 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Frequency Band Selection for Accurate and Fast Positioning utilizing SOPs
Jun 09, 2022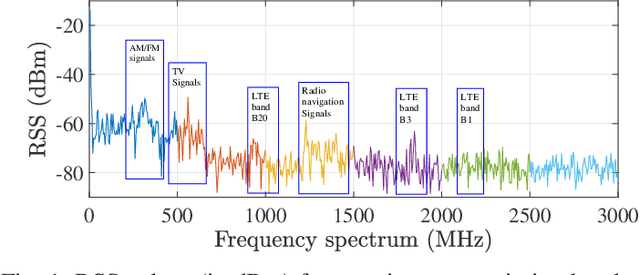
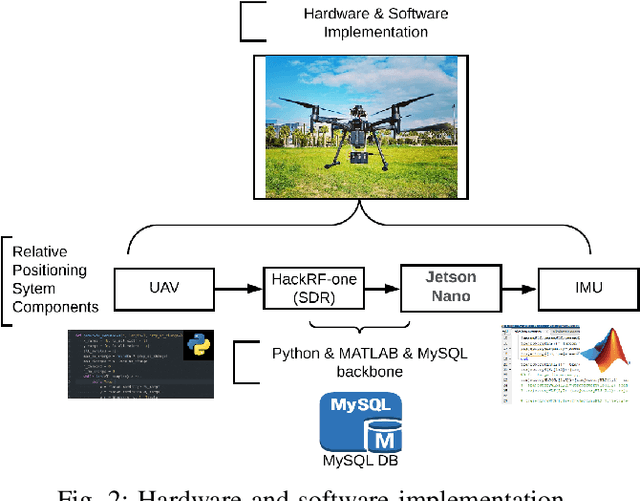
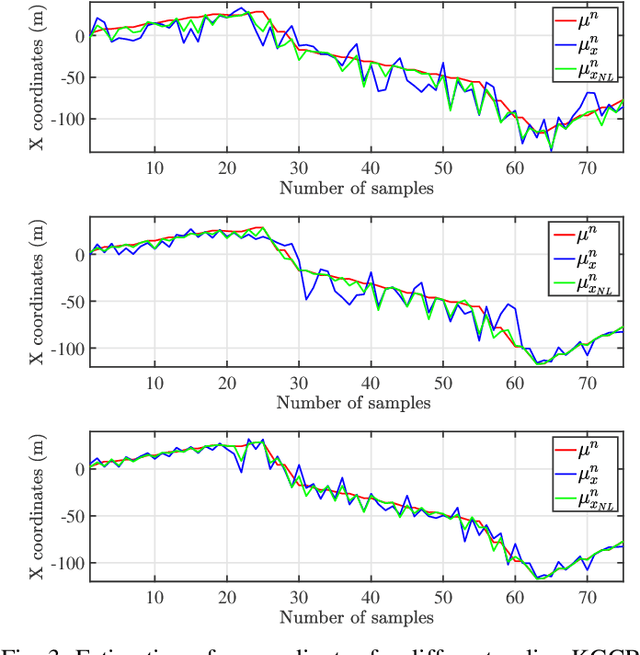
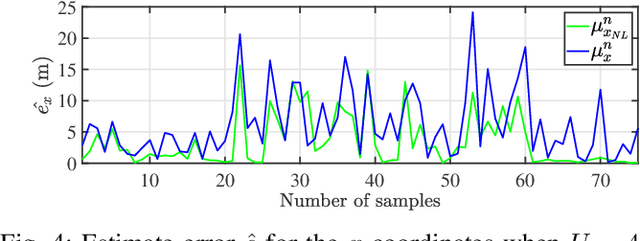
Signals of opportunity (SOPs) are a promising technique that can be used for relative positioning in areas where global navigation satellite system (GNSS) information is unreliable or unavailable. This technique processes features of the various signals transmitted over a broad wireless spectrum to enable a receiver to position itself in space. This work examines the frequency selection problem in order to achieve fast and accurate positioning using only the received signal strength (RSS) of the surrounding signals. Starting with a prior belief, the problem of searching for a frequency band that best matches a predicted location trajectory is investigated. To maximize the accuracy of the position estimate, a ranking-and-selection problem is mathematically formulated. A knowledge-gradient (KG) algorithm from optimal learning theory is proposed that uses correlations in the Bayesian prior beliefs of the frequency band values to dramatically reduce the algorithm's processing time. The technique is experimentally tested for a practical scenario of an unmanned aerial vehicle (UAV) moving around a GPS-denied environment, with obtained results demonstrating its validity and practical applicability.
An Autonomous Drone System with Jamming and Relative Positioning Capabilities
Jun 09, 2022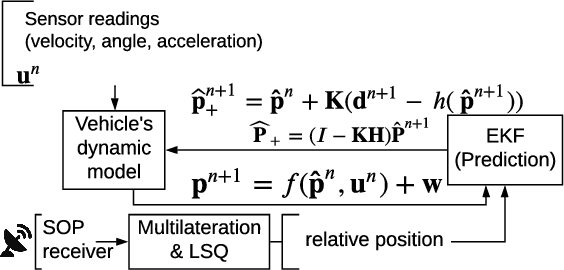
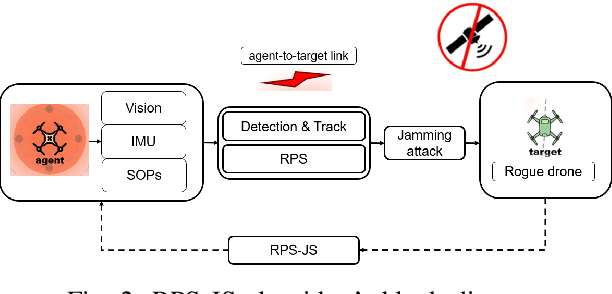
As the number of unauthorized operations of Unmanned Aerial Vehicles (UAVs) is rising, the implementation of a versatile counter-drone system is becoming a necessity. In this work, we develop a drone-based counter-drone system, that employs algorithms for detecting and tracking a rogue drone, in conjunction with wireless interception capabilities to jointly jam the rogue drone while achieving self positioning for the pursuer drone. In the proposed system a software-defined-radio (SDR) is used for switching between jamming transmissions and spectrum sweeping functionalities to achieve the desired GPS disruption and self-localization, respectively. Extensive field experiments demonstrate the effectiveness of the proposed solution in a realworld environment under various parameter settings.