 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRare Event Detection in Imbalanced Multi-Class Datasets Using an Optimal MIP-Based Ensemble Weighting Approach
Dec 18, 2024To address the challenges of imbalanced multi-class datasets typically used for rare event detection in critical cyber-physical systems, we propose an optimal, efficient, and adaptable mixed integer programming (MIP) ensemble weighting scheme. Our approach leverages the diverse capabilities of the classifier ensemble on a granular per class basis, while optimizing the weights of classifier-class pairs using elastic net regularization for improved robustness and generalization. Additionally, it seamlessly and optimally selects a predefined number of classifiers from a given set. We evaluate and compare our MIP-based method against six well-established weighting schemes, using representative datasets and suitable metrics, under various ensemble sizes. The experimental results reveal that MIP outperforms all existing approaches, achieving an improvement in balanced accuracy ranging from 0.99% to 7.31%, with an overall average of 4.53% across all datasets and ensemble sizes. Furthermore, it attains an overall average increase of 4.63%, 4.60%, and 4.61% in macro-averaged precision, recall, and F1-score, respectively, while maintaining computational efficiency.
Physics-Informed Neural Networks for Accelerating Power System State Estimation
Oct 04, 2023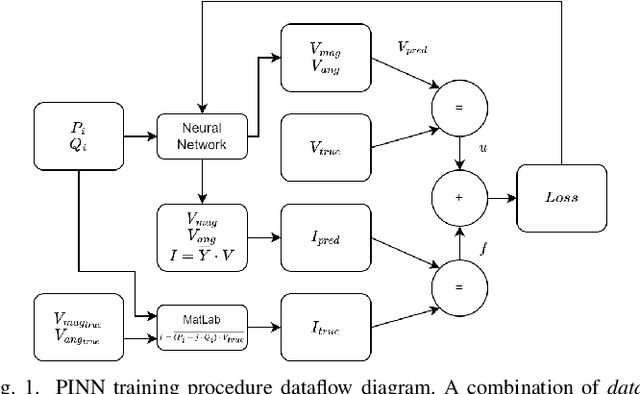
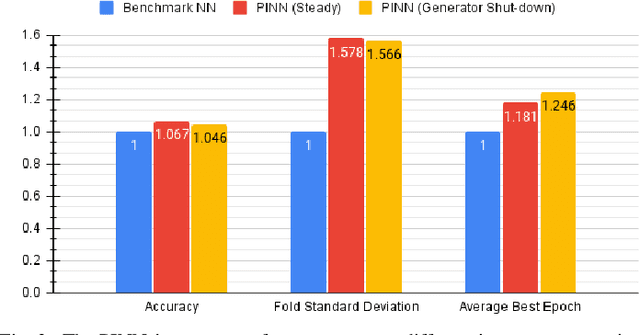
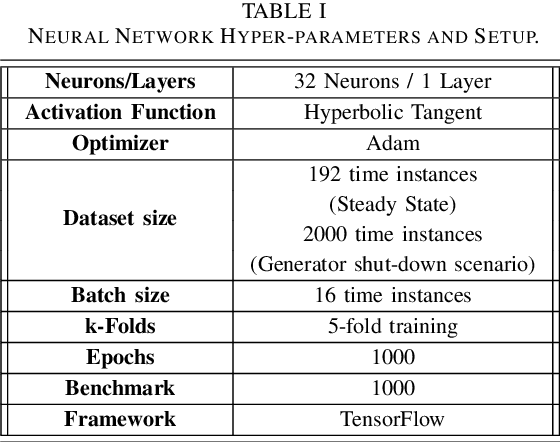
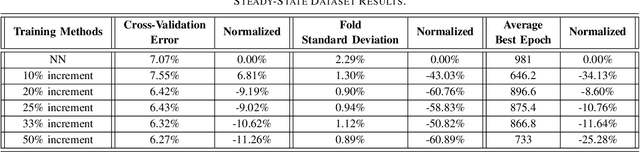
State estimation is the cornerstone of the power system control center since it provides the operating condition of the system in consecutive time intervals. This work investigates the application of physics-informed neural networks (PINNs) for accelerating power systems state estimation in monitoring the operation of power systems. Traditional state estimation techniques often rely on iterative algorithms that can be computationally intensive, particularly for large-scale power systems. In this paper, a novel approach that leverages the inherent physical knowledge of power systems through the integration of PINNs is proposed. By incorporating physical laws as prior knowledge, the proposed method significantly reduces the computational complexity associated with state estimation while maintaining high accuracy. The proposed method achieves up to 11% increase in accuracy, 75% reduction in standard deviation of results, and 30% faster convergence, as demonstrated by comprehensive experiments on the IEEE 14-bus system.
SafeDrones: Real-Time Reliability Evaluation of UAVs using Executable Digital Dependable Identities
Jul 12, 2022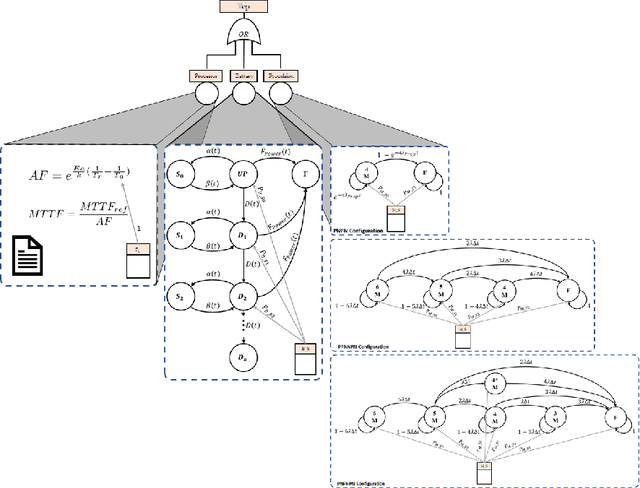
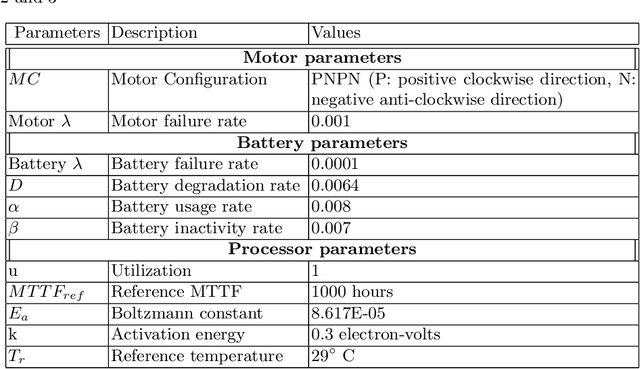
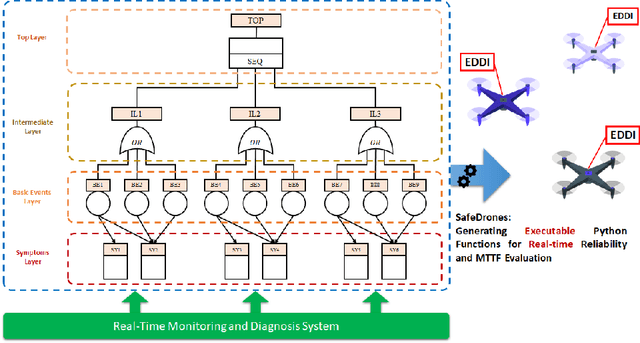

The use of Unmanned Arial Vehicles (UAVs) offers many advantages across a variety of applications. However, safety assurance is a key barrier to widespread usage, especially given the unpredictable operational and environmental factors experienced by UAVs, which are hard to capture solely at design-time. This paper proposes a new reliability modeling approach called SafeDrones to help address this issue by enabling runtime reliability and risk assessment of UAVs. It is a prototype instantiation of the Executable Digital Dependable Identity (EDDI) concept, which aims to create a model-based solution for real-time, data-driven dependability assurance for multi-robot systems. By providing real-time reliability estimates, SafeDrones allows UAVs to update their missions accordingly in an adaptive manner.