 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete Diffusion VLA: Bringing Discrete Diffusion to Action Decoding in Vision-Language-Action Policies
Aug 27, 2025Vision-Language-Action (VLA) models adapt large vision-language backbones to map images and instructions to robot actions. However, prevailing VLA decoders either generate actions autoregressively in a fixed left-to-right order or attach continuous diffusion or flow matching heads outside the backbone, demanding specialized training and iterative sampling that hinder a unified, scalable architecture. We present Discrete Diffusion VLA, a single-transformer policy that models discretized action chunks with discrete diffusion and is trained with the same cross-entropy objective as the VLM backbone. The design retains diffusion's progressive refinement paradigm while remaining natively compatible with the discrete token interface of VLMs. Our method achieves an adaptive decoding order that resolves easy action elements before harder ones and uses secondary remasking to revisit uncertain predictions across refinement rounds, which improves consistency and enables robust error correction. This unified decoder preserves pretrained vision language priors, supports parallel decoding, breaks the autoregressive bottleneck, and reduces the number of function evaluations. Discrete Diffusion VLA achieves 96.3% avg. SR on LIBERO, 71.2% visual matching on SimplerEnv Fractal and 49.3% overall on SimplerEnv Bridge, improving over both autoregressive and continuous diffusion baselines. These findings indicate that discrete-diffusion action decoder supports precise action modeling and consistent training, laying groundwork for scaling VLA to larger models and datasets.
Collaborative Planning for Catching and Transporting Objects in Unstructured Environments
Nov 13, 2023



Multi-robot teams have attracted attention from industry and academia for their ability to perform collaborative tasks in unstructured environments, such as wilderness rescue and collaborative transportation.In this paper, we propose a trajectory planning method for a non-holonomic robotic team with collaboration in unstructured environments.For the adaptive state collaboration of a robot team to catch and transport targets to be rescued using a net, we model the process of catching the falling target with a net in a continuous and differentiable form.This enables the robot team to fully exploit the kinematic potential, thereby adaptively catching the target in an appropriate state.Furthermore, the size safety and topological safety of the net, resulting from the collaborative support of the robots, are guaranteed through geometric constraints.We integrate our algorithm on a car-like robot team and test it in simulations and real-world experiments to validate our performance.Our method is compared to state-of-the-art multi-vehicle trajectory planning methods, demonstrating significant performance in efficiency and trajectory quality.
Differential Flatness-Based Trajectory Planning for Autonomous Vehicles
Aug 28, 2022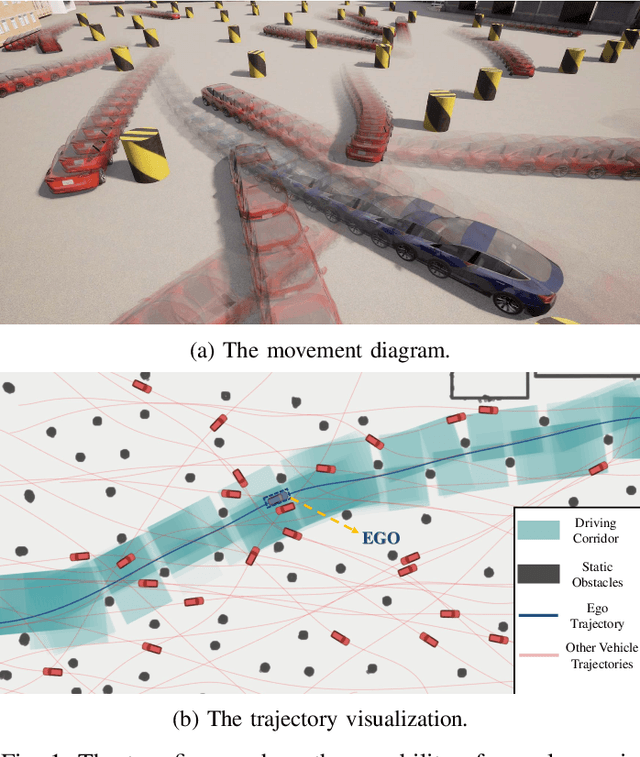
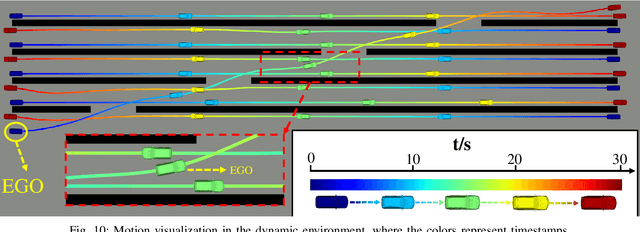
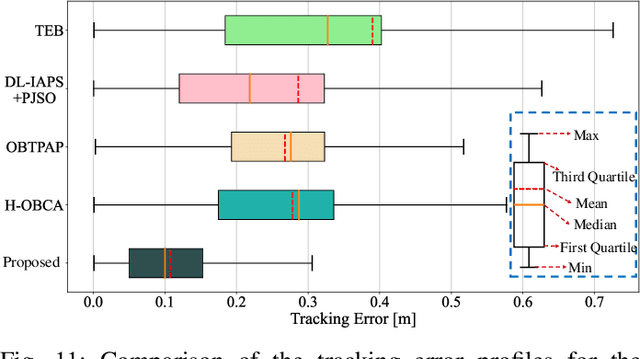
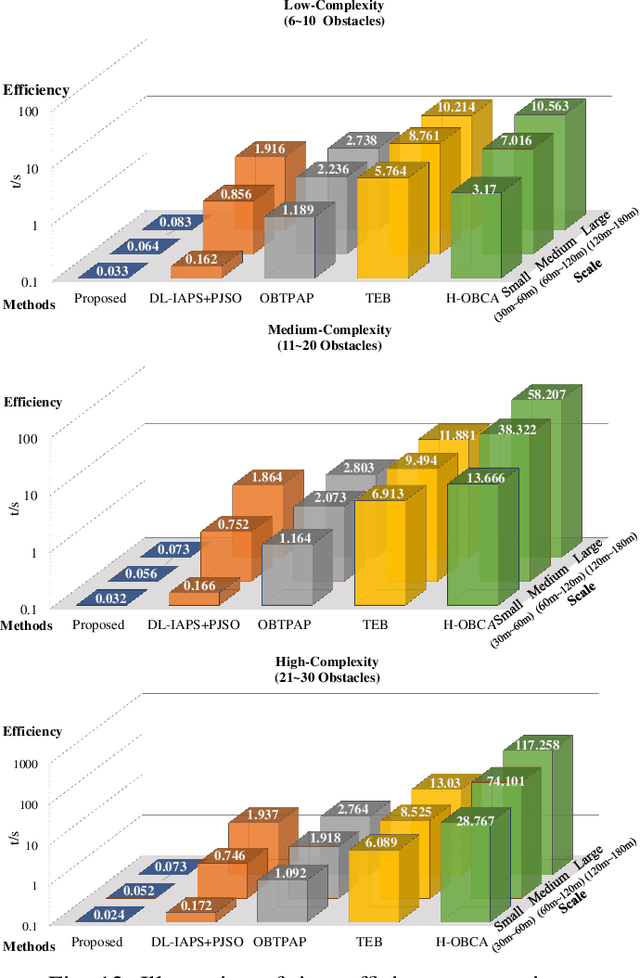
As a core part of autonomous driving systems, motion planning has received extensive attention from academia and industry. However, there is no efficient trajectory planning solution capable of spatial-temporal joint optimization due to nonholonomic dynamics, particularly in the presence of unstructured environments and dynamic obstacles. To bridge the gap, we propose a versatile and real-time trajectory optimization method that can generate a high-quality feasible trajectory using a full vehicle model under arbitrary constraints. By leveraging the differential flatness property of car-like robots, we use flat outputs to analytically formulate all feasibility constraints to simplify the trajectory planning problem. Moreover, obstacle avoidance is achieved with full dimensional polygons to generate less conservative trajectories with safety guarantees, especially in tightly constrained spaces. We present comprehensive benchmarks with cutting-edge methods, demonstrating the significance of the proposed method in terms of efficiency and trajectory quality. Real-world experiments verify the practicality of our algorithm. We will release our codes as open-source packages with the purpose for the reference of the research community.