 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiMo-Calib: On-Site Fast LiDAR-Motor Calibration for Quadruped Robot-Based Panoramic 3D Sensing System
Paper and Code
Feb 18, 2025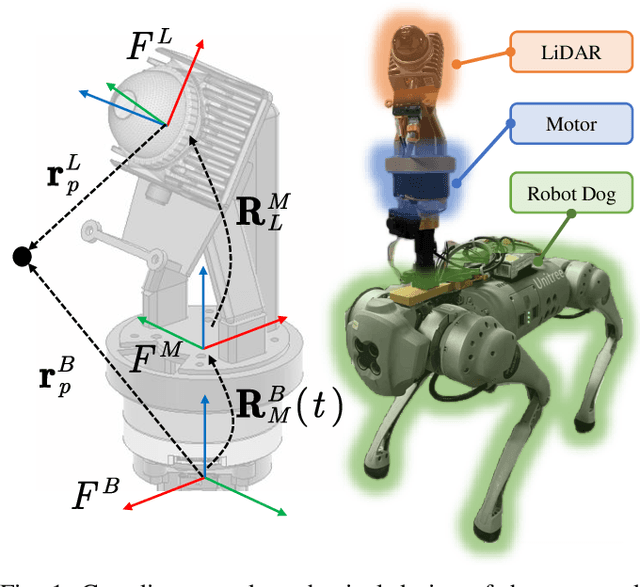
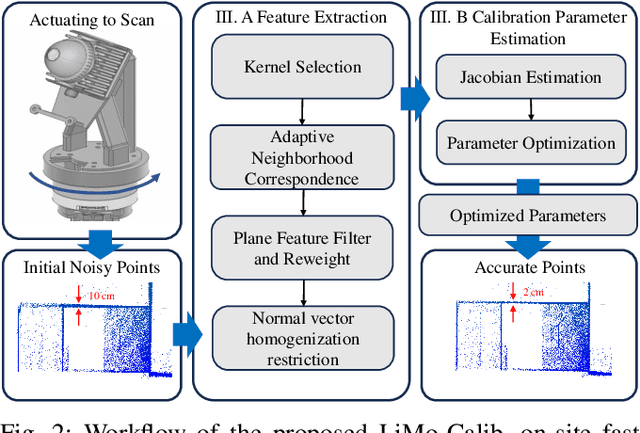
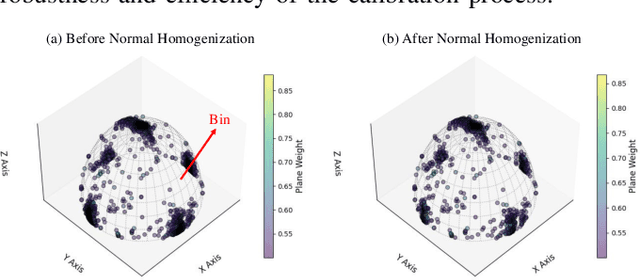

Conventional single LiDAR systems are inherently constrained by their limited field of view (FoV), leading to blind spots and incomplete environmental awareness, particularly on robotic platforms with strict payload limitations. Integrating a motorized LiDAR offers a practical solution by significantly expanding the sensor's FoV and enabling adaptive panoramic 3D sensing. However, the high-frequency vibrations of the quadruped robot introduce calibration challenges, causing variations in the LiDAR-motor transformation that degrade sensing accuracy. Existing calibration methods that use artificial targets or dense feature extraction lack feasibility for on-site applications and real-time implementation. To overcome these limitations, we propose LiMo-Calib, an efficient on-site calibration method that eliminates the need for external targets by leveraging geometric features directly from raw LiDAR scans. LiMo-Calib optimizes feature selection based on normal distribution to accelerate convergence while maintaining accuracy and incorporates a reweighting mechanism that evaluates local plane fitting quality to enhance robustness. We integrate and validate the proposed method on a motorized LiDAR system mounted on a quadruped robot, demonstrating significant improvements in calibration efficiency and 3D sensing accuracy, making LiMo-Calib well-suited for real-world robotic applications. The demo video is available at: https://youtu.be/FMINa-sap7g