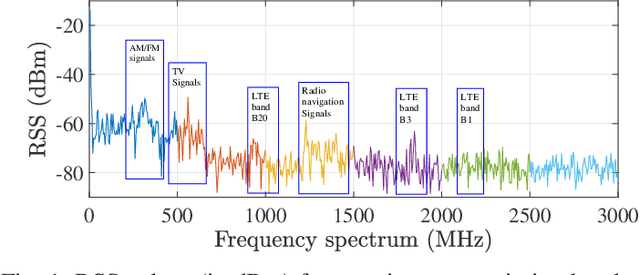
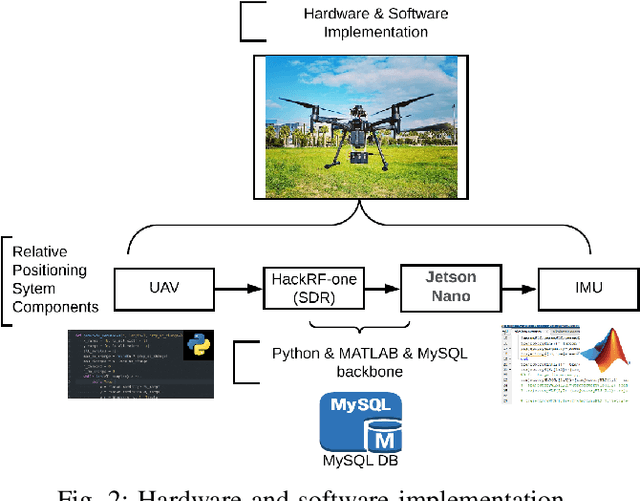
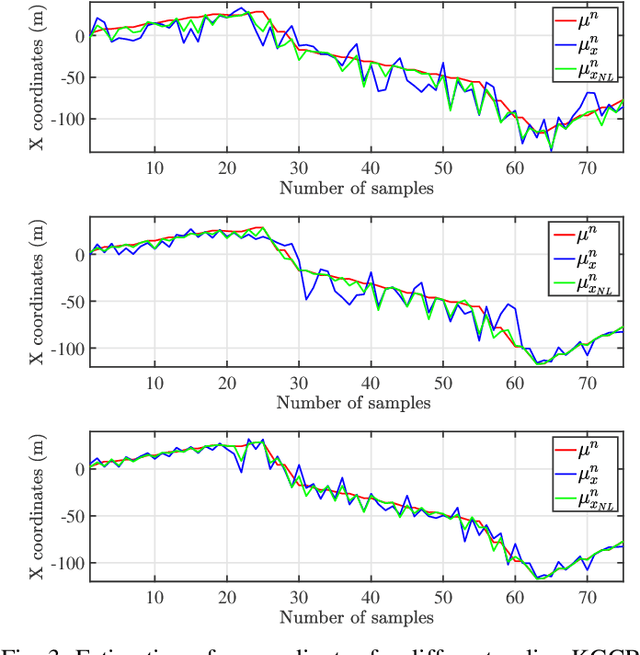
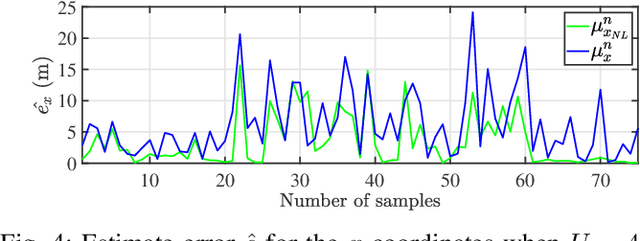
Signals of opportunity (SOPs) are a promising technique that can be used for relative positioning in areas where global navigation satellite system (GNSS) information is unreliable or unavailable. This technique processes features of the various signals transmitted over a broad wireless spectrum to enable a receiver to position itself in space. This work examines the frequency selection problem in order to achieve fast and accurate positioning using only the received signal strength (RSS) of the surrounding signals. Starting with a prior belief, the problem of searching for a frequency band that best matches a predicted location trajectory is investigated. To maximize the accuracy of the position estimate, a ranking-and-selection problem is mathematically formulated. A knowledge-gradient (KG) algorithm from optimal learning theory is proposed that uses correlations in the Bayesian prior beliefs of the frequency band values to dramatically reduce the algorithm's processing time. The technique is experimentally tested for a practical scenario of an unmanned aerial vehicle (UAV) moving around a GPS-denied environment, with obtained results demonstrating its validity and practical applicability.
An Autonomous Drone System with Jamming and Relative Positioning Capabilities
Jun 09, 2022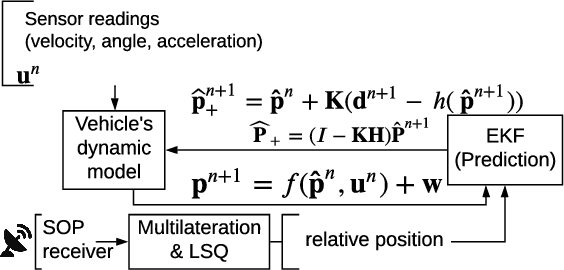
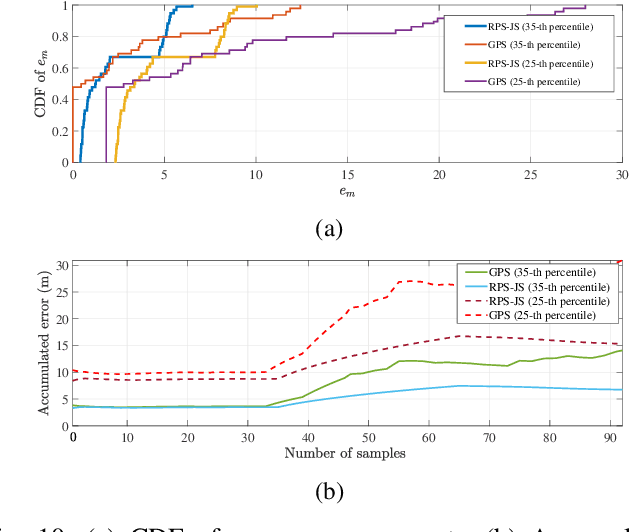
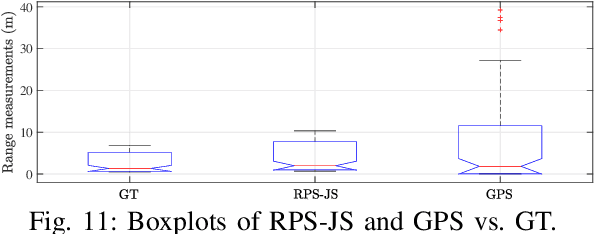
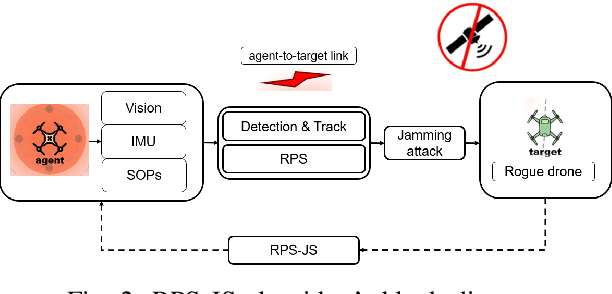
As the number of unauthorized operations of Unmanned Aerial Vehicles (UAVs) is rising, the implementation of a versatile counter-drone system is becoming a necessity. In this work, we develop a drone-based counter-drone system, that employs algorithms for detecting and tracking a rogue drone, in conjunction with wireless interception capabilities to jointly jam the rogue drone while achieving self positioning for the pursuer drone. In the proposed system a software-defined-radio (SDR) is used for switching between jamming transmissions and spectrum sweeping functionalities to achieve the desired GPS disruption and self-localization, respectively. Extensive field experiments demonstrate the effectiveness of the proposed solution in a realworld environment under various parameter settings.
Scheduling Aerial Vehicles in an Urban Air Mobility Scheme
Aug 03, 2021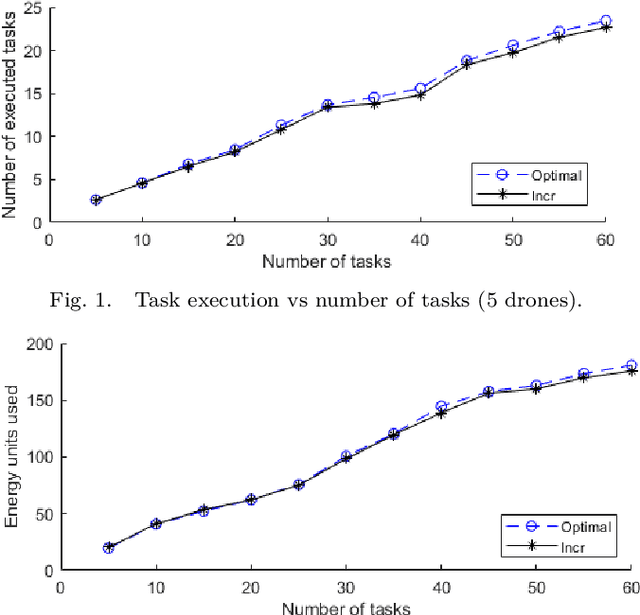
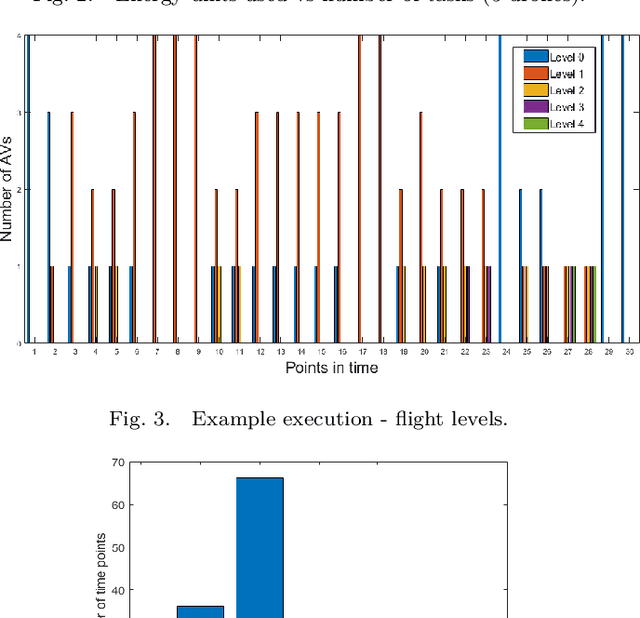
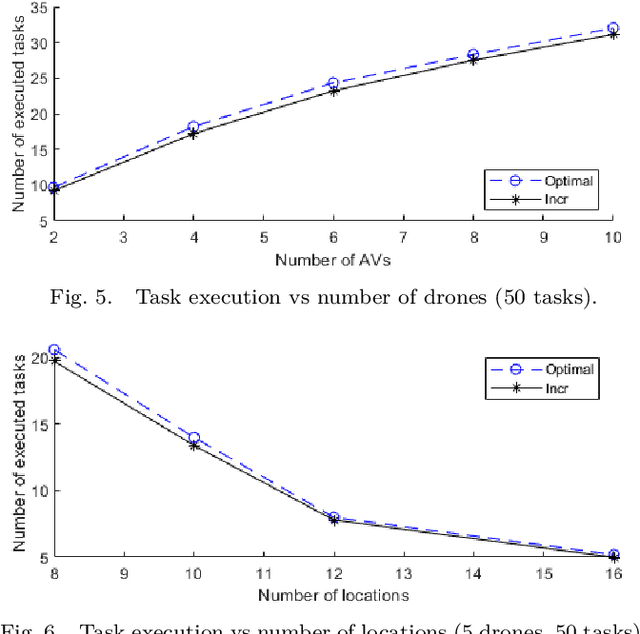
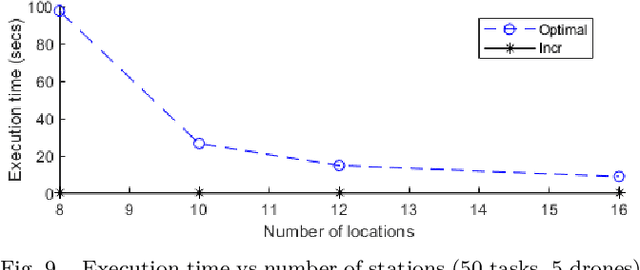
Highly populated cities face several challenges, one of them being the intense traffic congestion. In recent years, the concept of Urban Air Mobility has been put forward by large companies and organizations as a way to address this problem, and this approach has been rapidly gaining ground. This disruptive technology involves aerial vehicles (AVs) for hire than can be utilized by customers to travel between locations within large cities. This concept has the potential to drastically decrease traffic congestion and reduce air pollution, since these vehicles typically use electric motors powered by batteries. This work studies the problem of scheduling the assignment of AVs to customers, having as a goal to maximize the serviced customers and minimize the energy consumption of the AVs by forcing them to fly at the lowest possible altitude. Initially, an Integer Linear Program (ILP) formulation is presented, that is solved offline and optimally, followed by a near-optimal algorithm, that solves the problem incrementally, one AV at a time, to address scalability issues, allowing scheduling in problems involving large numbers of locations, AVs, and customer requests.